Solution for Linear Algebra Homework: Vectors and Quaternions Problems
VerifiedAdded on 2023/02/01
|4
|598
|20
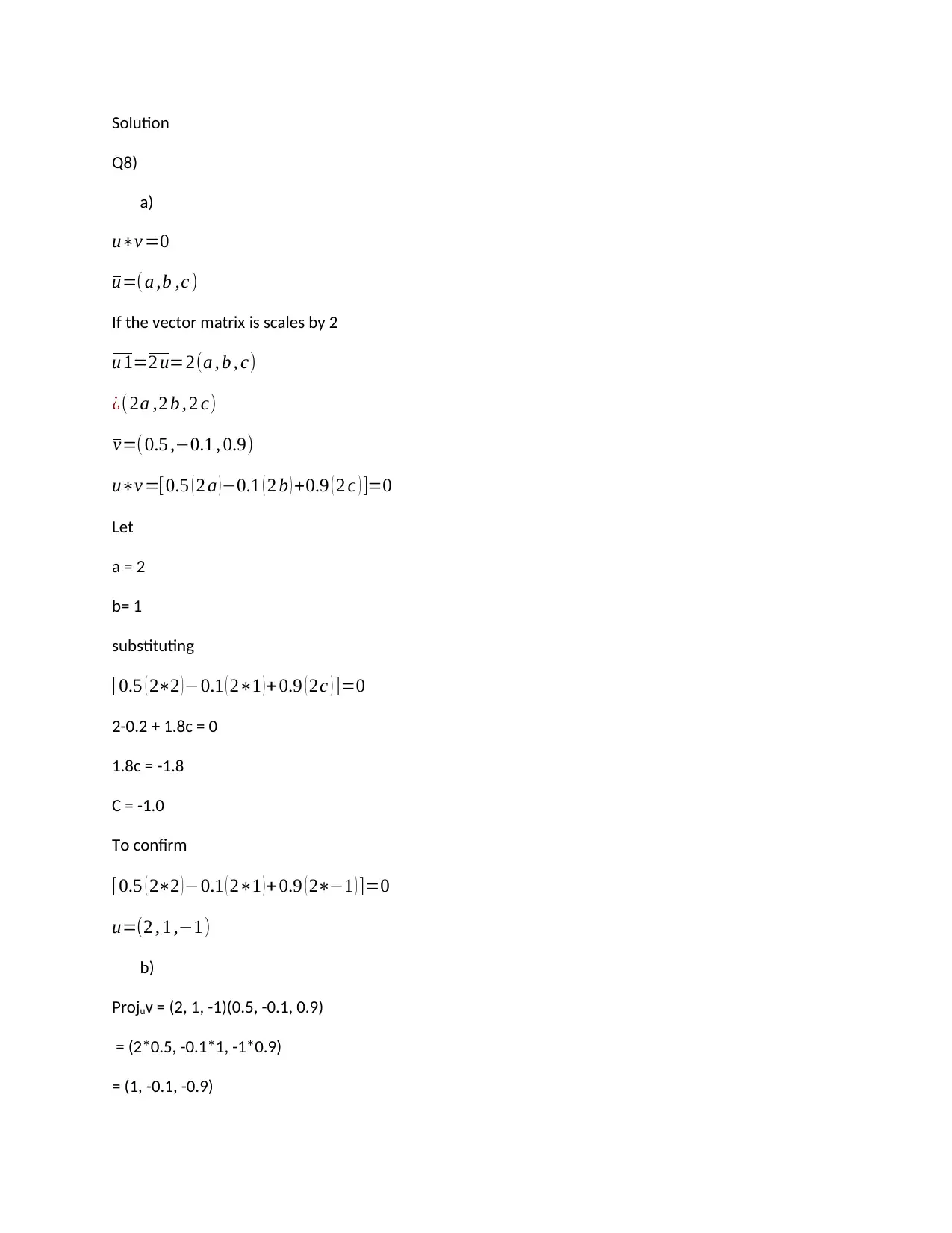
Homework Assignment
AI Summary
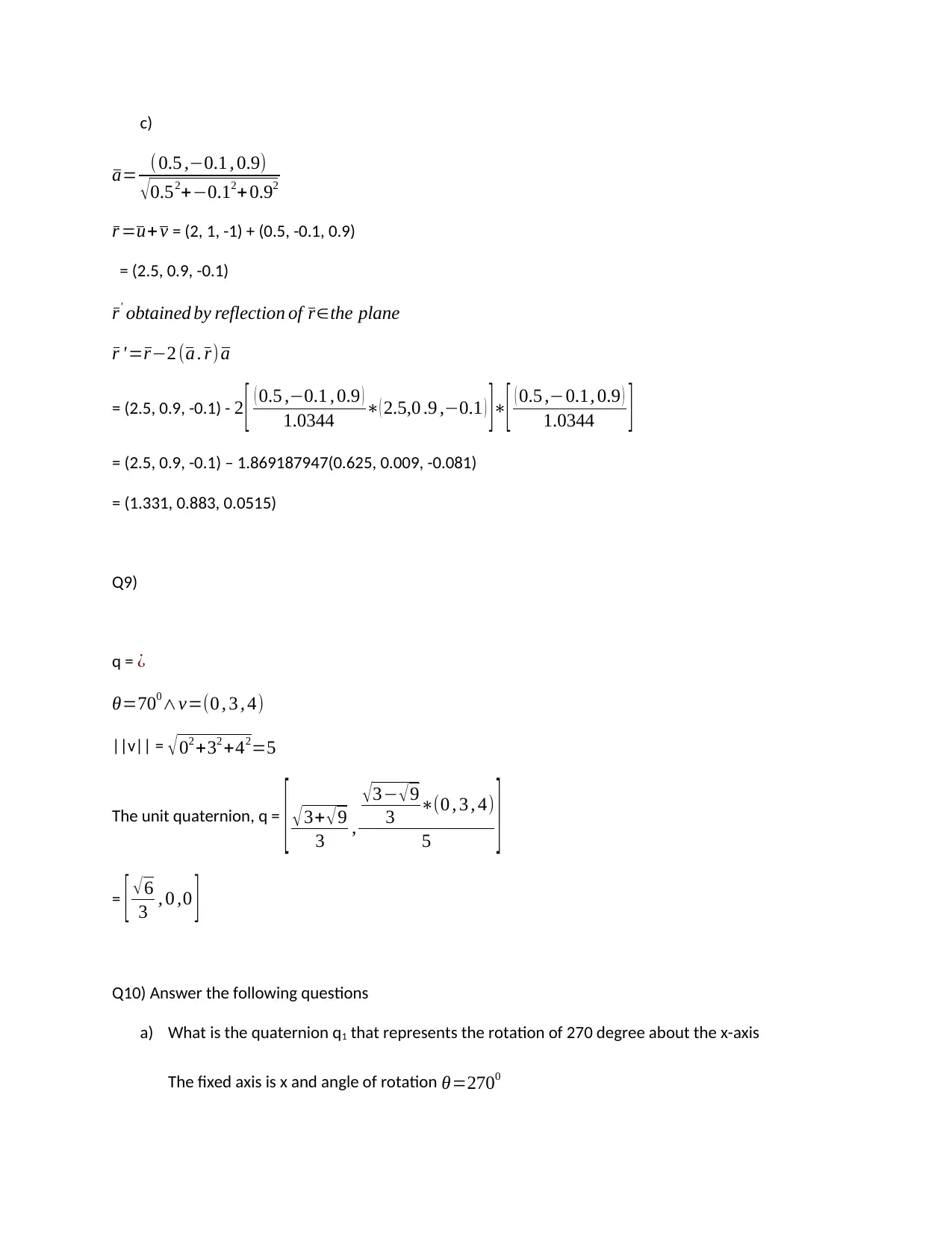
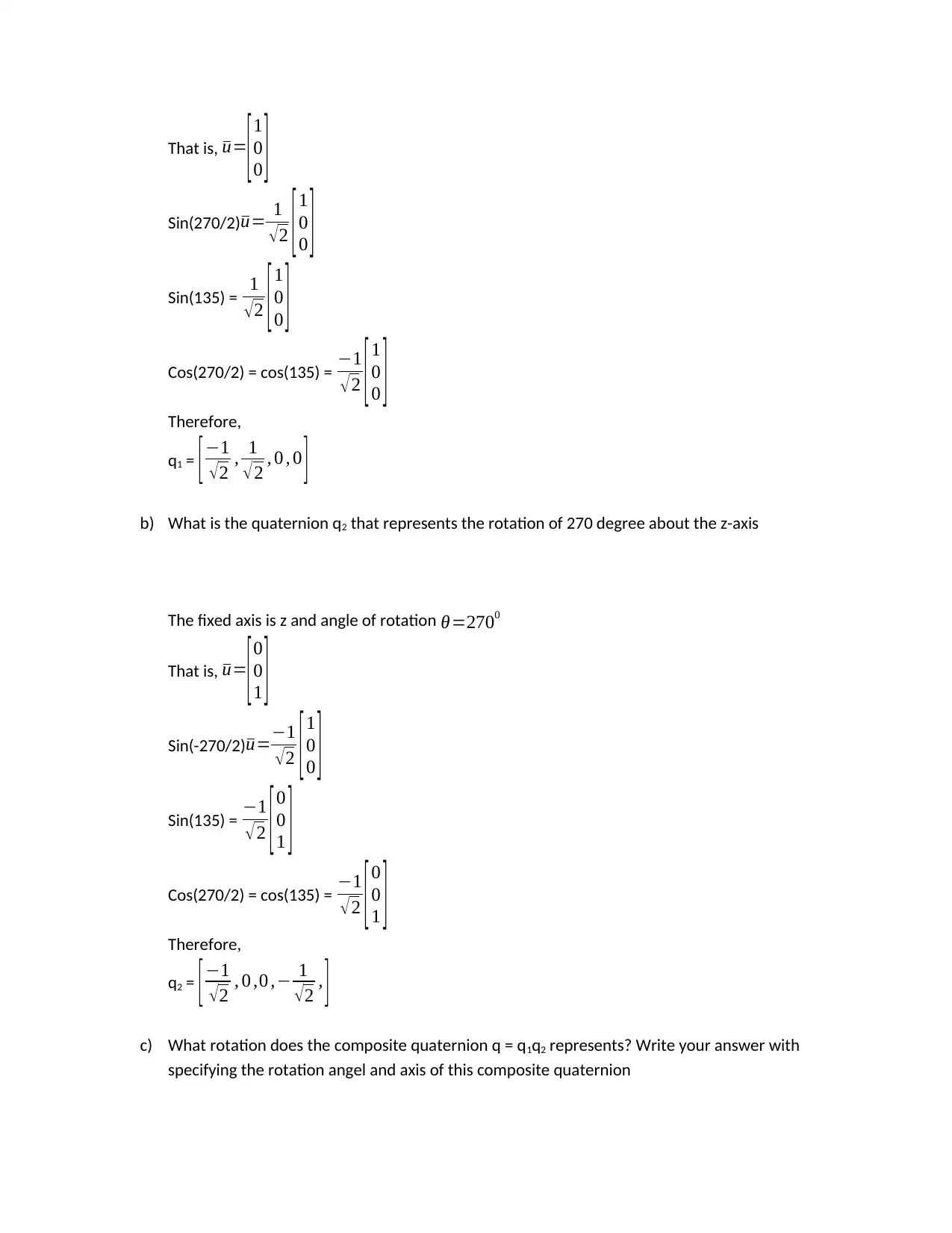
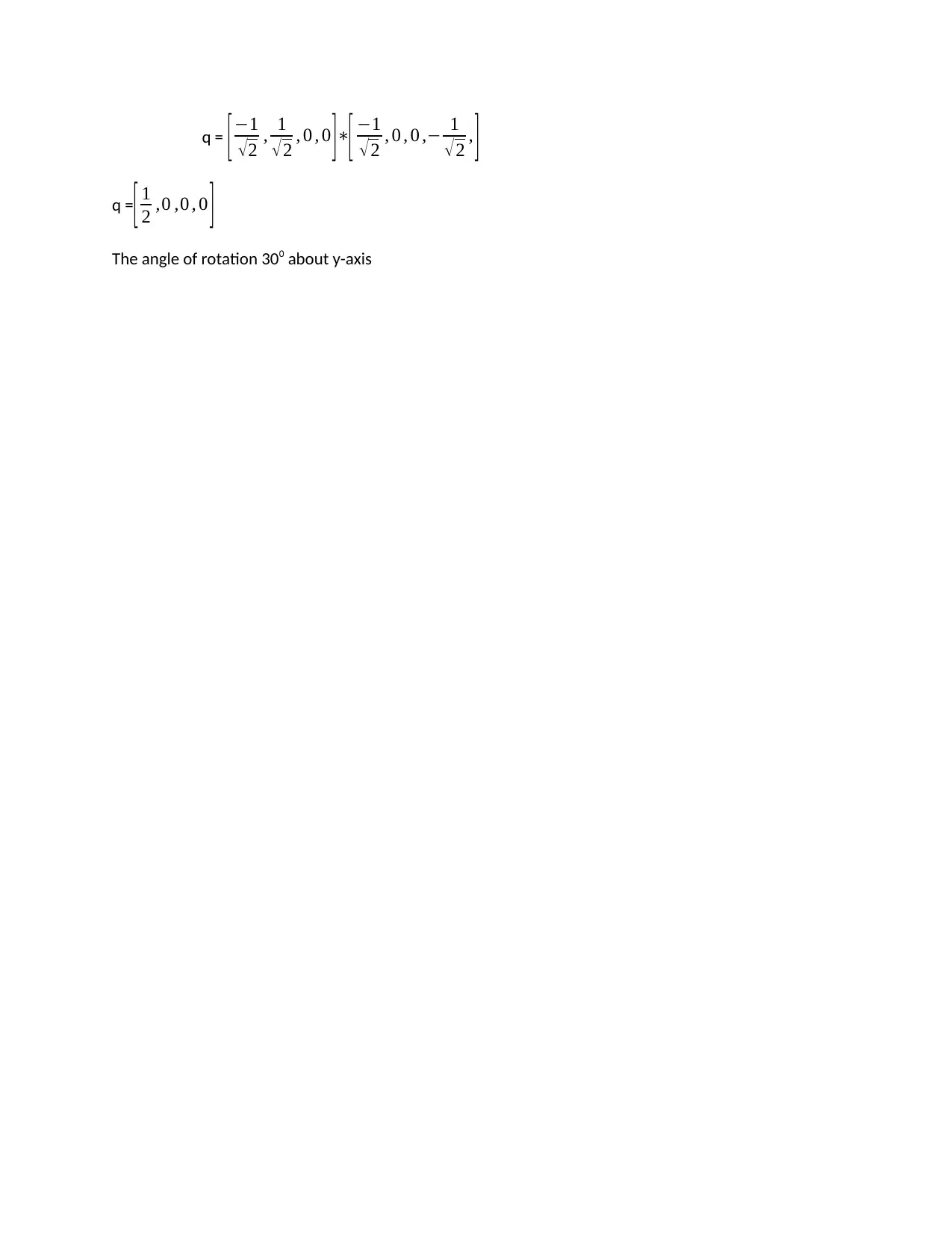
This document provides a detailed solution to a linear algebra homework assignment, focusing on vector operations and quaternion representations. The solution begins with calculating the scalar multiple of a vector to satisfy the dot product condition. It then proceeds to calculate the projection of one vector onto another, followed by the reflection of a vector in a plane. The assignment also delves into quaternions, including the calculation of a unit quaternion, and rotations represented by quaternions. The solution provides step-by-step calculations and explanations for each problem, including quaternion rotations about the x and z axes, and the composite quaternion representing the combined rotations, helping students understand and solve similar linear algebra problems.
1 out of 4
Related Documents




![MATH130: Algebra Assignment 2 Solution - [University Name] - May 2019](/_next/image/?url=https%3A%2F%2Fdesklib.com%2Fmedia%2Fimages%2Fmf%2Ff5e9dd638f934d7d8421c8edf334793d.jpg&w=256&q=75)

Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.