Light Detecting Robot Project - IUM Engineering CE3 Report
VerifiedAdded on 2022/10/31
|8
|1608
|173
Report
AI Summary
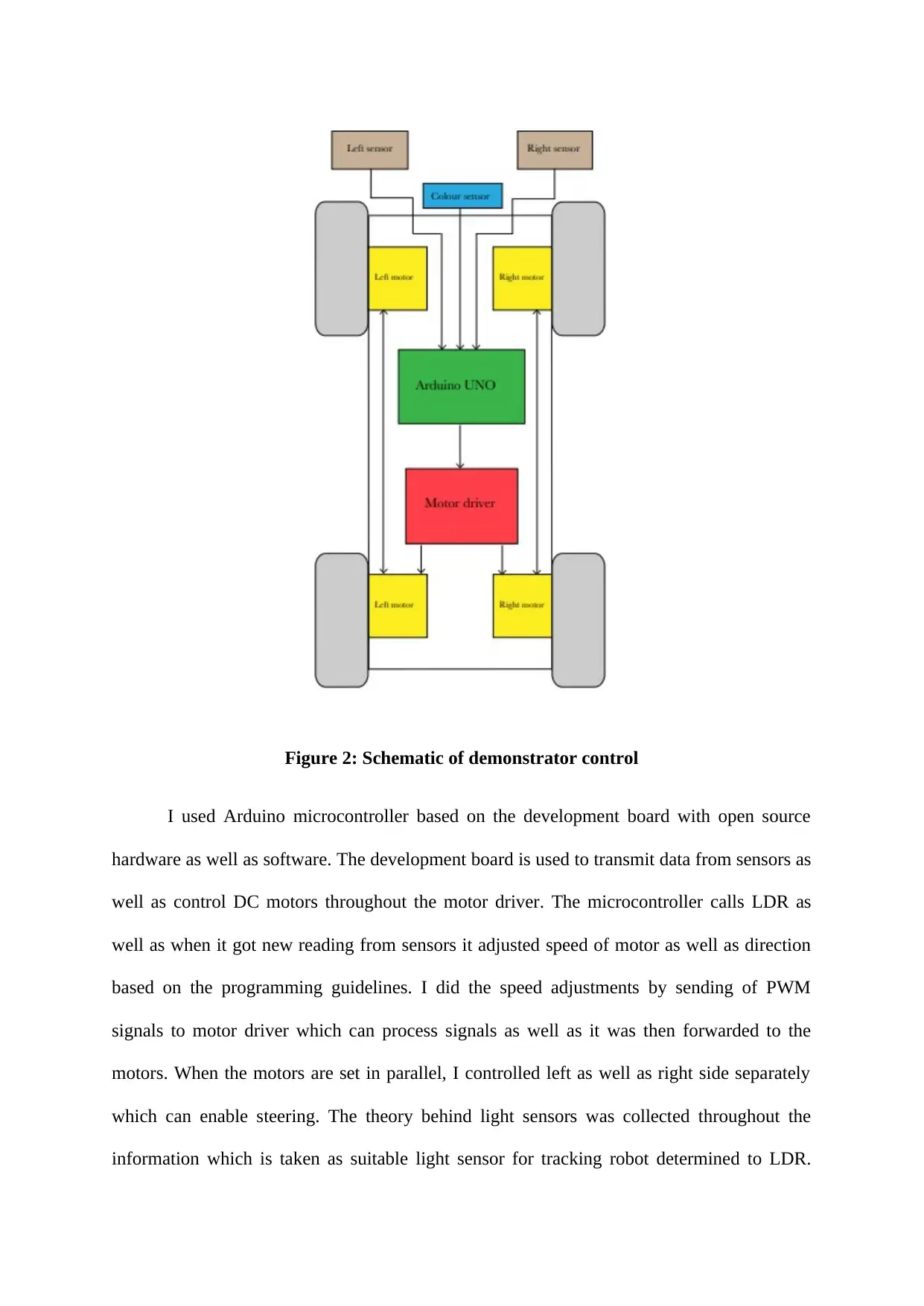
This report details a student's Career Episode 3 (CE3) project on a light-detecting robot, undertaken at the Islamic University Malaysia (IUM). The project involved designing and building a robot with four tires capable of detecting light sources and navigating towards them, utilizing an Arduino controller, LDR (Light Dependent Resistor) sensors, and ultrasonic sensors. The student, acting as the team leader, describes the project background, objectives, and their specific area of work, which included programming in C, implementing sensor systems, and utilizing leadership skills. The report highlights the engineering knowledge applied, including calculations of light intensity, and skills in assembling the robot. The student also identifies issues such as sensor calibration differences and proposes solutions such as using the demonstrator to steer based on light intensity and avoid obstacles based on color coding. The report concludes with a project overview, emphasizing the student's contribution to the project's success and the application of production engineering skills.
1 out of 8
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.