2018 Computer Application for Mechanical Engineering MATLAB Solutions
VerifiedAdded on 2023/06/10
|7
|1116
|482
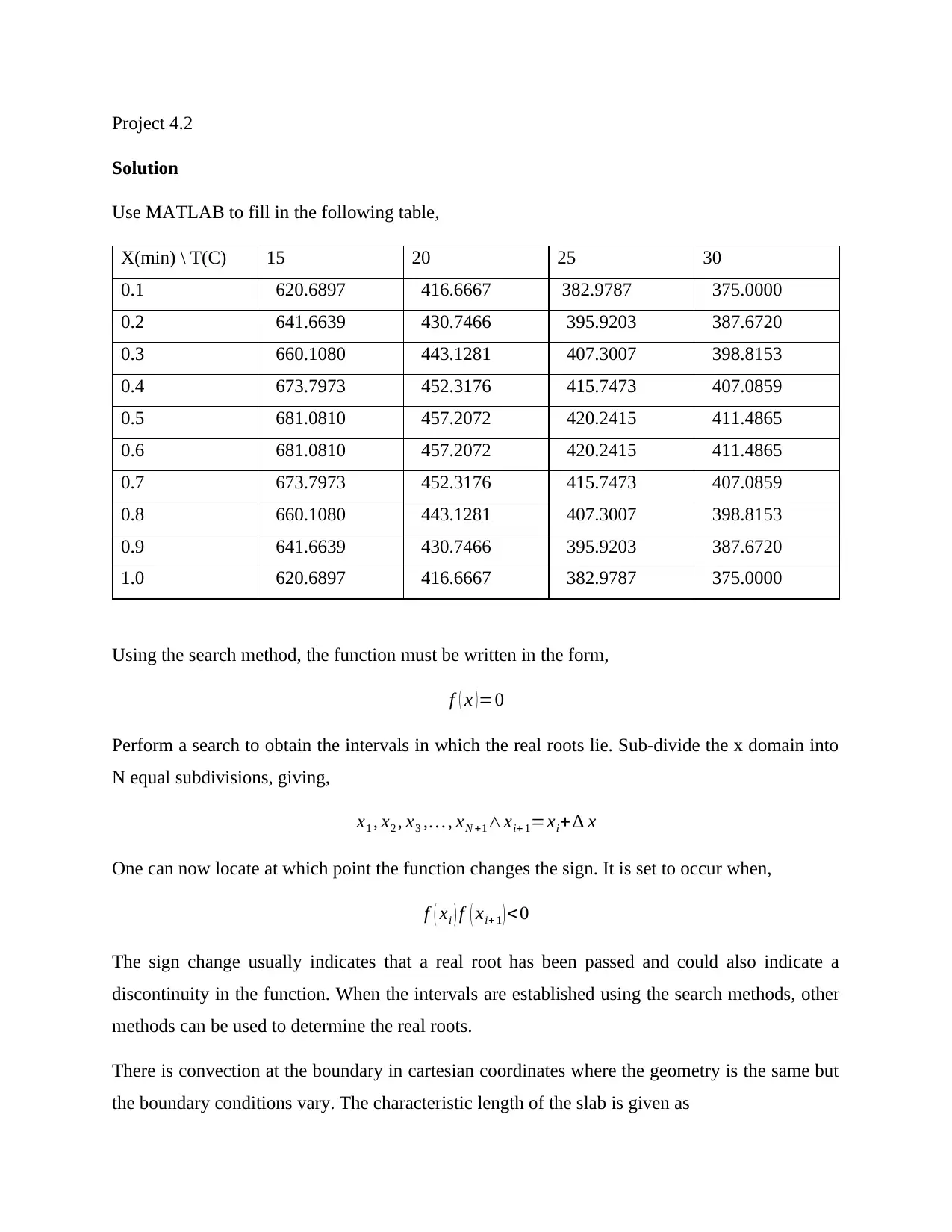
Homework Assignment
AI Summary
This document presents MATLAB solutions for two mechanical engineering problems. The first problem involves filling a table using MATLAB, related to heat transfer, and discusses using search methods to find real roots of a function, along with convection boundary conditions in Cartesian coordinates. It includes a MATLAB script for temperature simulation. The second problem uses MATLAB's ODE45 solver to determine the trajectory of a projectile with drag, providing equations of motion and initial conditions, and includes a MATLAB script to solve the differential equations and generate a plot of the projectile's motion. Desklib offers many such assignments and study tools.



1 out of 7
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.