University Project: Design and Development of a Pipe Inspection Robot
VerifiedAdded on 2020/02/19
|10
|1543
|41
Project
AI Summary
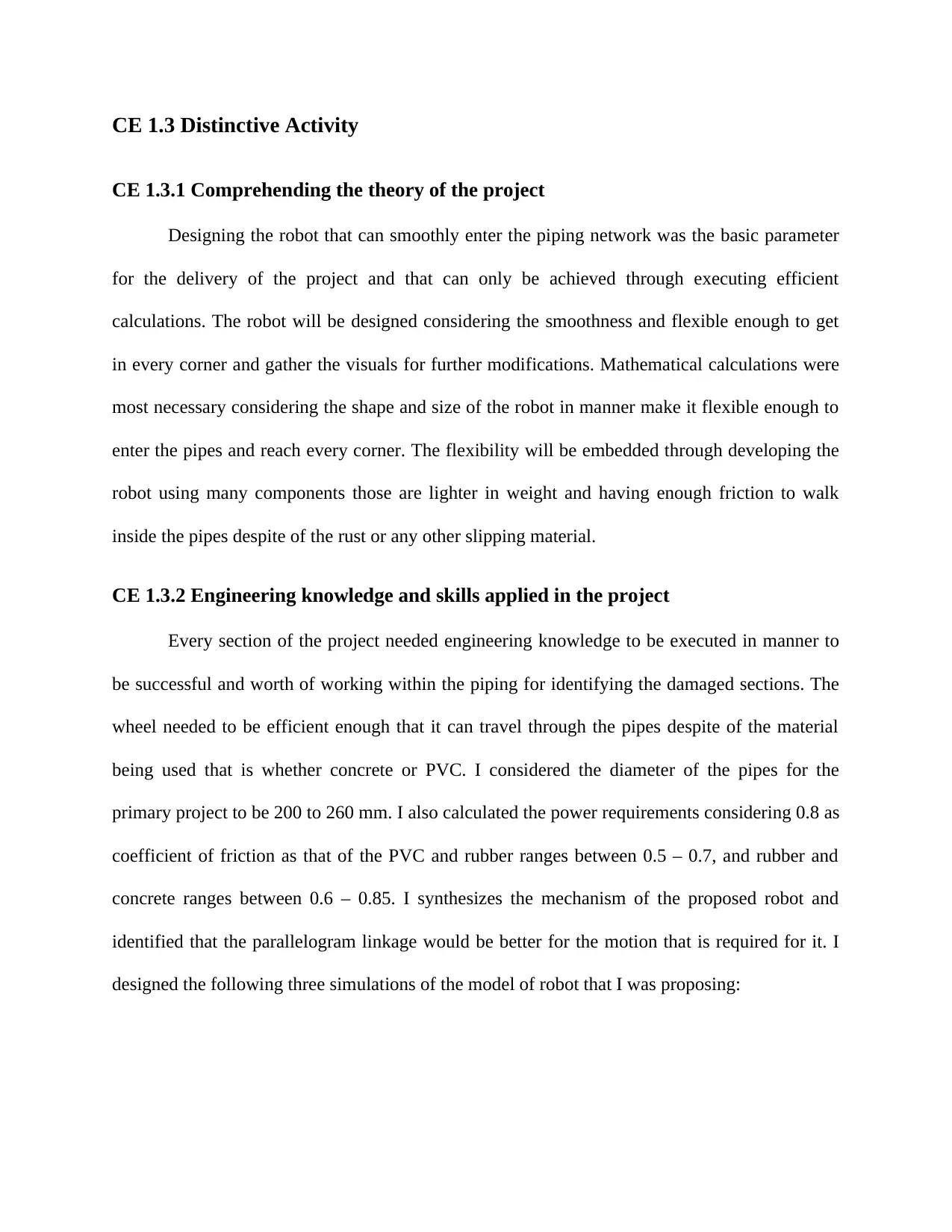
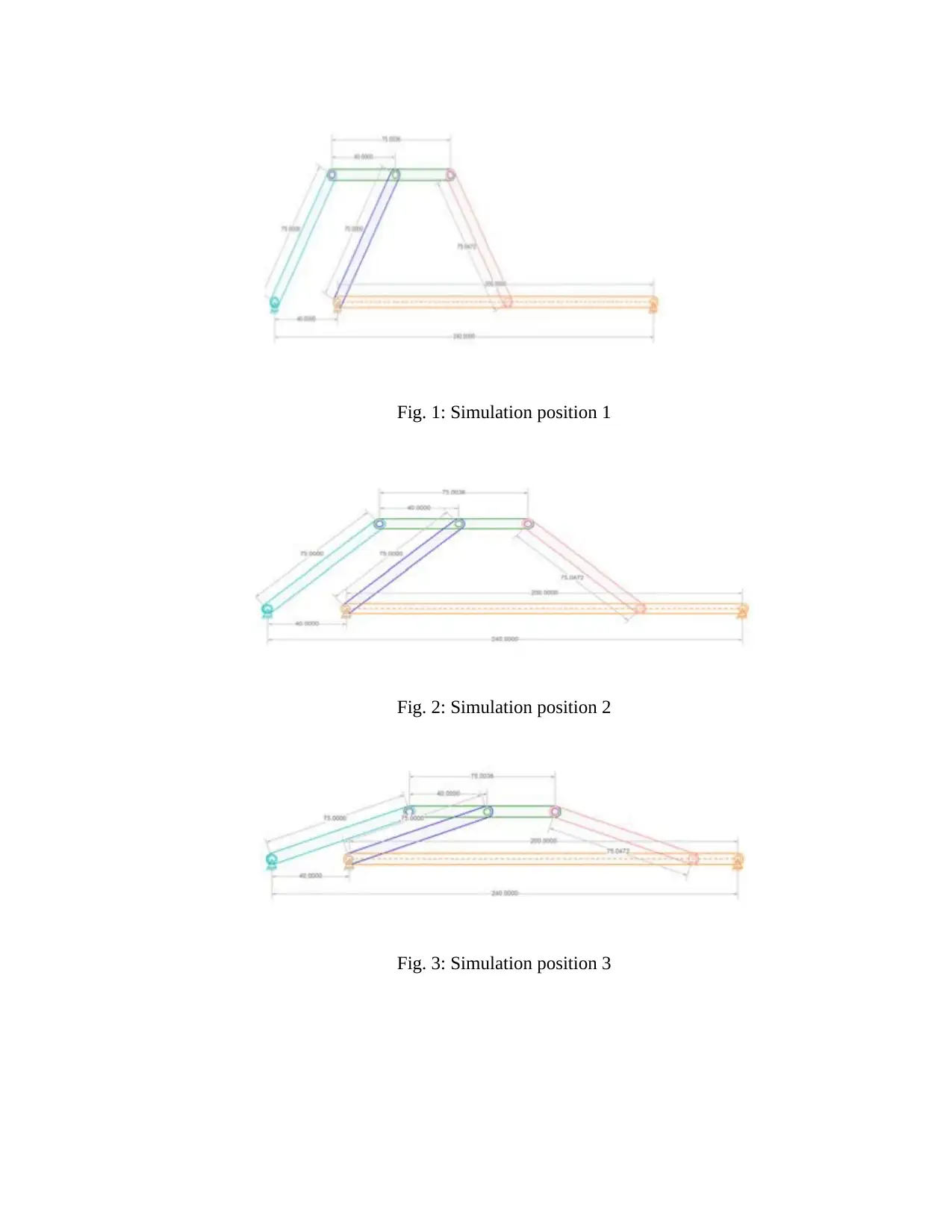
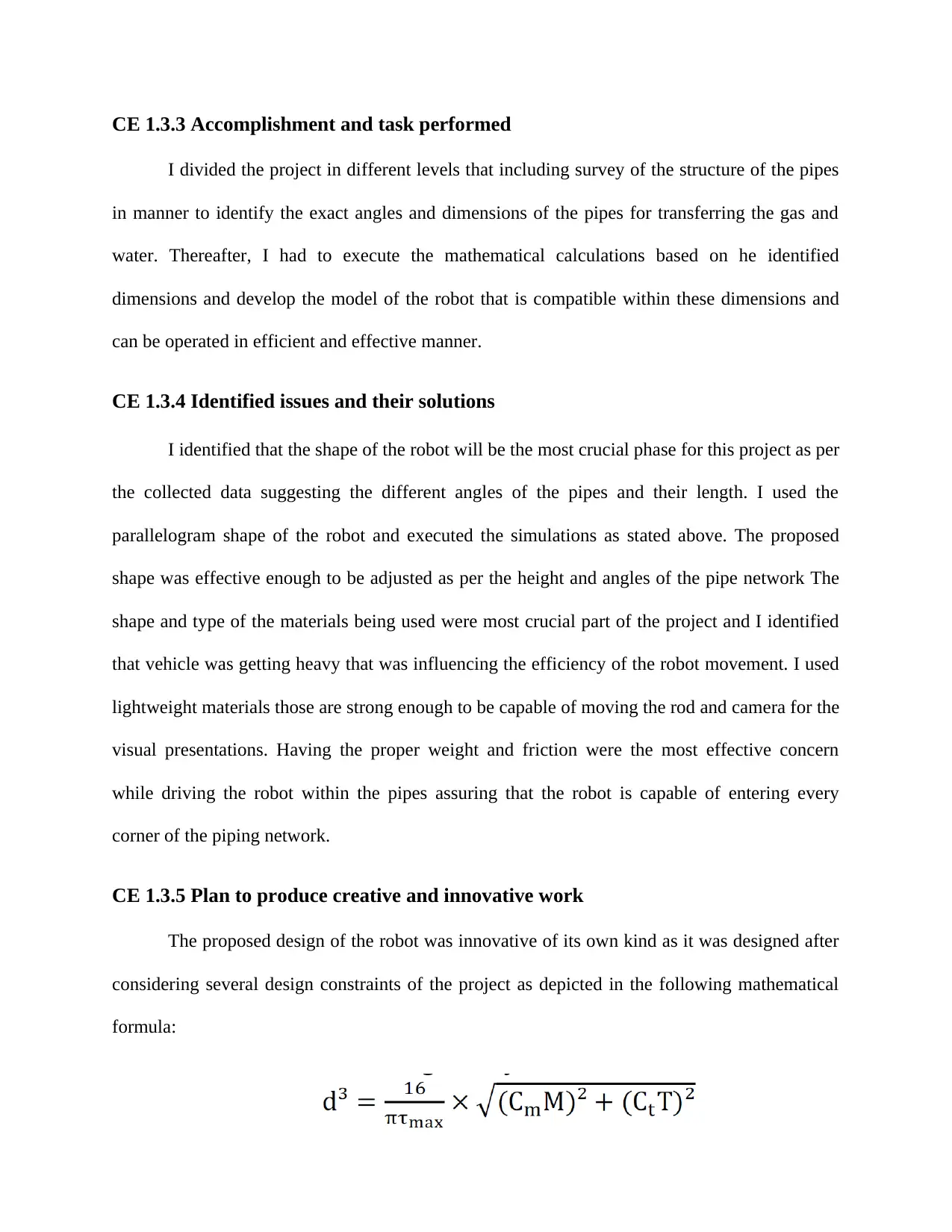
This document is a Competency Demonstration Report (Career Episode 1) detailing the design and development of a pipe inspection robot. The project aimed to create a robot capable of entering pipelines to identify issues such as corrosion, leakage, and structural damage. The report covers the project background, objectives, the author's role as team leader, responsibilities, and distinctive activities including mathematical calculations for wheel selection and mechanism synthesis. The report also discusses the engineering knowledge applied, challenges faced, innovative solutions, and collaborative aspects of the project. Simulations of the robot's design are presented. The project's success is evaluated based on the robot's ability to navigate pipes and provide visual inspection, demonstrating the author's contributions to design, calculations, and overall project management. The report emphasizes the innovative design constraints, the collaborative effort of the team, and the successful outcome of the project in terms of its ability to perform pipe inspections.

1 out of 10
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.