Advanced Control Theory: Lead-Lag Compensator Design and MATLAB
VerifiedAdded on 2023/04/20
|14
|976
|328
Homework Assignment
AI Summary
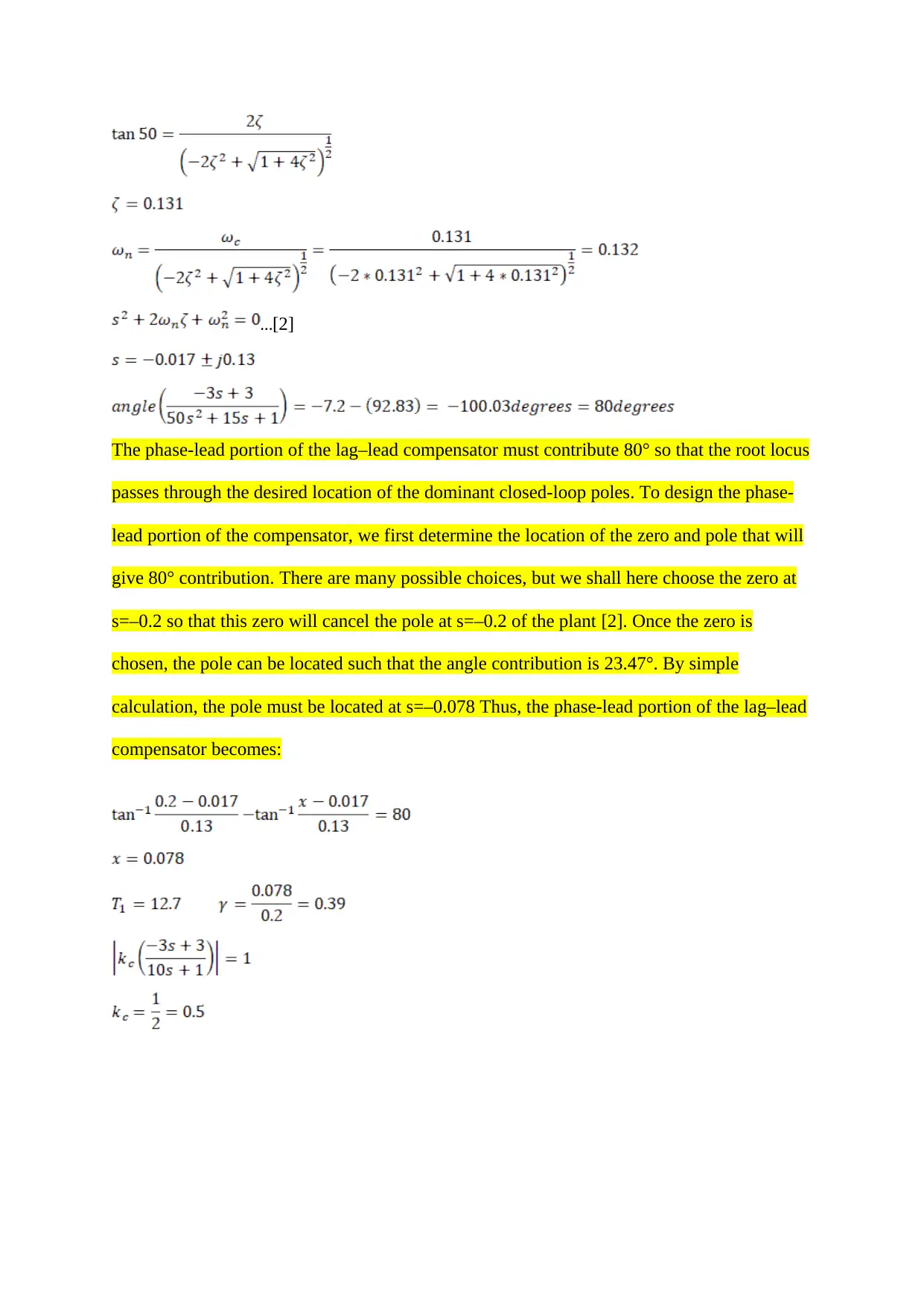
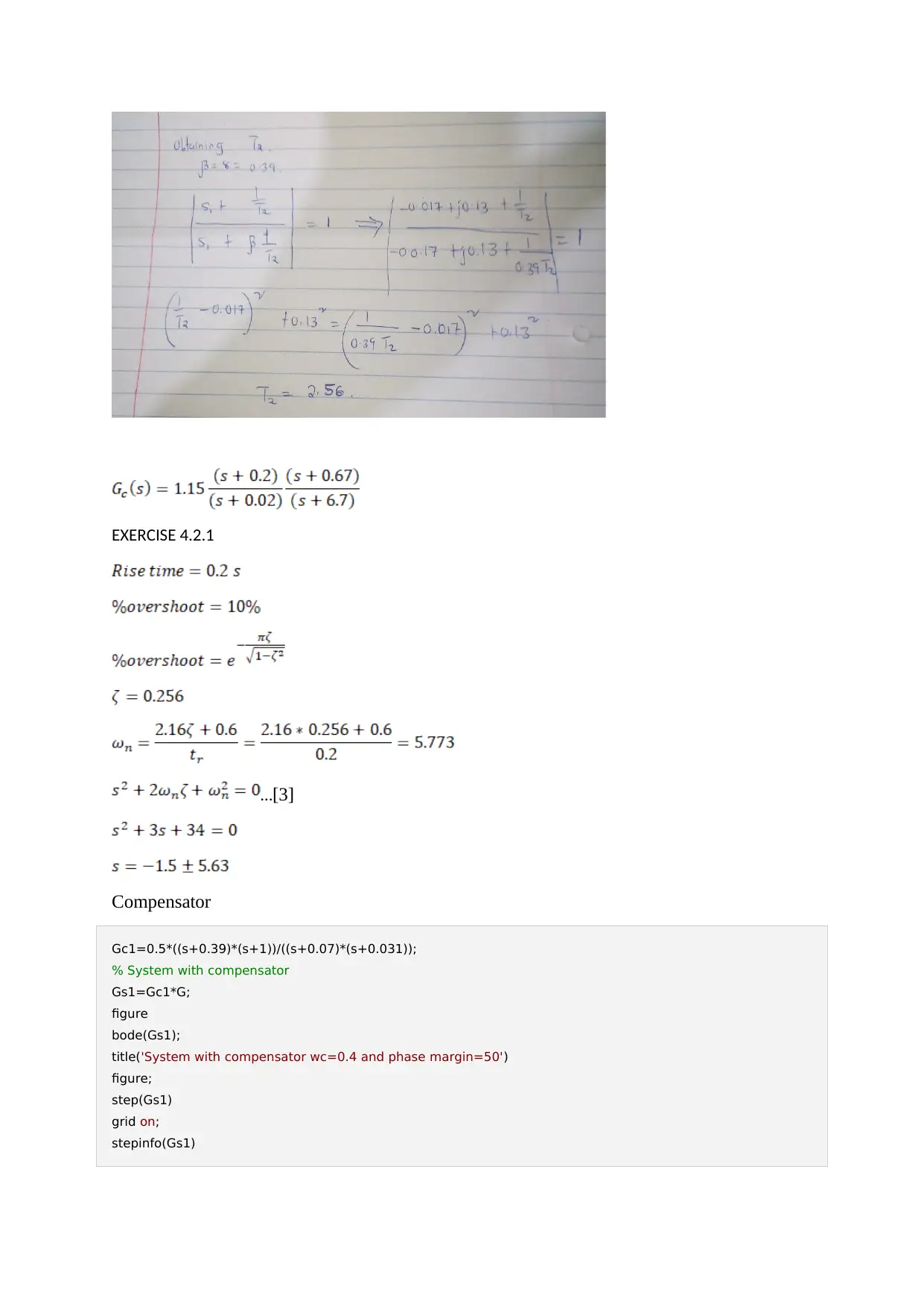
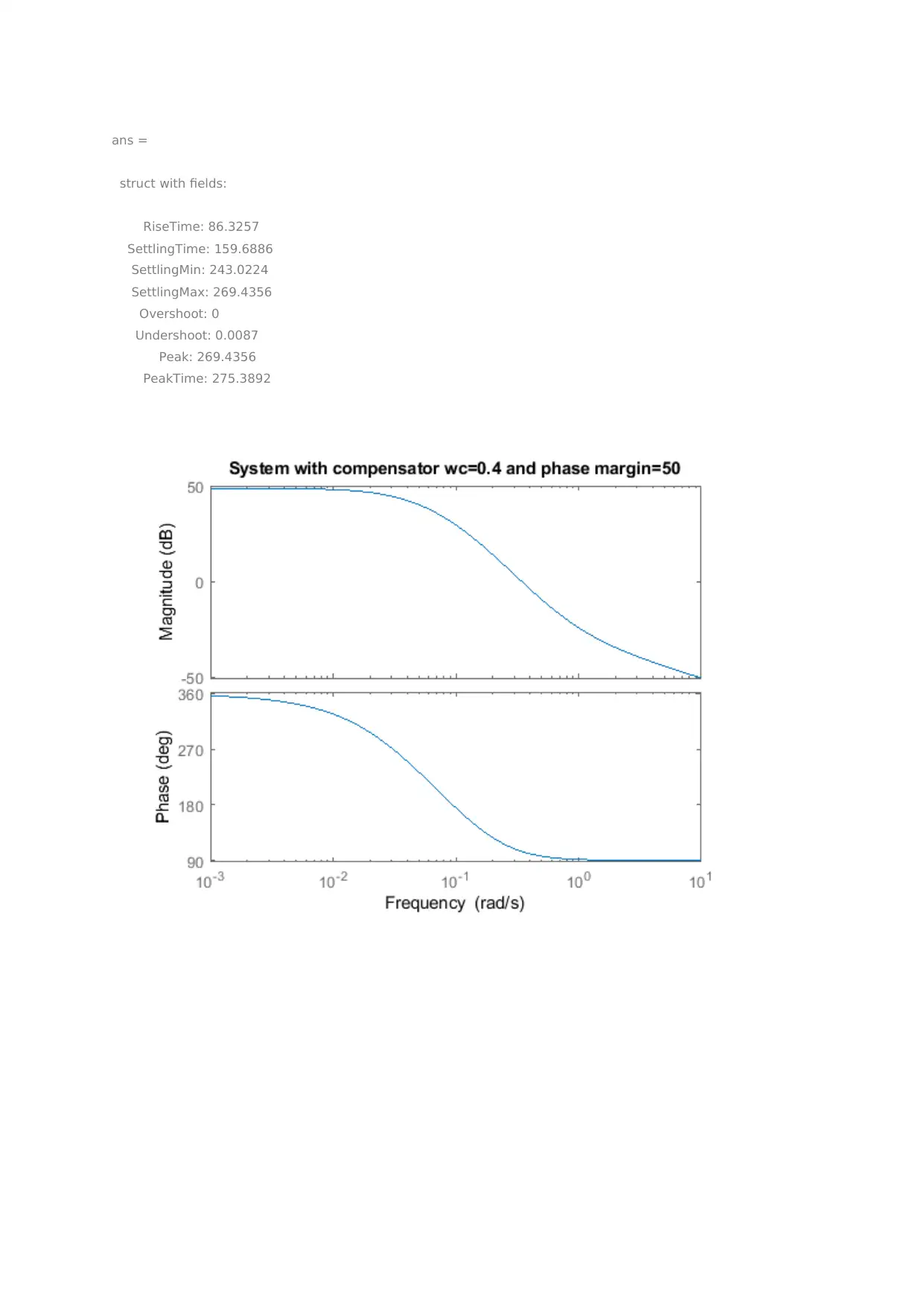
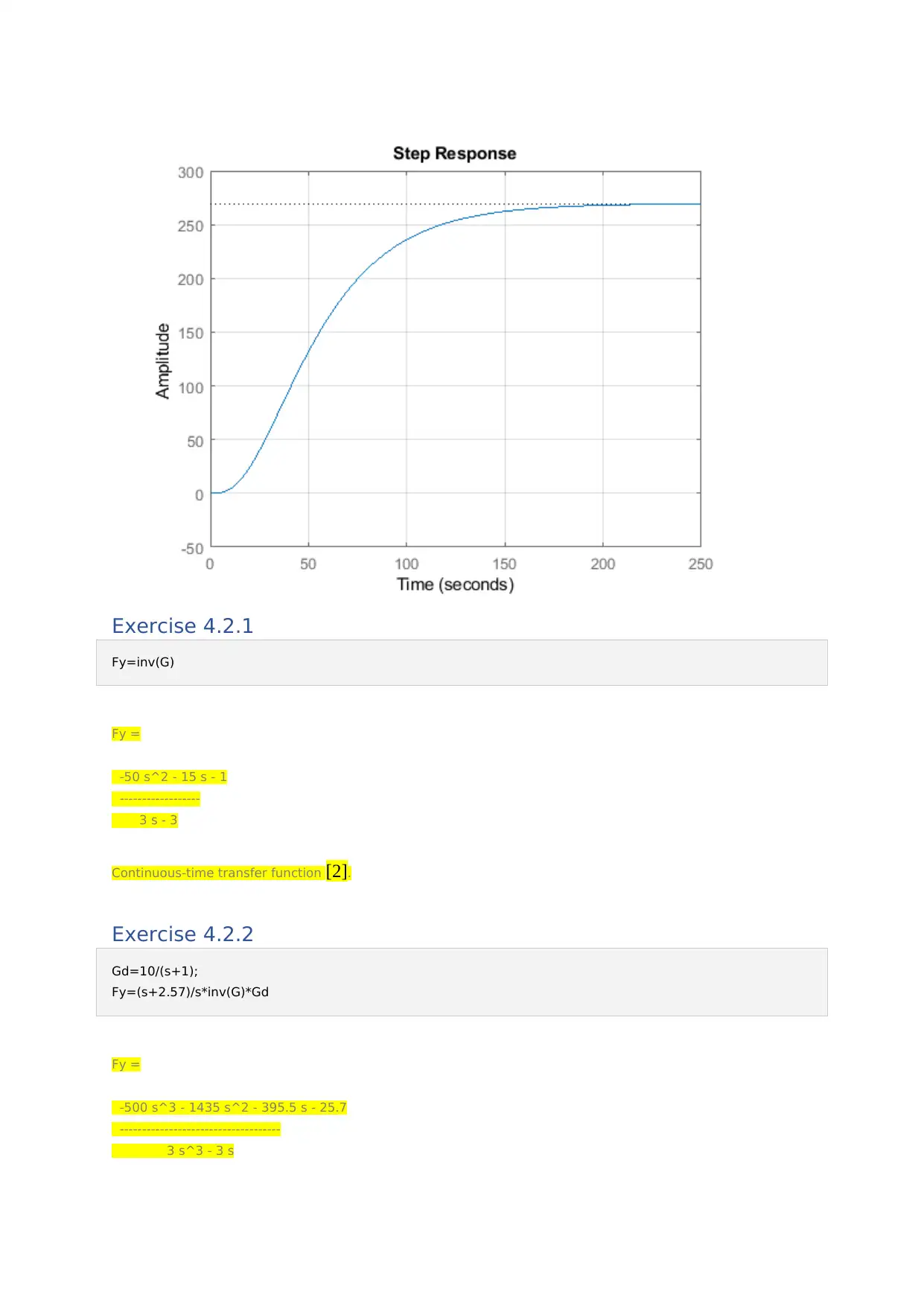
This assignment focuses on the design and analysis of lead-lag compensators within the context of advanced control theory. It includes exercises involving the implementation of lead-lag compensators to improve system transfer response, stability, and steady-state error. The solutions utilize MATLAB for simulation and analysis, demonstrating the impact of the compensators on system performance through Bode plots and step response analysis. Specific exercises cover the design of compensators to meet performance specifications, including desired closed-loop pole locations and phase margin requirements. The assignment also addresses frequency domain descriptions and loop-shaping techniques, referencing classical control design procedures. Desklib provides students access to similar assignments and study resources.
1 out of 14

Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.