Linear Algebra (Math-244) Homework 1: Matrix Problems and Solutions
VerifiedAdded on 2022/09/12
|8
|685
|19
Homework Assignment
AI Summary
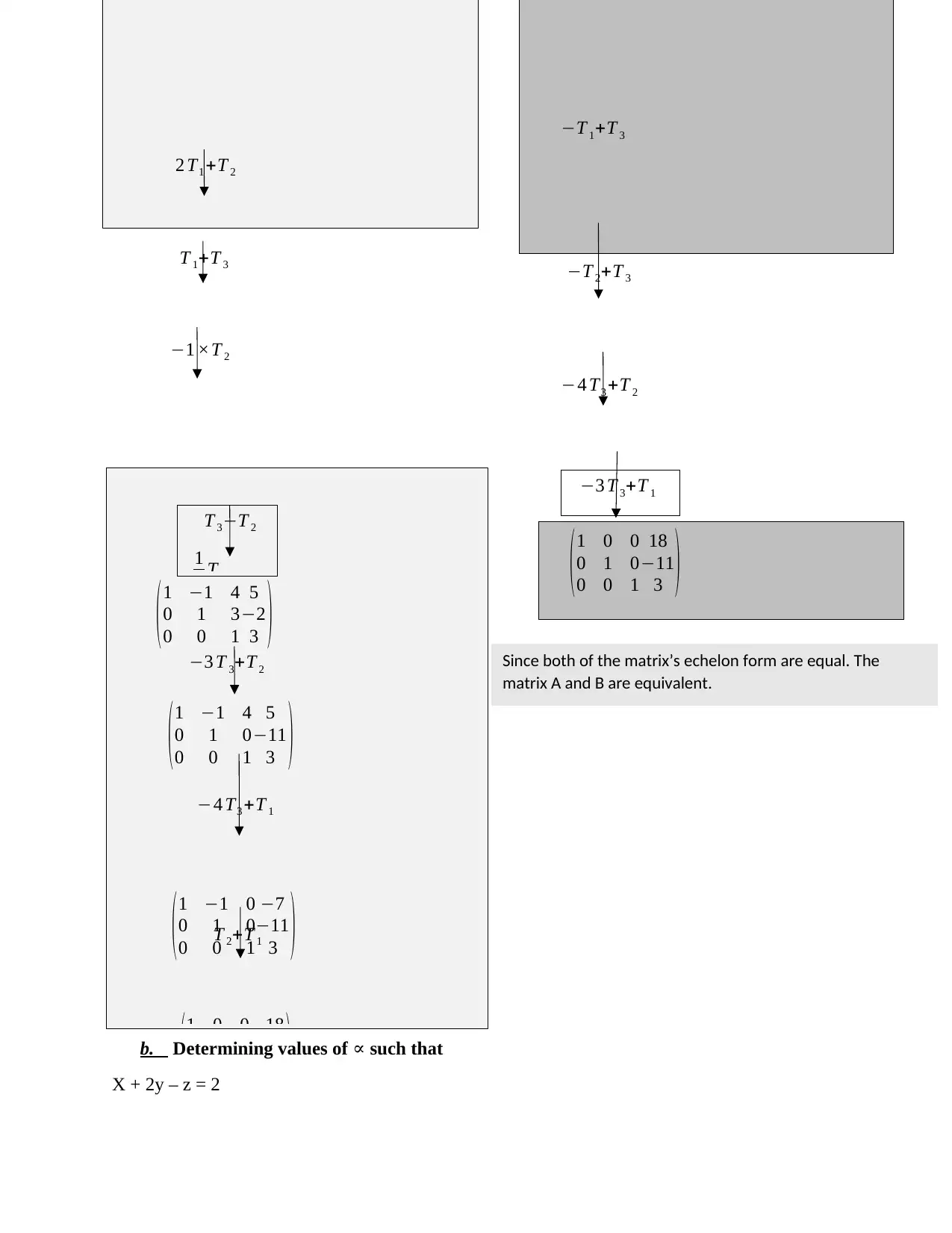
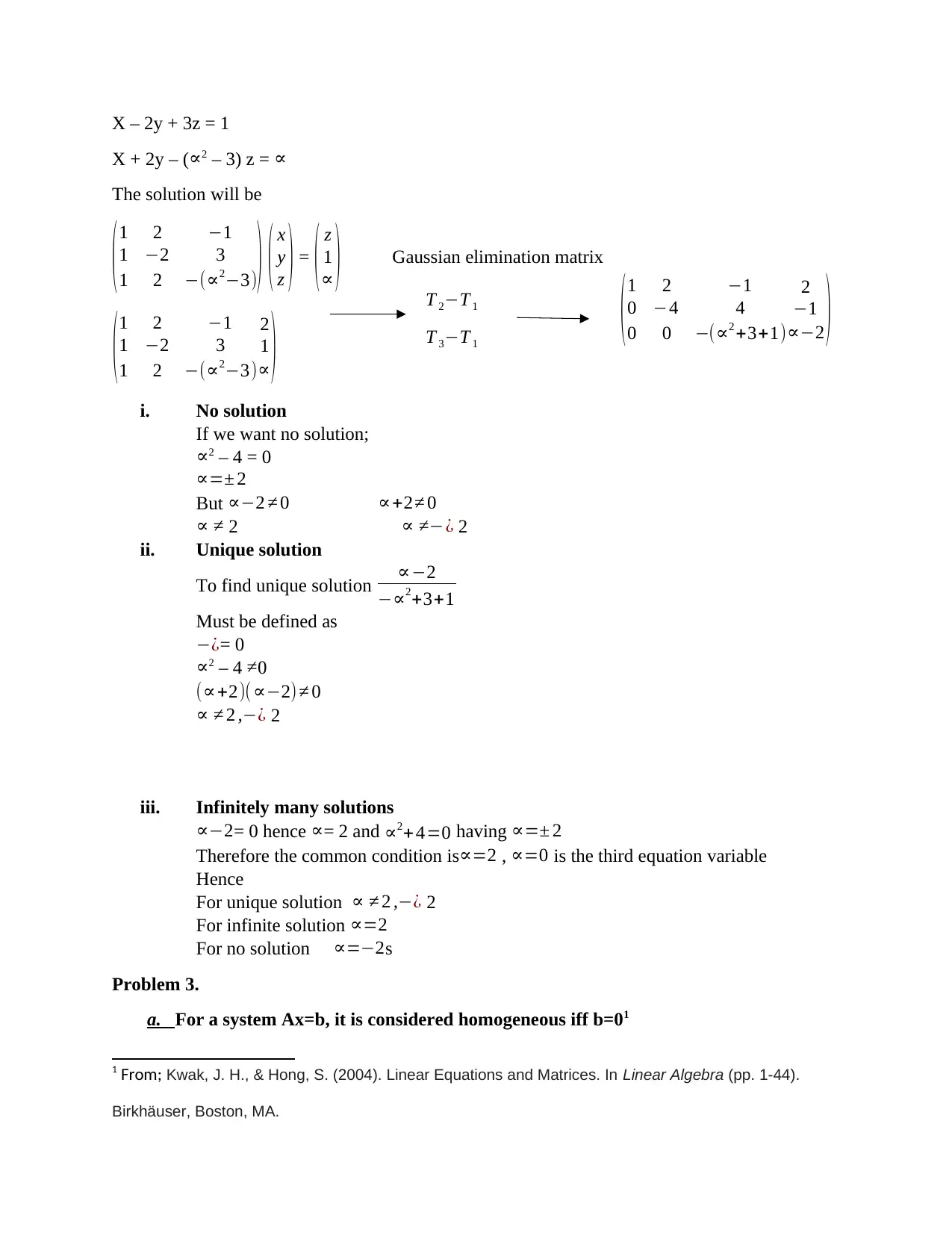
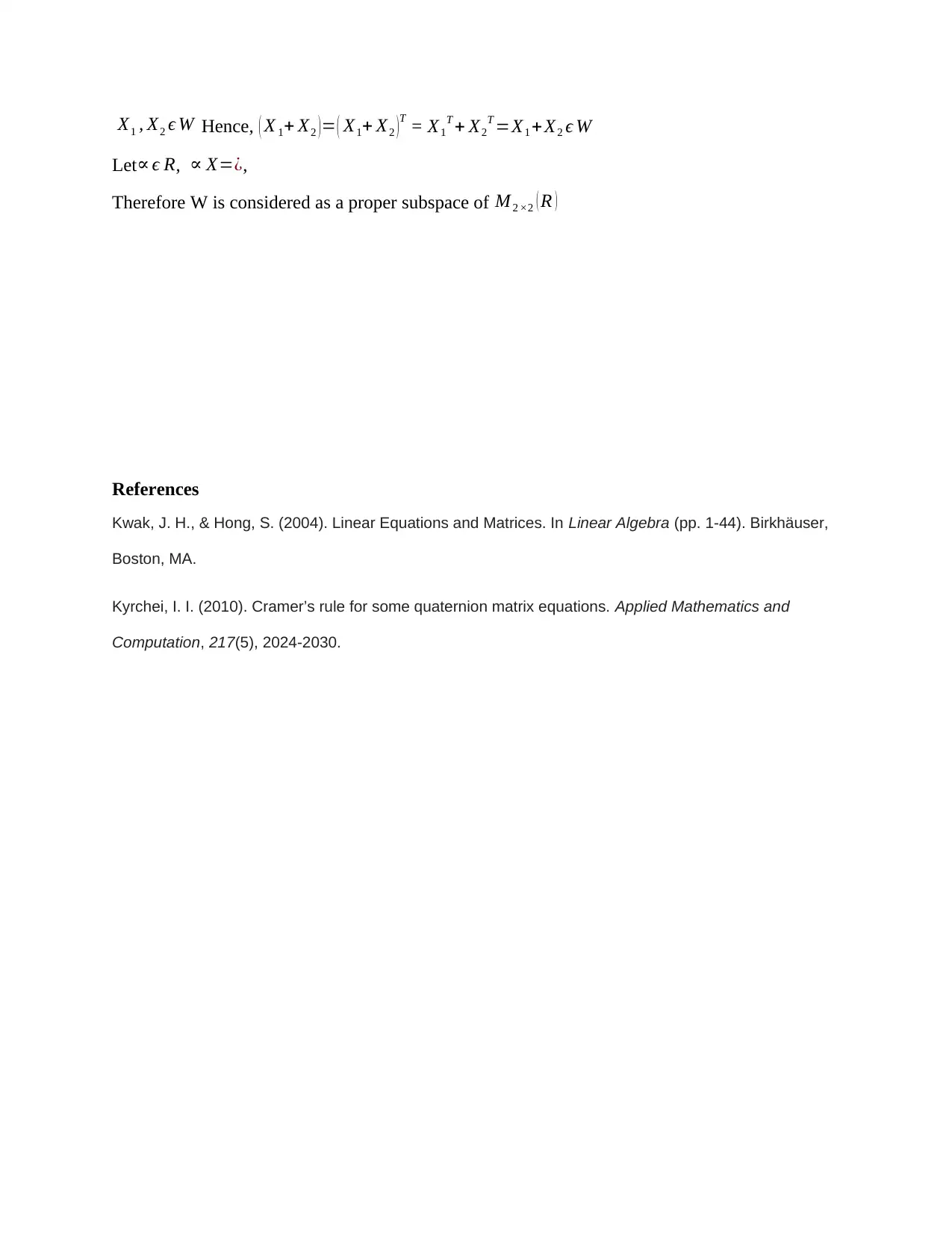
This document presents solutions to a Linear Algebra homework assignment, addressing problems related to matrix operations and linear algebra concepts. The solutions include finding values for matrix equations, calculating the adjoint and inverse of a matrix, demonstrating row equivalence between matrices, and determining the values for which a system of linear equations has unique, infinite, or no solutions. Furthermore, it explores vector subspaces, including finding bases and dimensions, and proves properties related to these subspaces. The solutions are detailed and demonstrate the application of linear algebra principles to solve the given problems. References to relevant linear algebra resources are also provided.





1 out of 8
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.