EE472 Lab Report: Modeling Dynamic Systems in Matlab and Simulink
VerifiedAdded on 2022/09/01
|14
|1784
|28
Report
AI Summary
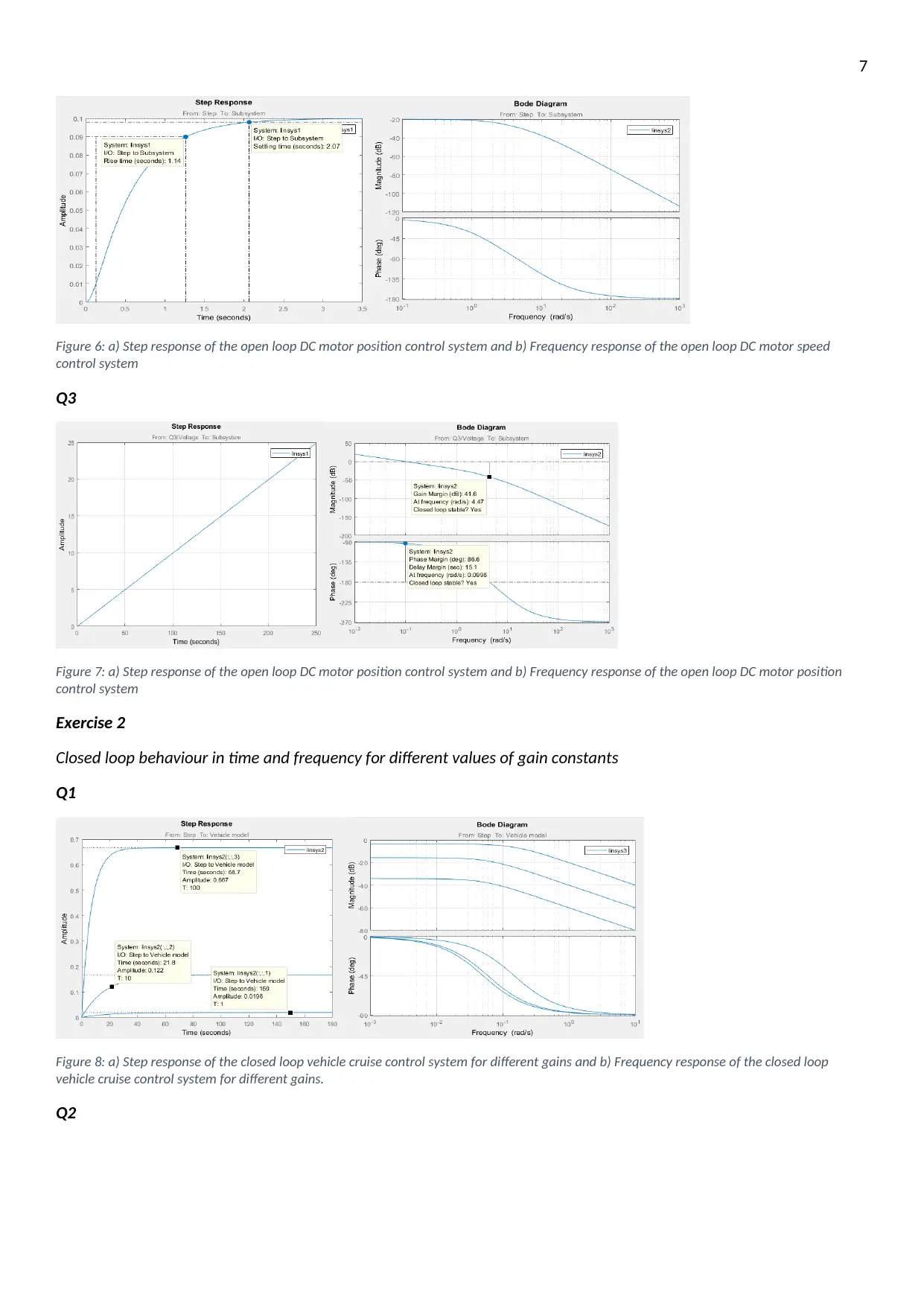
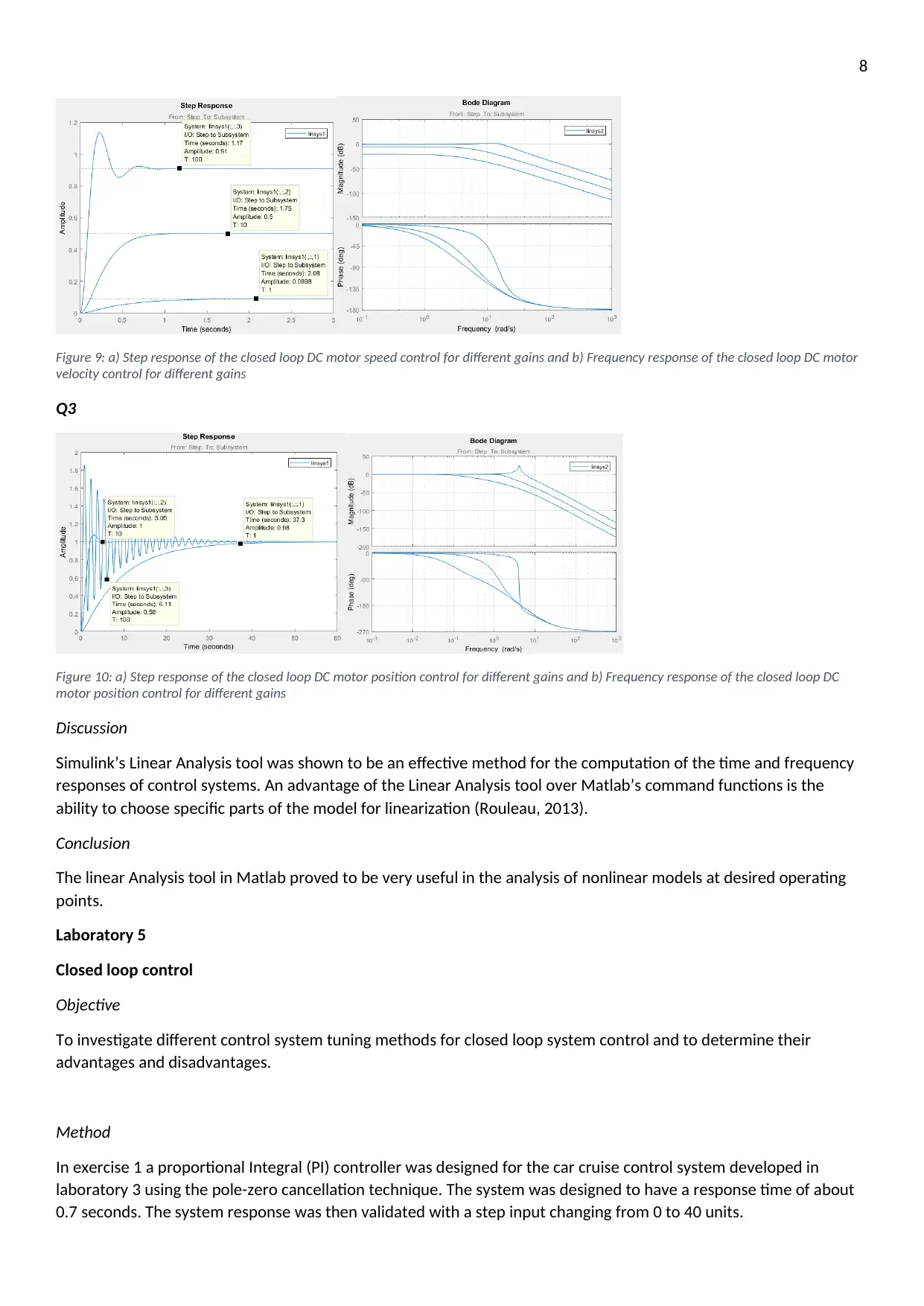
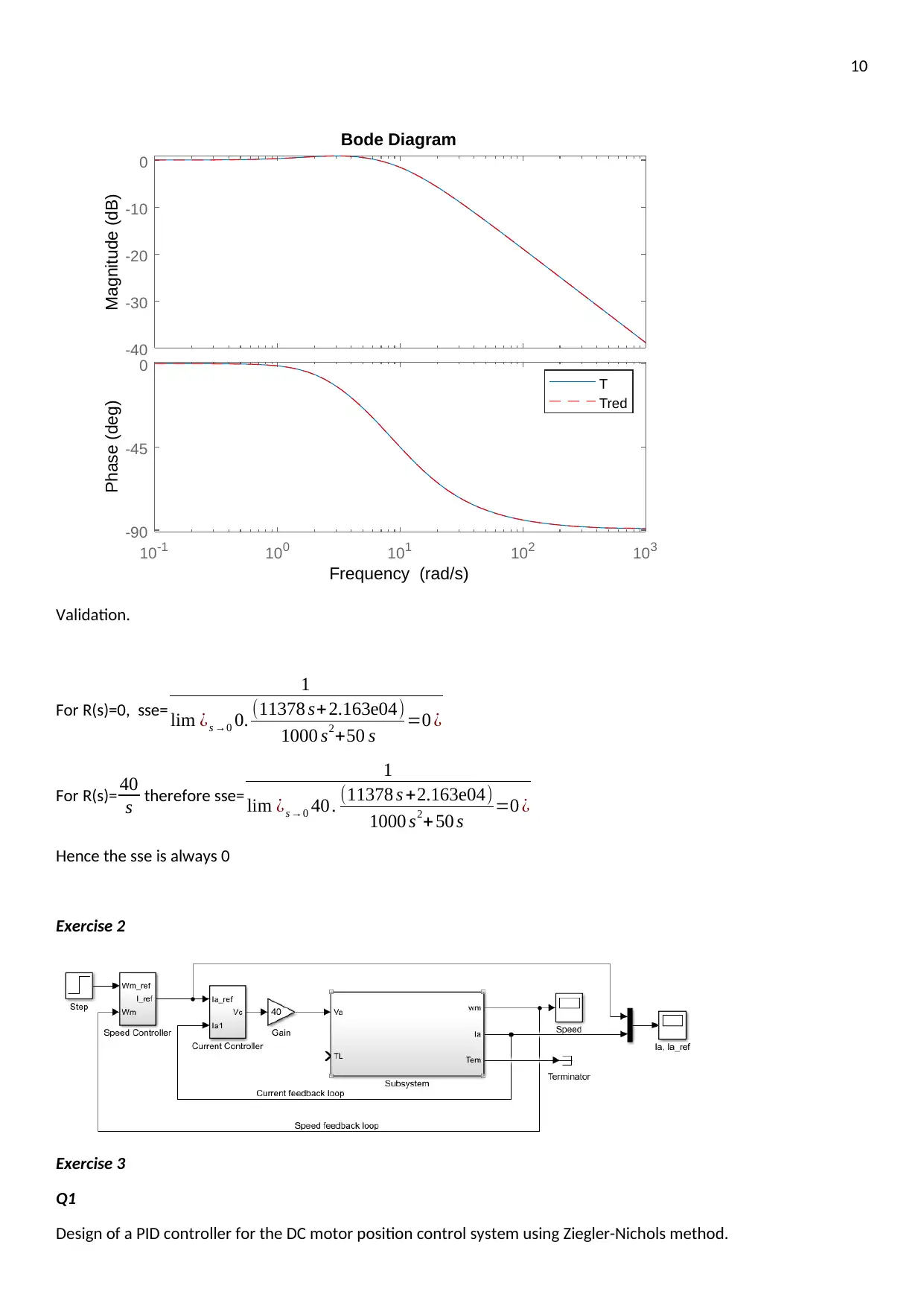
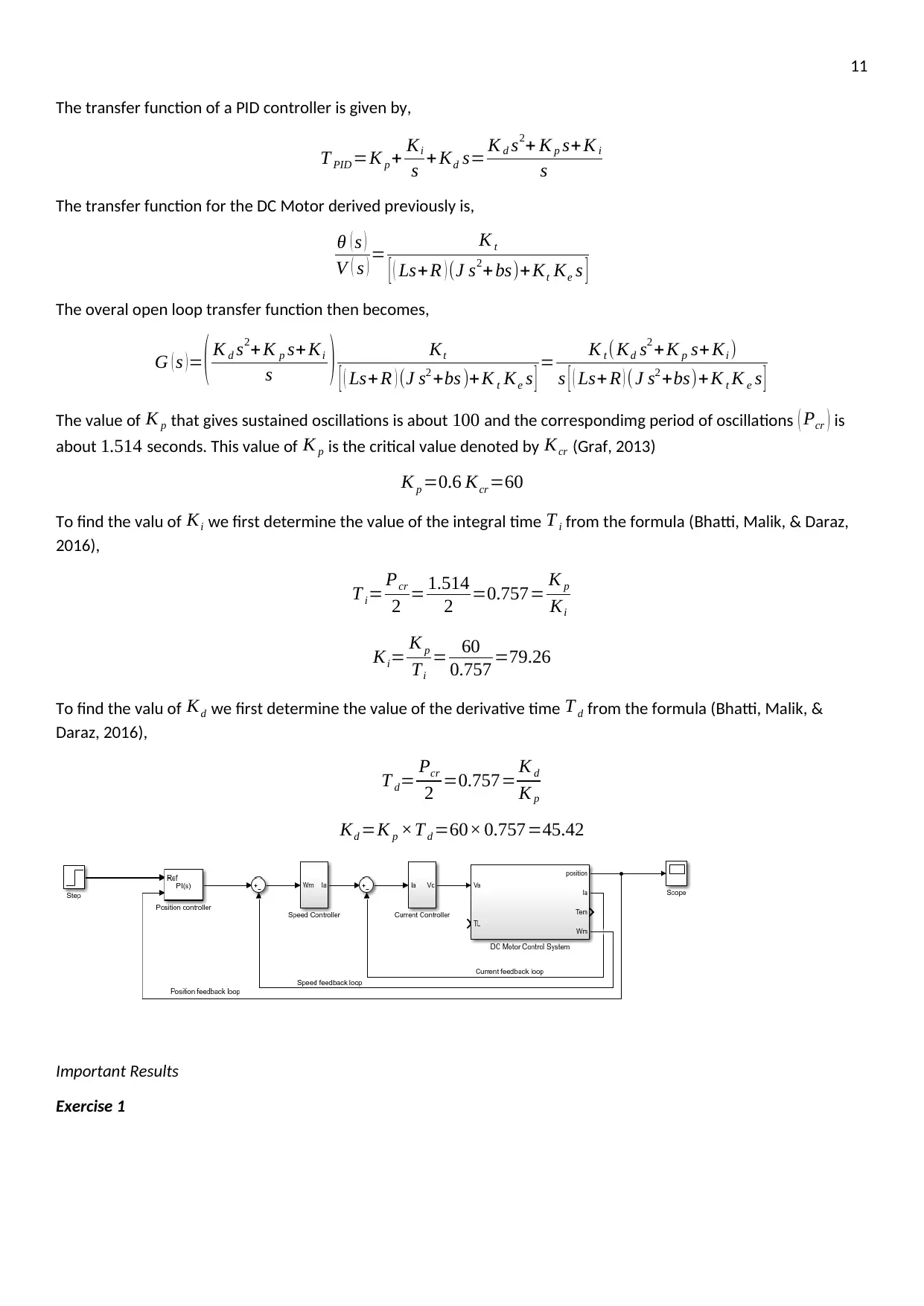
This report details the modeling and analysis of dynamic control systems using Matlab and Simulink. The report covers three laboratory sessions, each focusing on different aspects of control system design and analysis. Laboratory 3 focuses on modeling dynamic systems, including vehicle cruise control and DC motor velocity and position control, deriving transfer functions, and investigating time and frequency responses. Laboratory 4 delves into frequency response analysis of linear time-invariant (LTI) systems using Simulink's Linear Analysis tool. Finally, Laboratory 5 investigates closed-loop control, exploring different control system tuning methods, including PI and PID controllers, and their advantages and disadvantages, using techniques such as pole-zero cancellation and Ziegler-Nichols methods. The report includes derivations, simulations, results, discussions, and conclusions for each lab, providing a comprehensive overview of control system design and analysis techniques.



1 out of 14
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.