University XYZ: Linear Systems and Control Assignment Solution
VerifiedAdded on 2020/05/11
|9
|525
|147
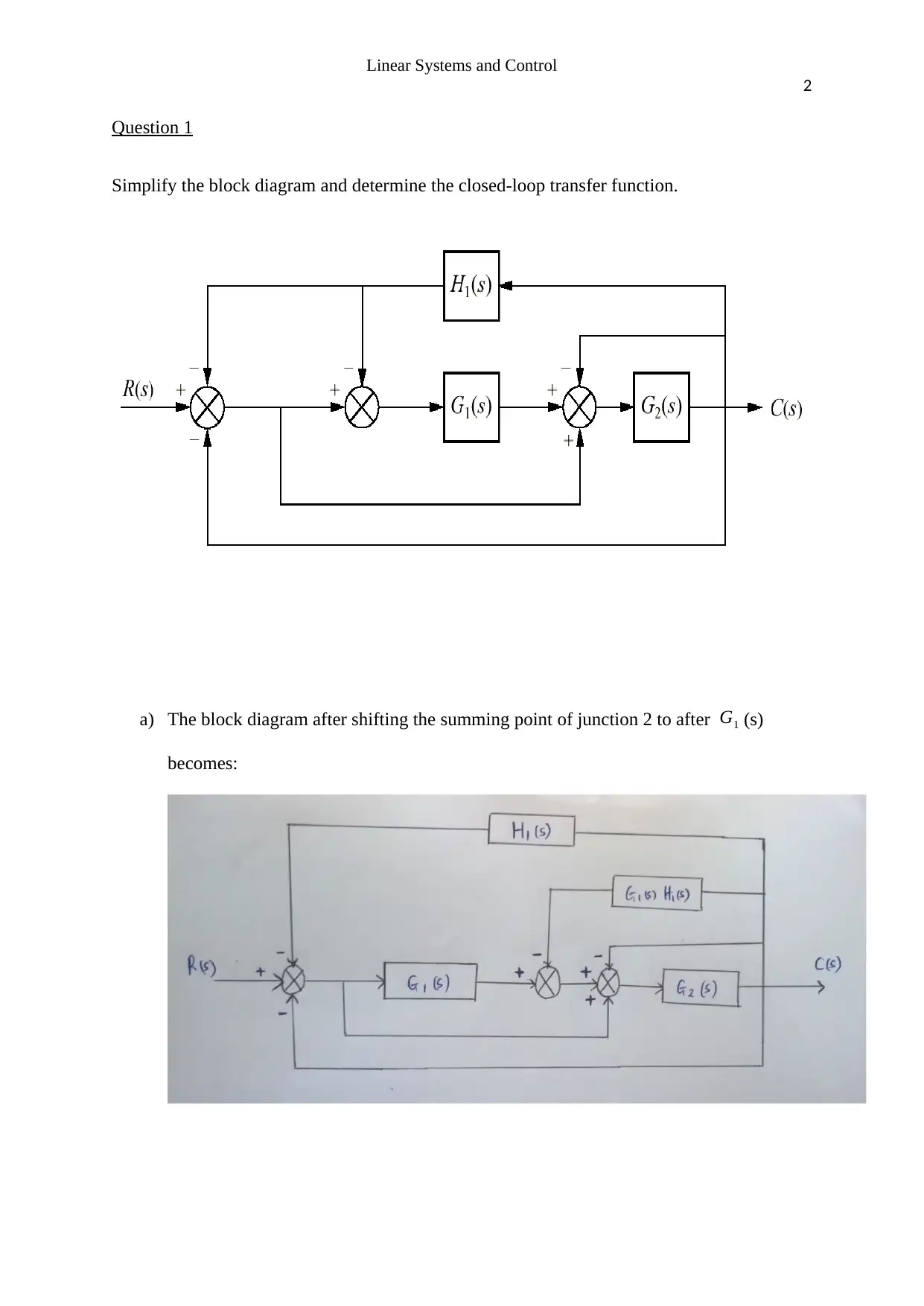
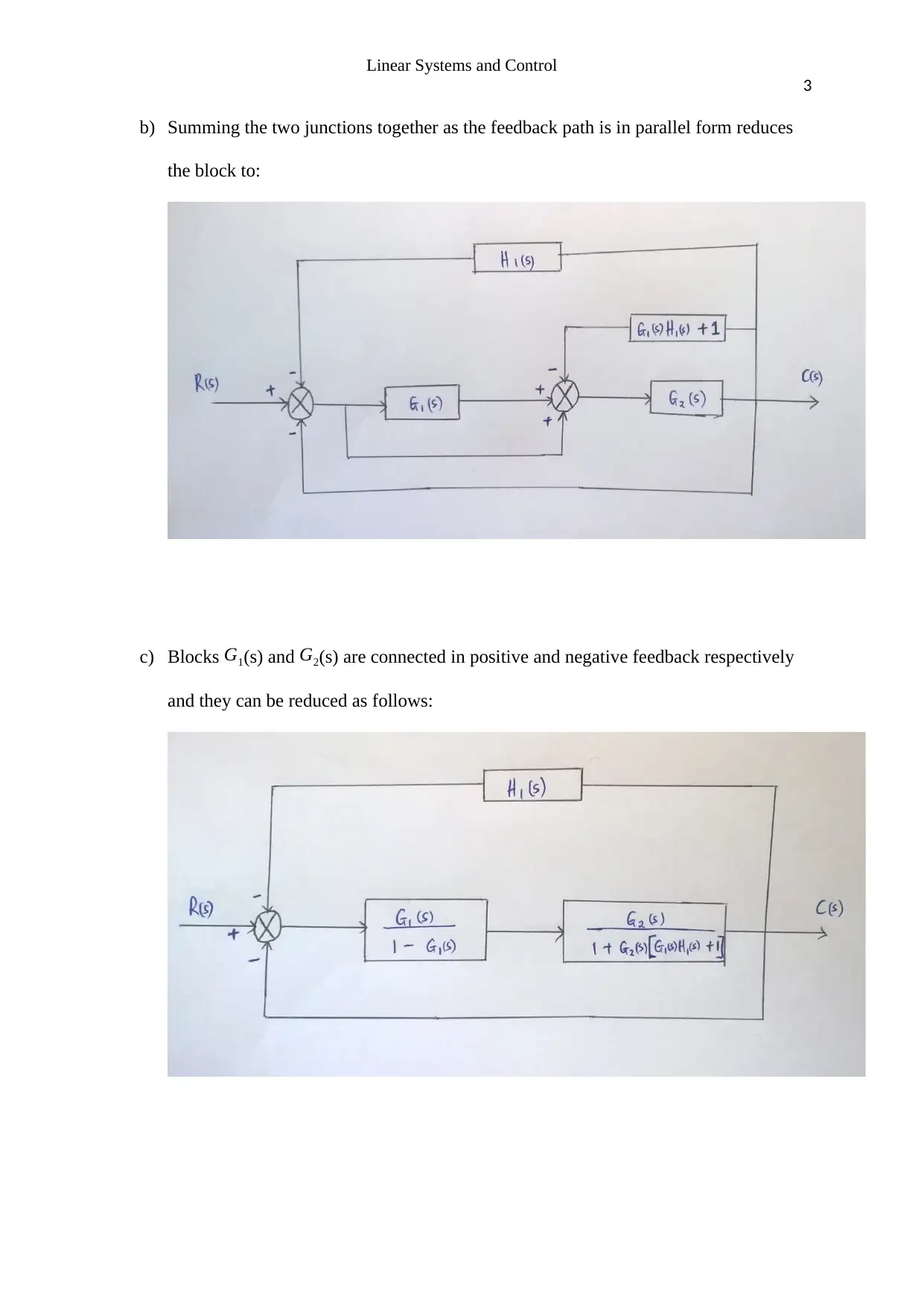
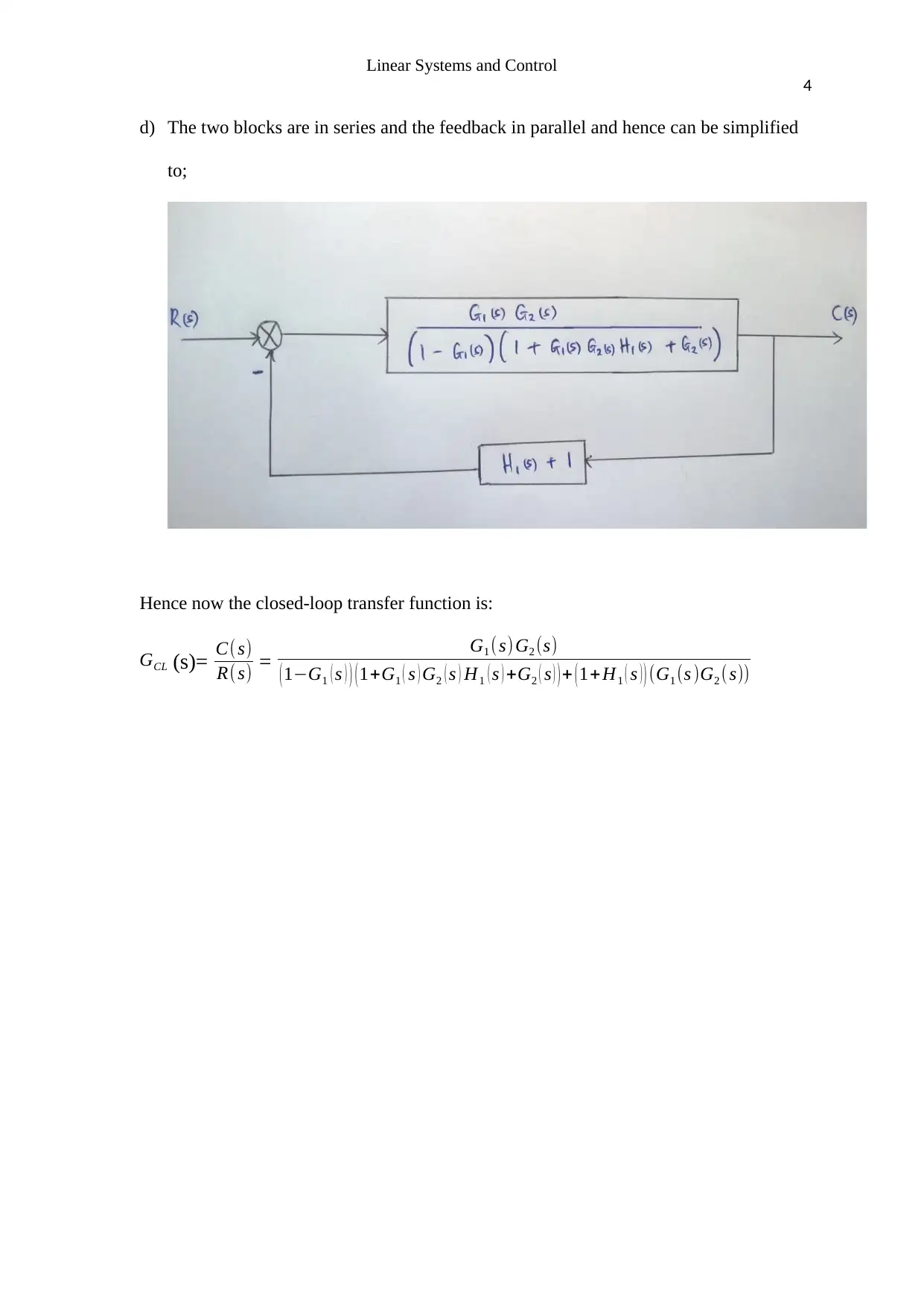
Homework Assignment
AI Summary
This assignment solution covers key concepts in linear systems and control. It begins by simplifying a block diagram and determining the closed-loop transfer function. The solution then applies the Routh-Hurwitz criterion to find the range of K for a stable unit feedback system. Bode plots are generated using MATLAB for a given transfer function, and the gain and phase margins are determined. Finally, the assignment calculates steady-state errors for unit step and ramp inputs, and suggests the use of a PI controller to improve these errors. The solution references relevant literature, providing a comprehensive understanding of the topics covered. The assignment covers topics such as transfer functions, stability analysis, and controller design, making it a valuable resource for students studying control systems.

1 out of 9
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.