University Application of Computing Coursework Assignment
VerifiedAdded on 2023/01/17
|10
|1458
|83
Homework Assignment
AI Summary
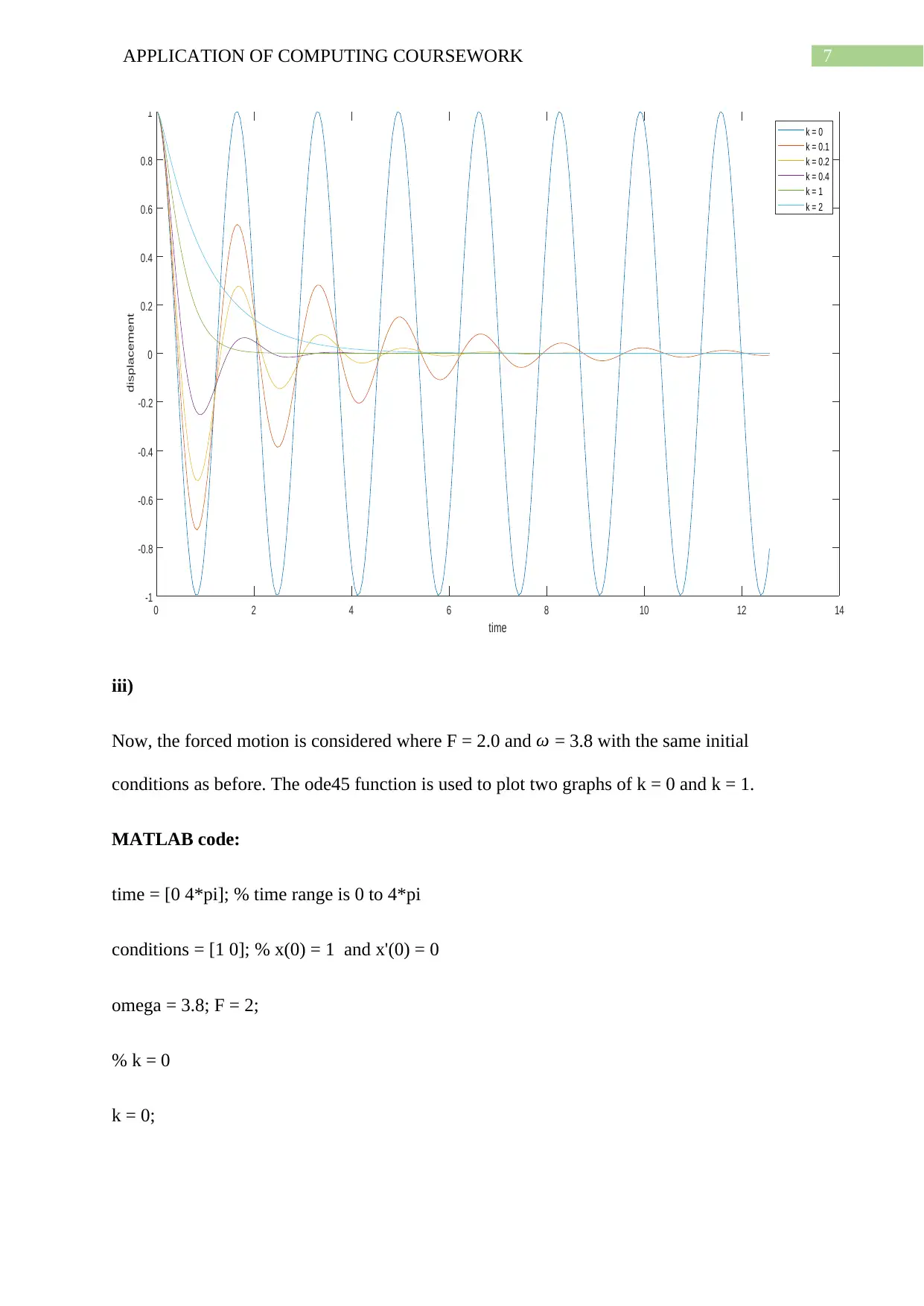
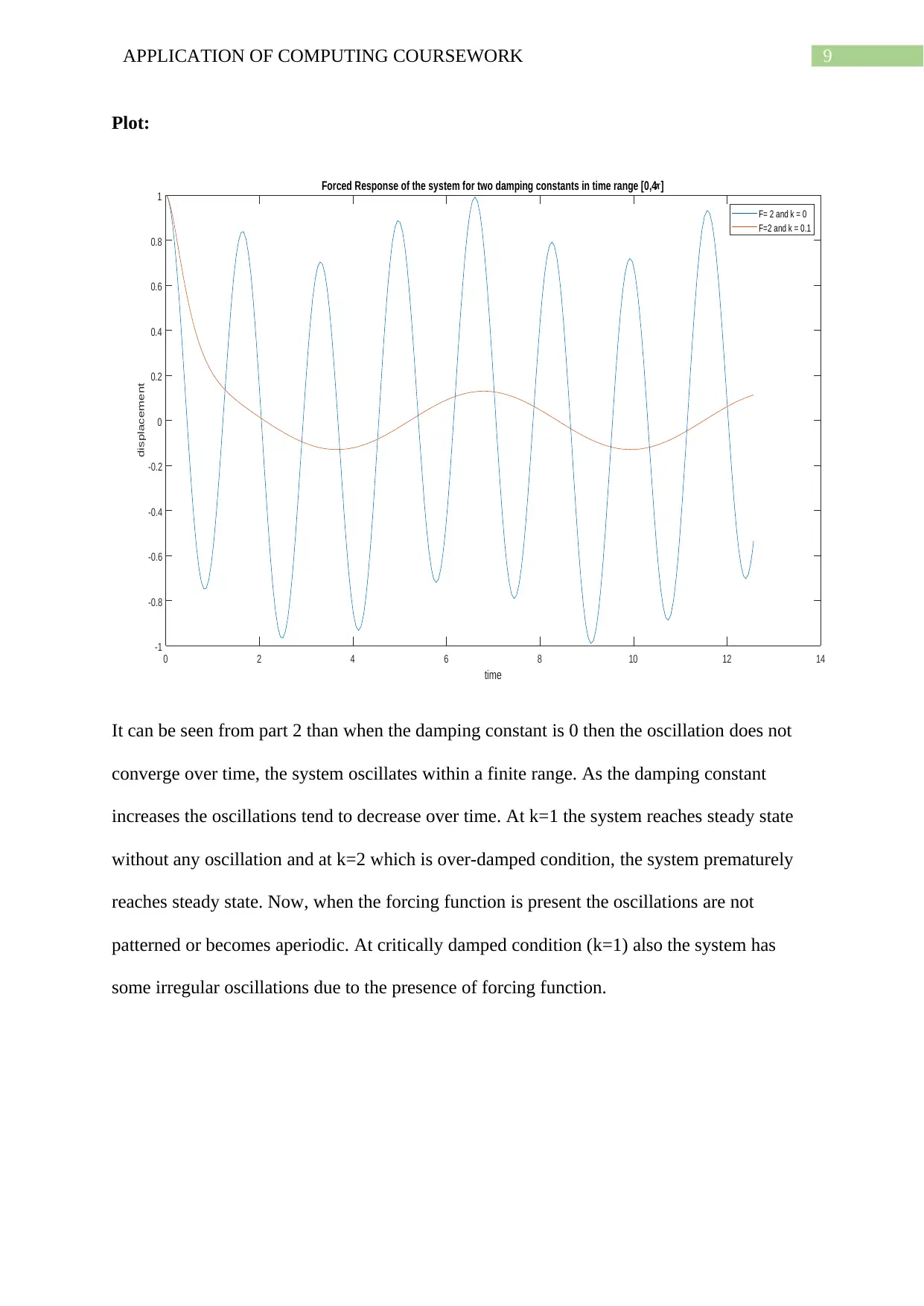
This document presents a complete solution to a computing coursework assignment. The assignment involves two main problems. The first problem requires the computation and analysis of Fibonacci numbers using MATLAB. It includes generating Fibonacci numbers, calculating the ratio of consecutive numbers, plotting the ratio, and determining the smallest value of n for a specified accuracy of the golden mean. The second problem focuses on a mass-spring system subject to damping and a periodic force. It involves solving a differential equation using MATLAB's ode45 function, plotting the system's response for different damping constants, and analyzing the effects of damping on the system's behavior under both unforced and forced conditions. The solution includes MATLAB code, plots, and detailed explanations of the results, demonstrating the application of computing principles to solve engineering problems.

1 out of 10
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.