MAR8067 Marine Machinery Systems: Analyzing and Stabilizing Systems
VerifiedAdded on 2023/04/23
|12
|1473
|163
Report
AI Summary
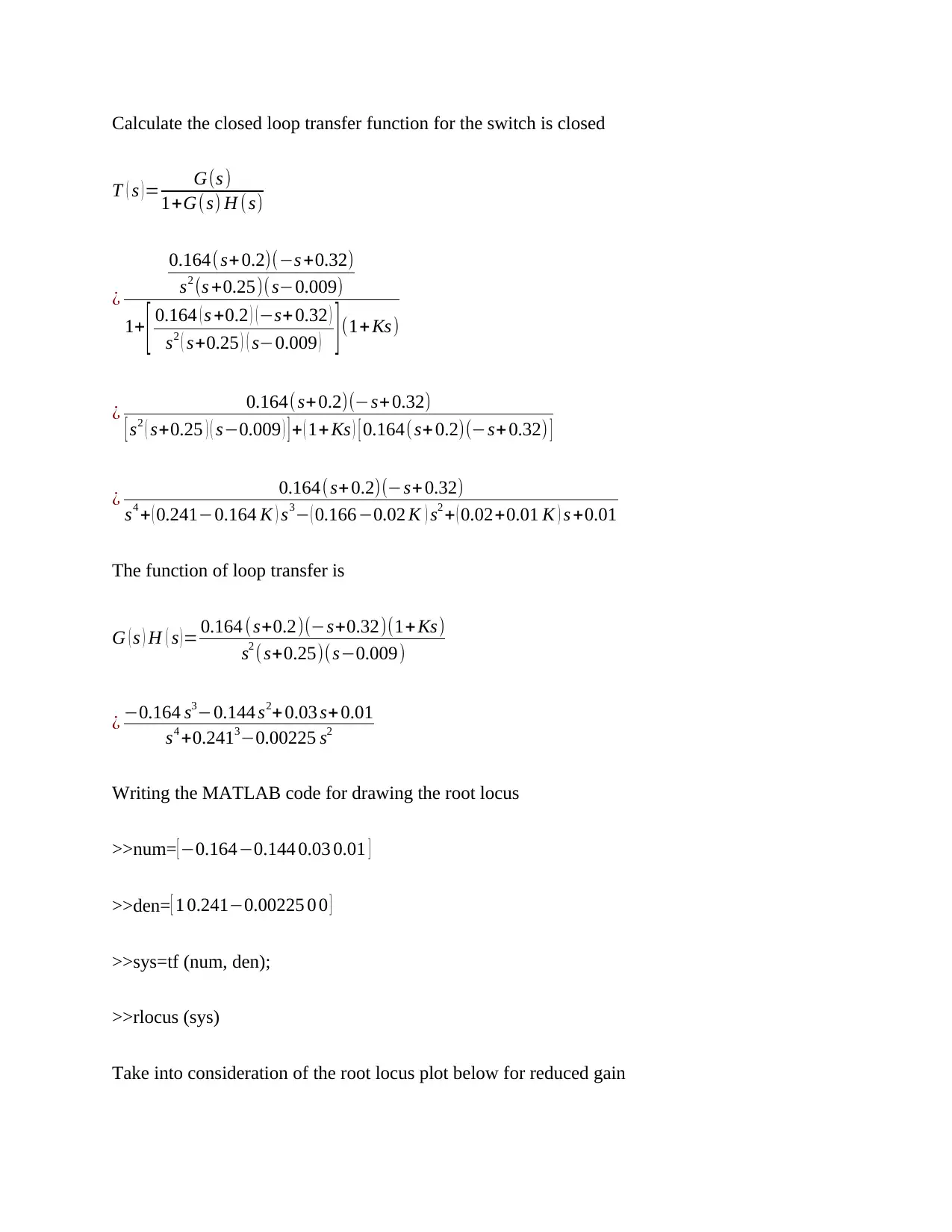
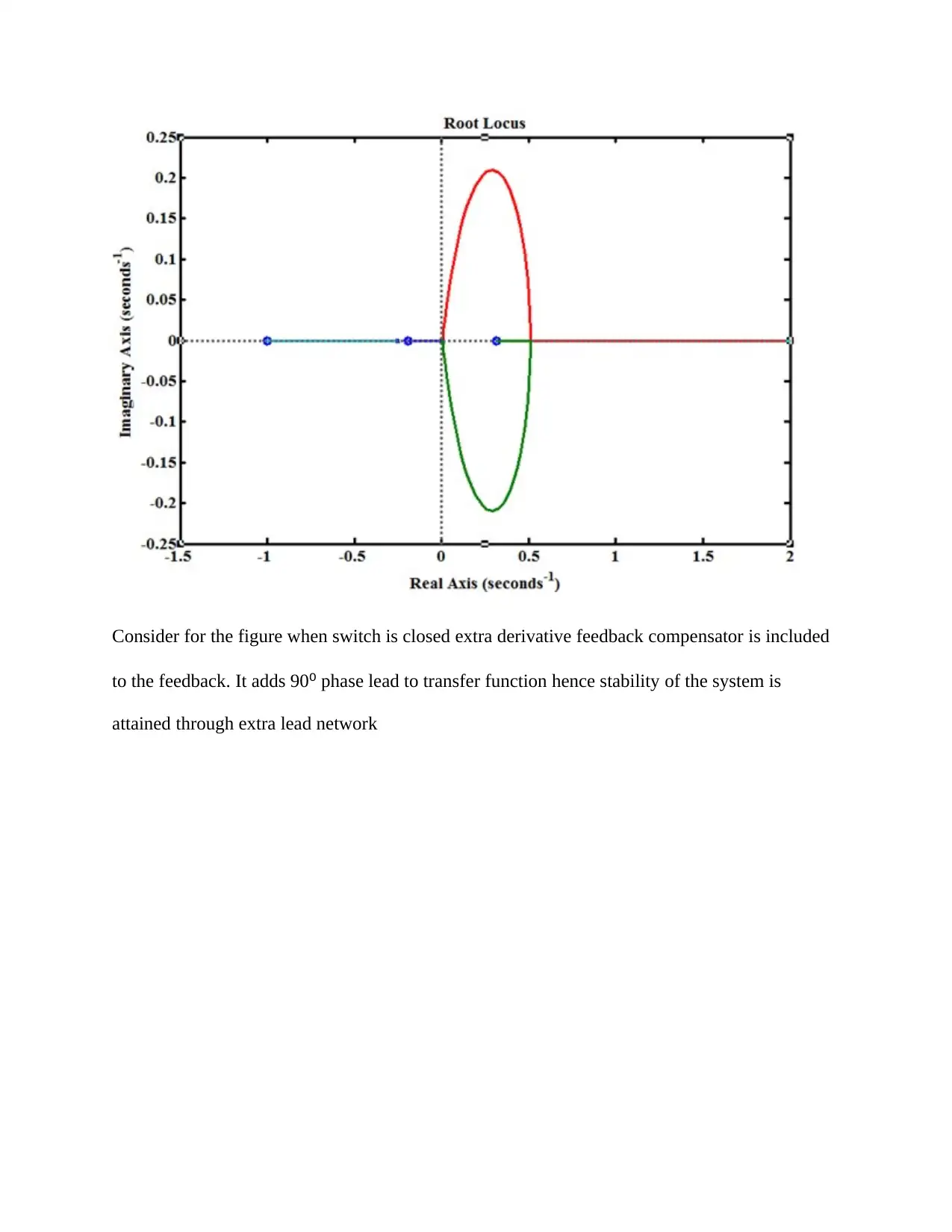
This report provides a detailed analysis of marine machinery systems, focusing on closed-loop systems and stability analysis. It begins with determining the closed-loop block diagram and transfer function for a hydraulic servomechanism with mechanical feedback. The report then analyzes the stability of a given system using Bode plots, pole-zero maps, and root locus techniques, concluding that the system is unstable. Furthermore, it explores methods to stabilize the system, including the use of proportional feedback compensators, and discusses the design and implementation of appropriate feedback controllers. The report includes MATLAB code snippets and relevant plots to support the analysis and findings. Desklib offers a wealth of similar solved assignments for students.

1 out of 12
Related Documents





Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.