Mechanical Engineering Assignment: Statics, Vectors and Force Analysis
VerifiedAdded on 2022/08/12
|14
|1432
|35
Homework Assignment
AI Summary
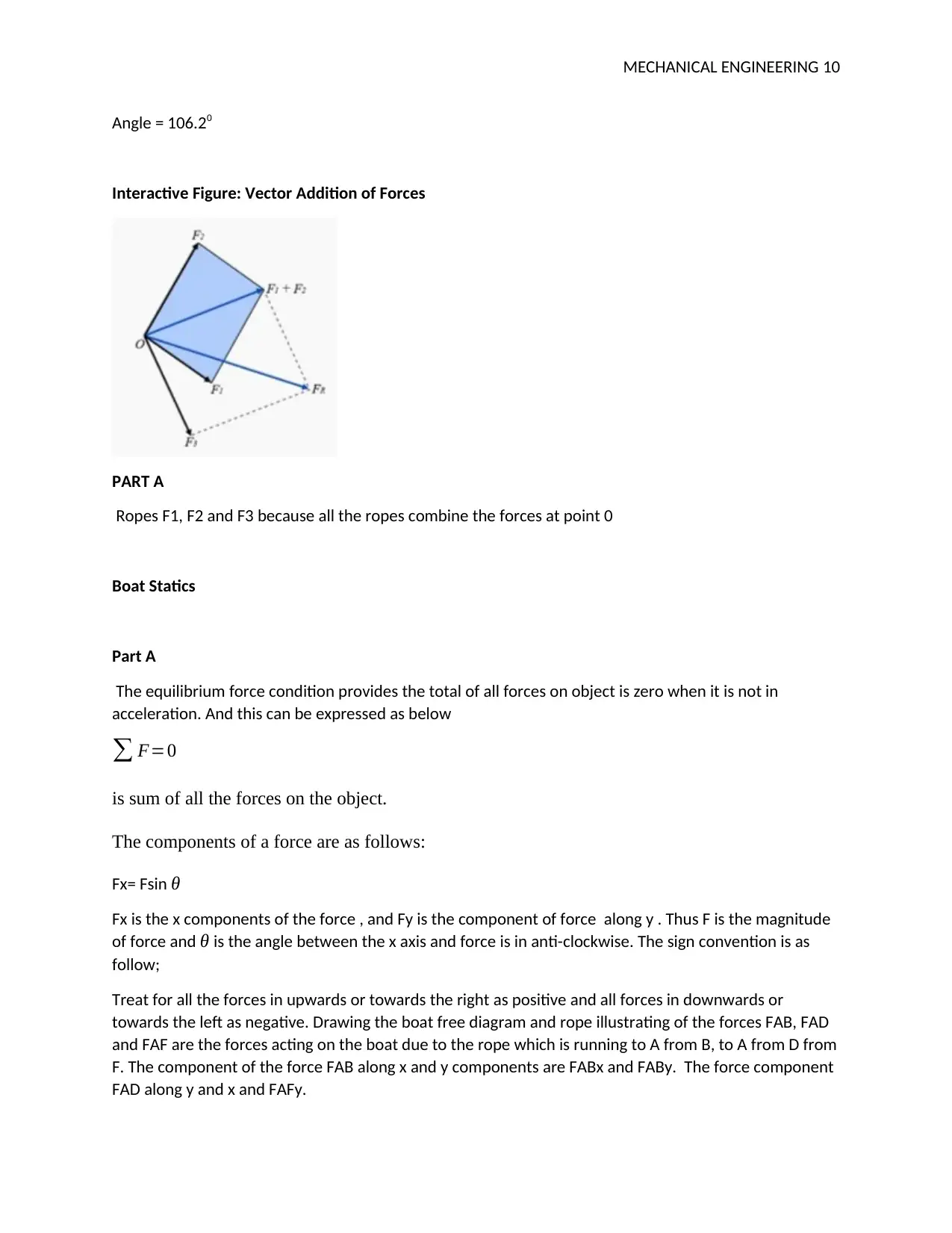
This Mechanical Engineering assignment solution covers a range of topics within statics and vector analysis. It begins with Cartesian vectors, calculating components and resultants of forces in 2D and 3D, including finding angles and magnitudes. The solution then explores the addition of coplanar force systems, including the calculation of horizontal and vertical components, and the magnitude of resultant forces. Position vectors are analyzed, including determining the position of points and calculating vectors between points. The assignment also covers vector dot products and vector addition using geometric methods, including the law of cosines and sines. Furthermore, the solution presents a video solution to a coplanar force problem and discusses boat statics, including the equilibrium of forces and the calculation of forces in ropes. Finally, the solution includes a 3D force resultant problem and examples of Cartesian vectors, including the calculation of force components. References for the assignment are provided at the end.


1 out of 14


Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.