Linear Algebra, Calculus, and Probability Solutions
VerifiedAdded on 2022/11/19
|12
|1439
|328
Homework Assignment
AI Summary
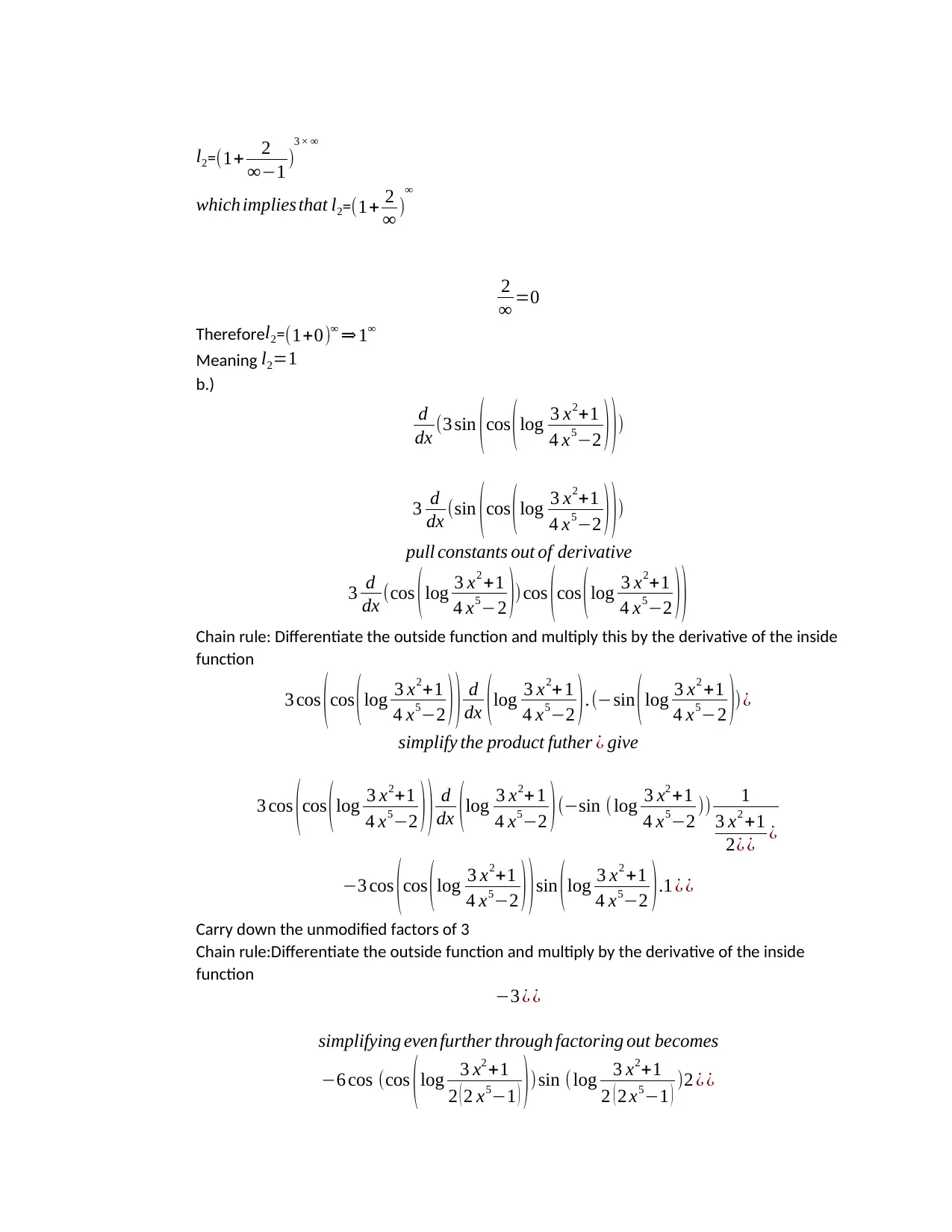
This document provides comprehensive solutions to a linear algebra assignment, addressing key concepts such as matrix algebra, including rank, determinants, and eigenvalues. The solution explores linear independence, field properties, and vector spaces. It also covers calculus problems involving limits, derivatives, and the chain rule, along with probability theory questions focusing on probability density functions, cumulative distribution functions, expectation, and variance. The assignment includes detailed explanations and calculations, offering a thorough understanding of the core principles in each area. The document provides a complete solution to the given assignment.






1 out of 12
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.