MATLAB Assignment: Circuit Analysis, System Response, and Modeling
VerifiedAdded on 2023/06/14
|17
|2805
|311
Homework Assignment
AI Summary
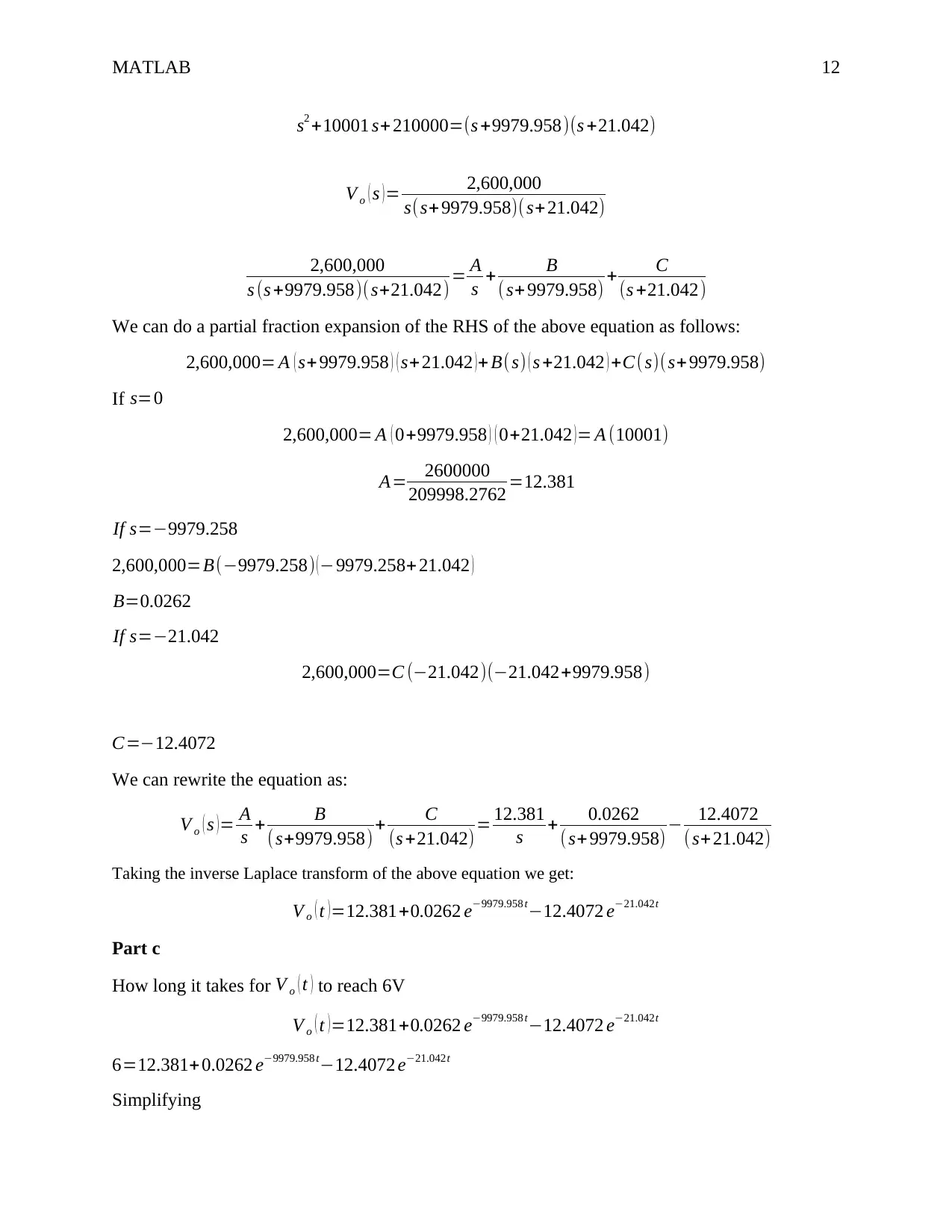
This document presents a solved MATLAB assignment focusing on electrical engineering problems. The assignment includes problems involving Laplace transforms, system modeling, and circuit analysis. Specific topics covered are solving differential equations using Laplace transforms and MATLAB, analyzing transfer functions, and modeling mechanical systems using free body diagrams and transfer functions. The solutions are verified using MATLAB code, and the document includes plots of system responses and Bode plots. The assignment also covers circuit analysis using Kirchhoff's laws and solving for time-domain responses. Desklib provides additional resources such as past papers and solved assignments to aid students in their studies.



1 out of 17
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.