ER4706: Applied Instrumentation Report on Crane System Design
VerifiedAdded on 2022/09/01
|6
|1467
|30
Report
AI Summary
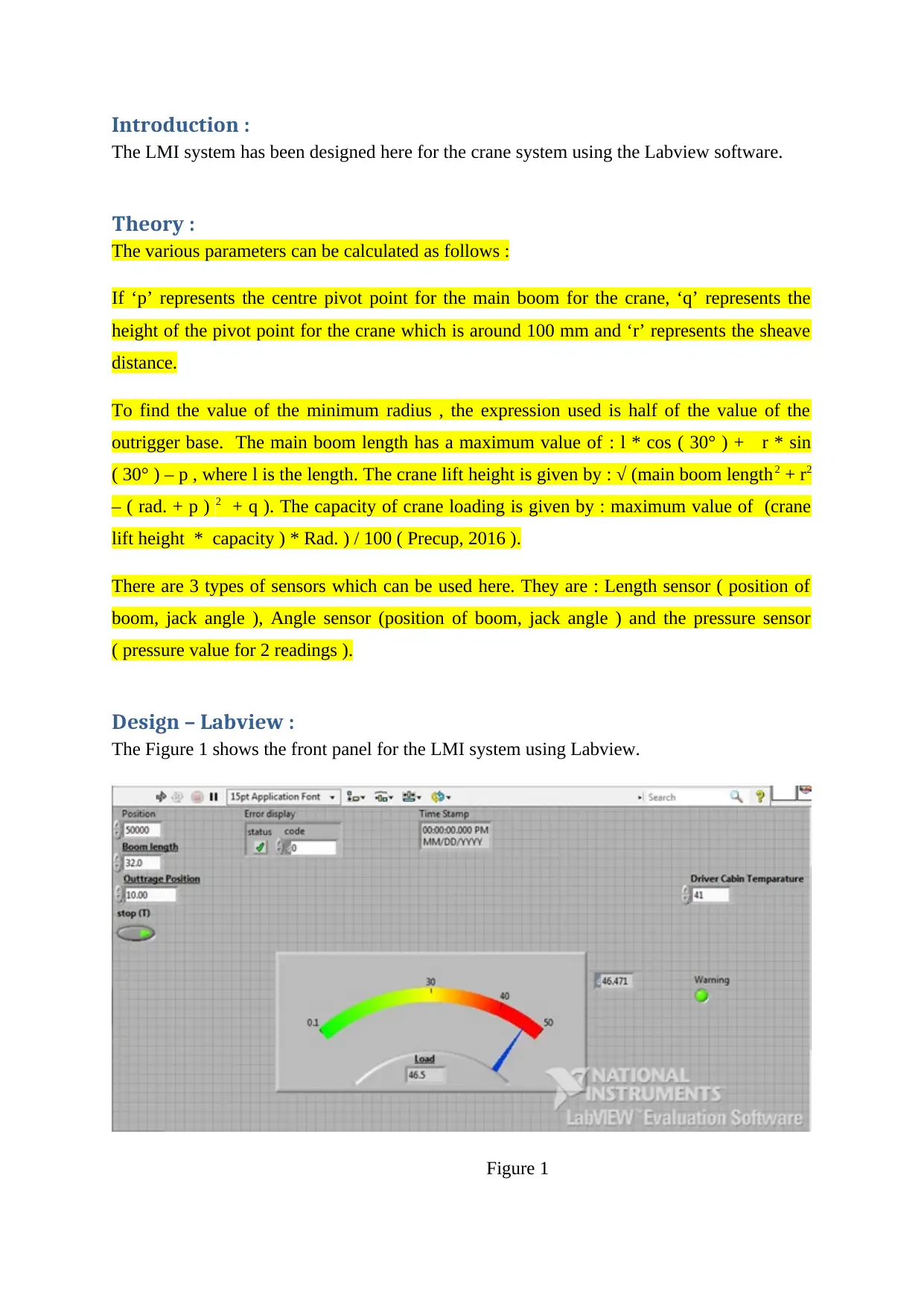
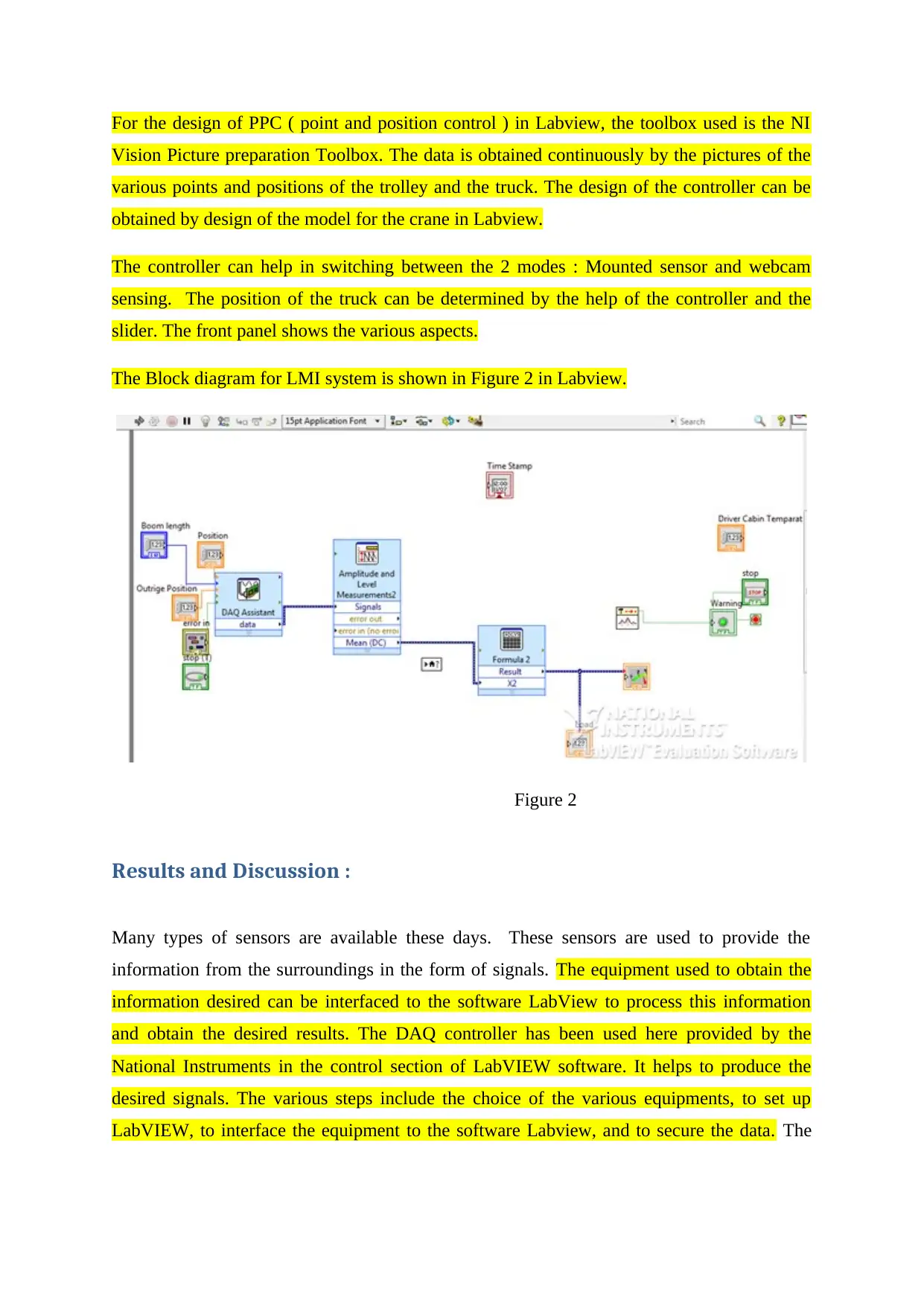
This report details the design and implementation of a Load Moment Indicator (LMI) system for a crane, utilizing Labview software. The introduction provides context, followed by a theoretical overview of relevant parameters, including the calculation of minimum radius, crane lift height, and load capacity. The design section showcases the Labview front panel and block diagram, emphasizing the use of the NI Vision Picture preparation Toolbox for Point and Position Control (PPC). The results and discussion section highlights the application of various sensors and data acquisition (DAQ) controllers, specifically from National Instruments, and the process of interfacing equipment with Labview. The evaluation segment discusses the significance of sensors like strain gauges and load cells in measuring strain and load, with examples such as clamp sensors and shackle load cells. Finally, the proposal suggests cost-effective improvements, including the incorporation of low-cost controllers and advancements through wireless media and IoT (Internet of Things) for enhanced data transmission and system connectivity. The report references several publications related to fuzzy modeling, control design, and sensor technology.
1 out of 6
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.