Mechanical Principles Report: Analysis of BMW Mechanical Systems
VerifiedAdded on 2023/06/10
|19
|2086
|413
Report
AI Summary
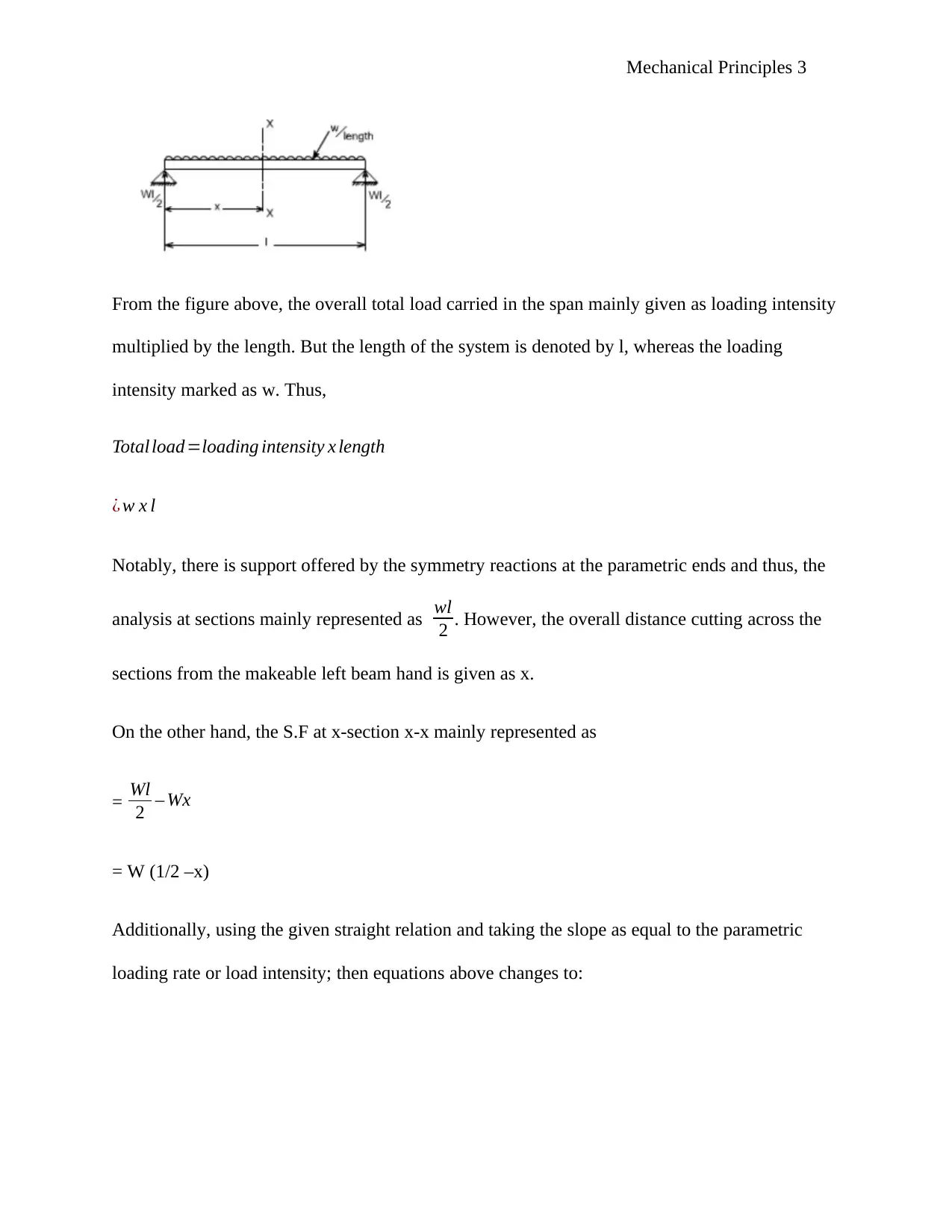
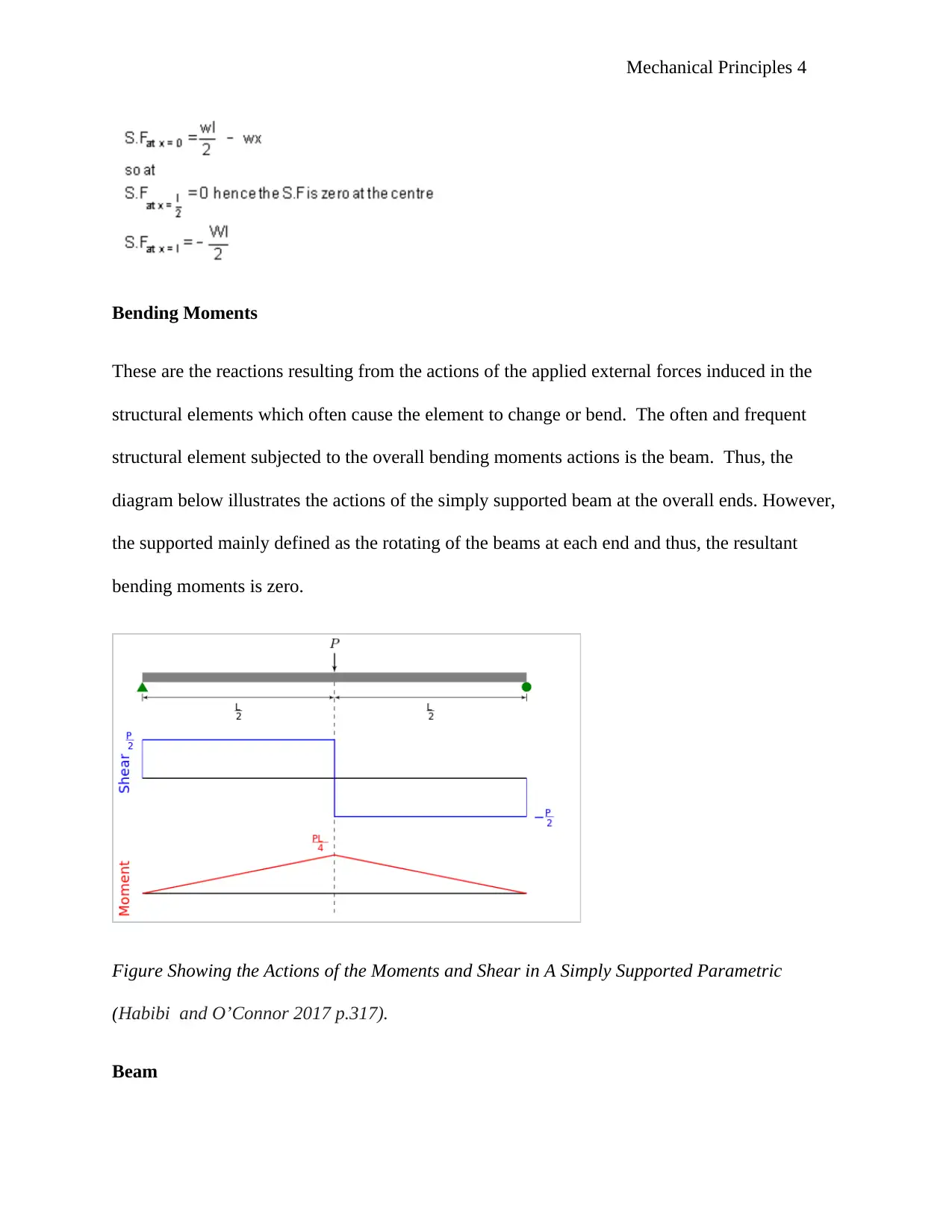
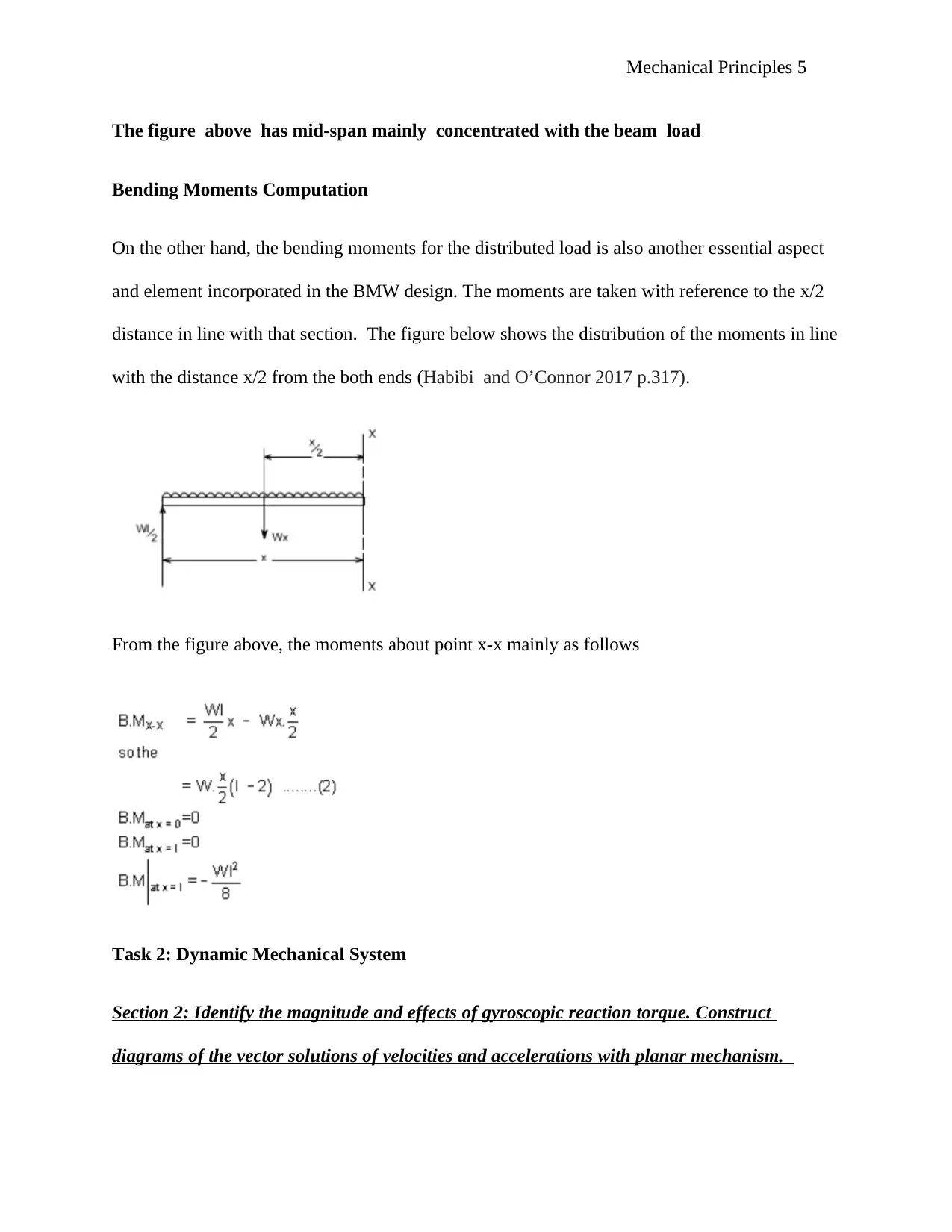
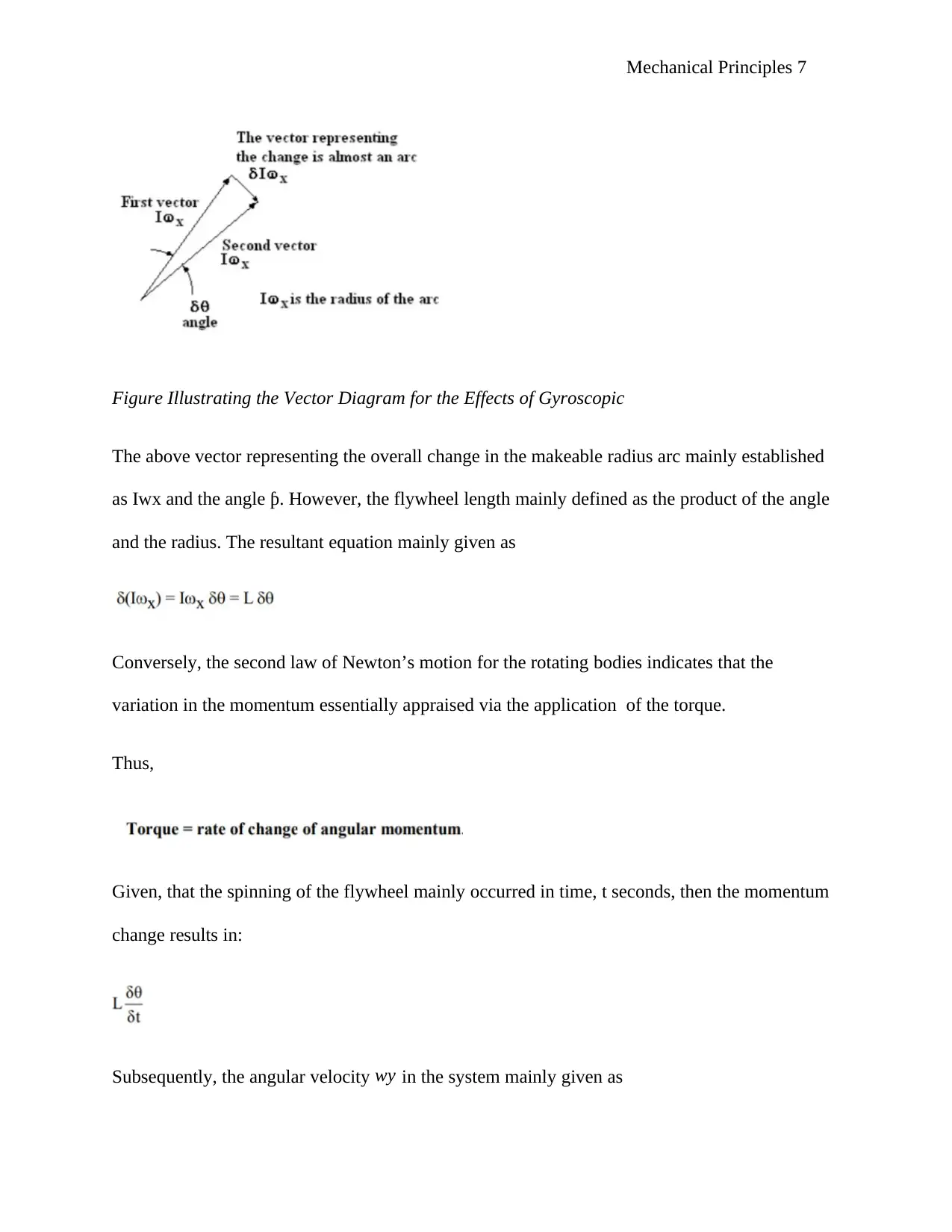
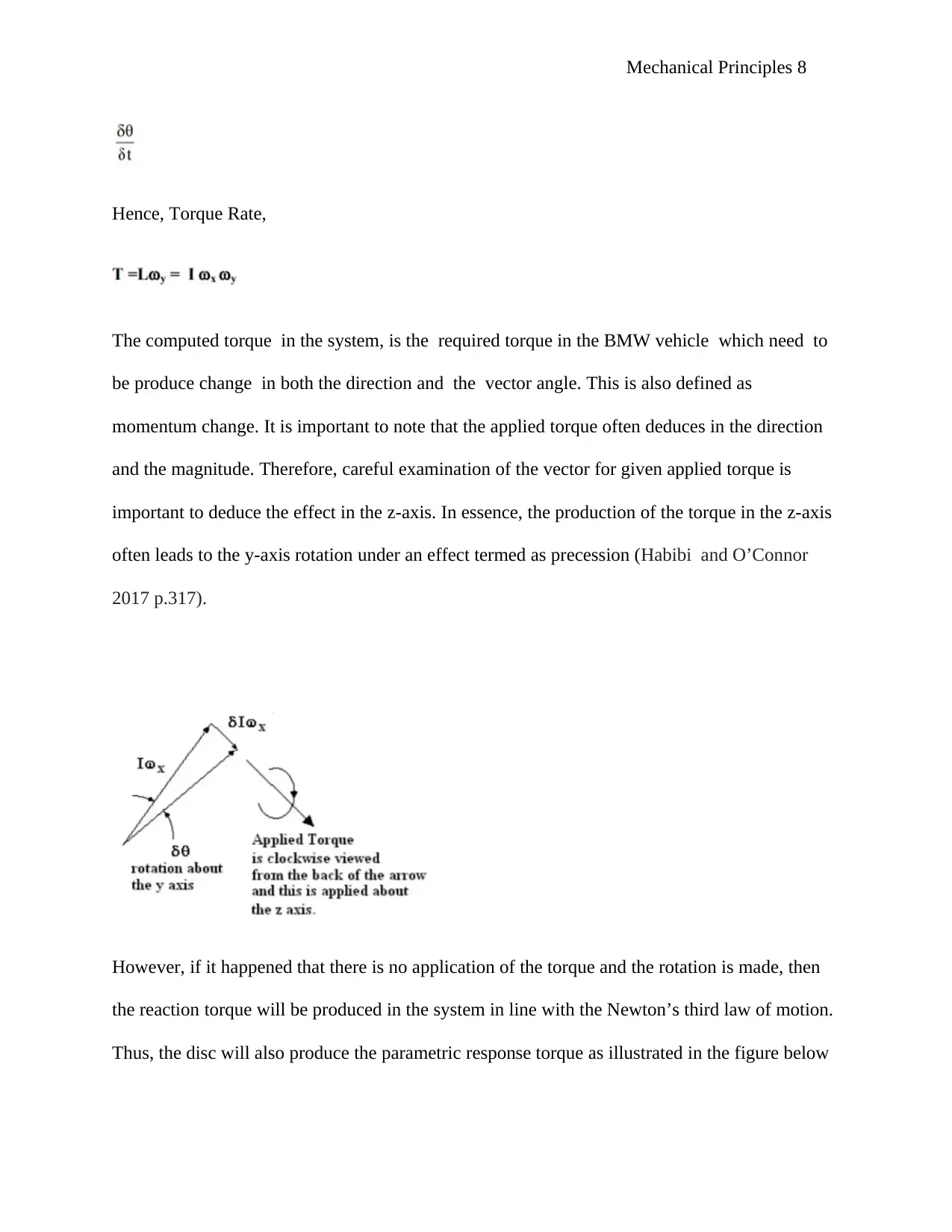
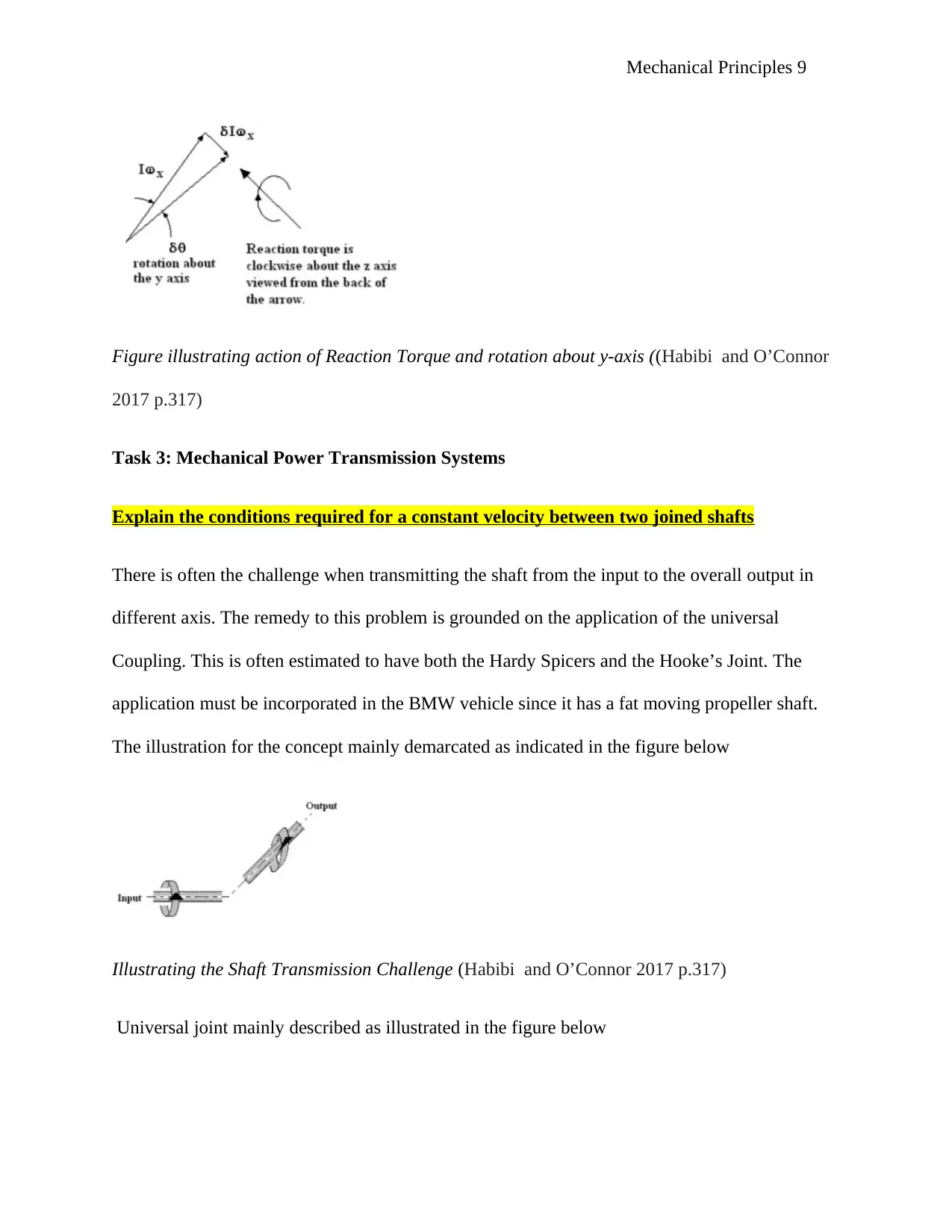
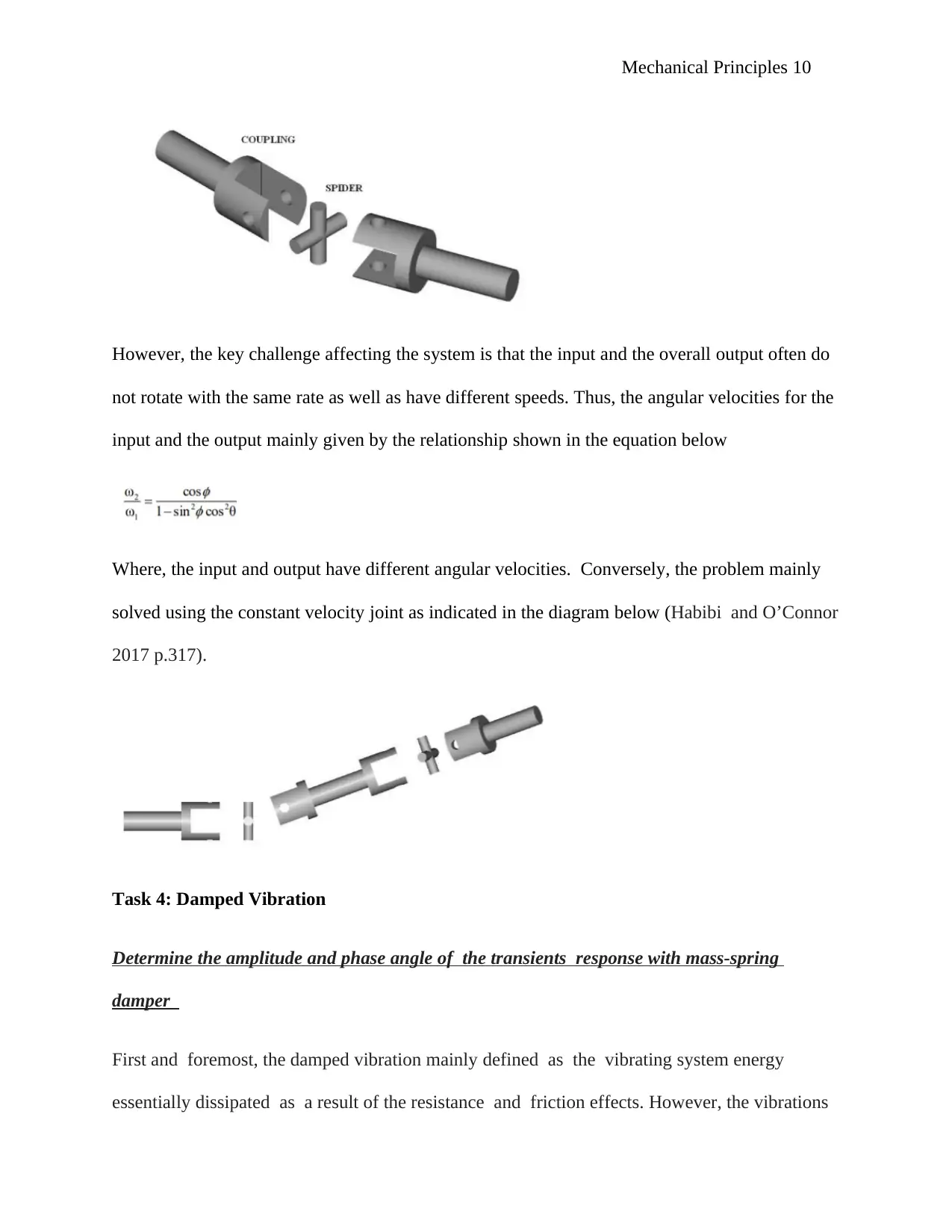
This report delves into the mechanical principles underpinning BMW vehicles, encompassing static and dynamic mechanical systems. It examines shear forces, bending moments in simply supported beams, and the effects of gyroscopic reaction torque. The report also explores mechanical power transmission systems, focusing on constant velocity joints and damped vibrations, including amplitude and phase angle analysis. Additionally, it addresses energy transfer in mechanical systems with uniform accelerations and calculates the operating efficiency of lead screws and screw jacks. Furthermore, the report investigates material determination from torsion tests and analyzes a case of mechanical power transmission failure, outlining corrective measures. The content provides a comprehensive overview of mechanical engineering concepts relevant to automotive design and analysis.


1 out of 19
Related Documents


Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.