University Project: Mechanical Engineering LMI System Report Analysis
VerifiedAdded on 2022/09/12
|8
|1893
|10
Report
AI Summary
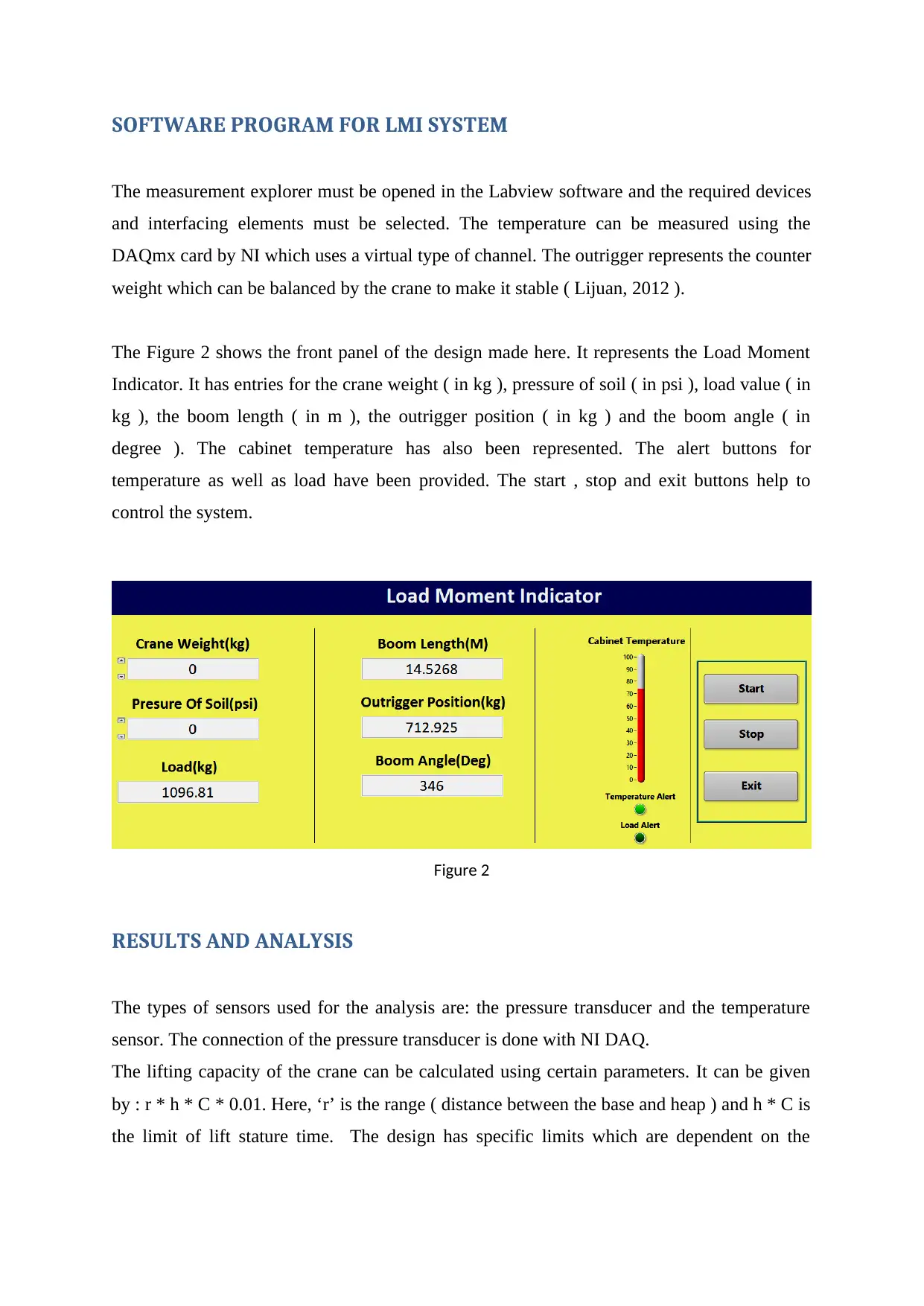
This report presents a comprehensive analysis of a Load Moment Indicator (LMI) system, crucial for enhancing crane safety and operational efficiency. The introduction highlights the importance of LMI systems in preventing accidents by monitoring load and arm moments. The design section details the system's components, including input sensors (pressure and angle sensors), a control unit, and output devices, with Labview software used for simulation. The software program's functionality is explained, and the results and analysis section covers sensor types and calculations for crane lifting capacity. Furthermore, the report evaluates signal conditioning elements and proposes future developments, such as low-cost controllers and wireless data transmission methods, including the potential of IoT and Virtual Reality. The report concludes with references supporting the analysis.

1 out of 8
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.