Mechanical Vibrations Assignment Solution, Semester 1, University Name
VerifiedAdded on 2022/08/12
|16
|381
|25
Homework Assignment
AI Summary
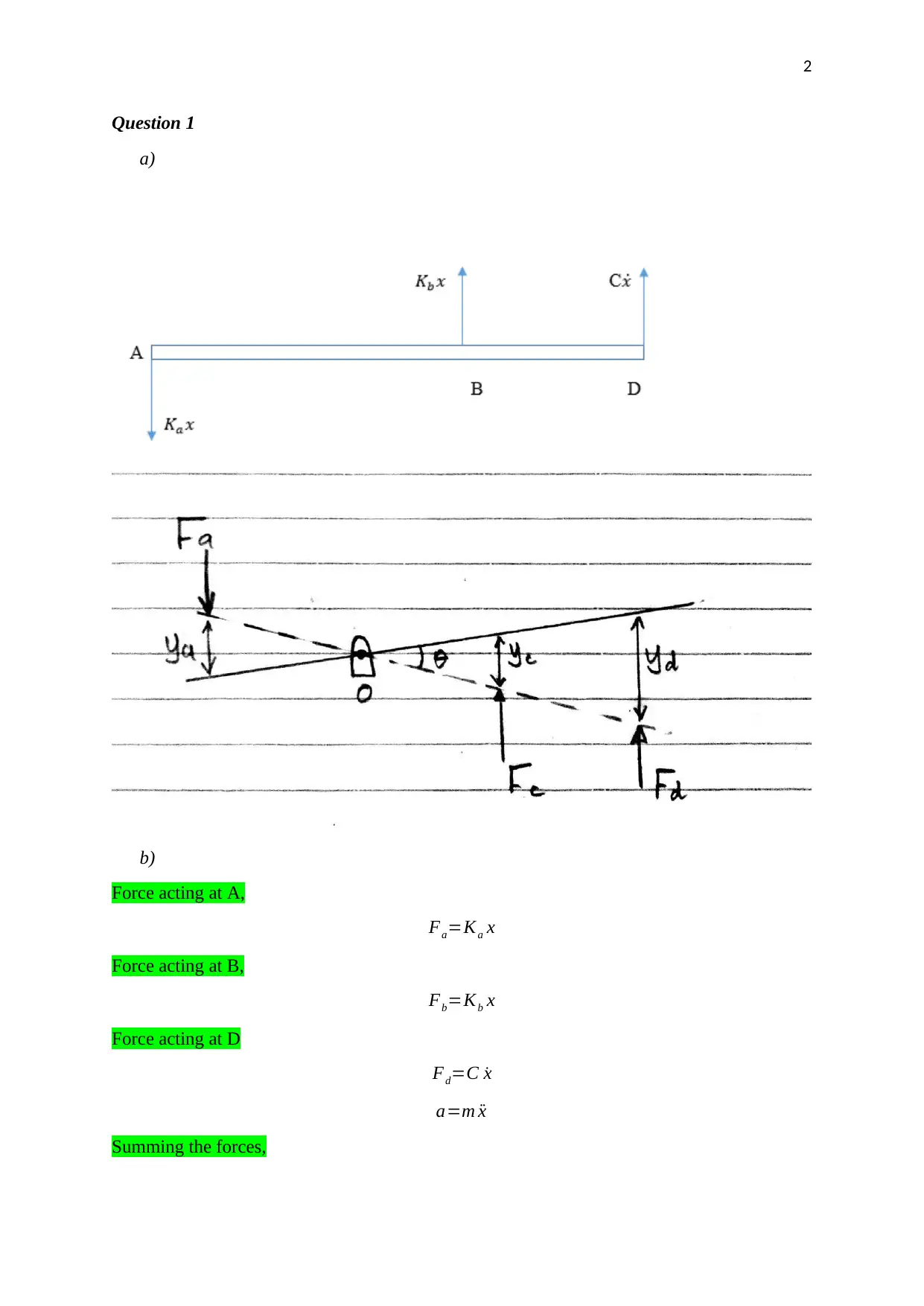
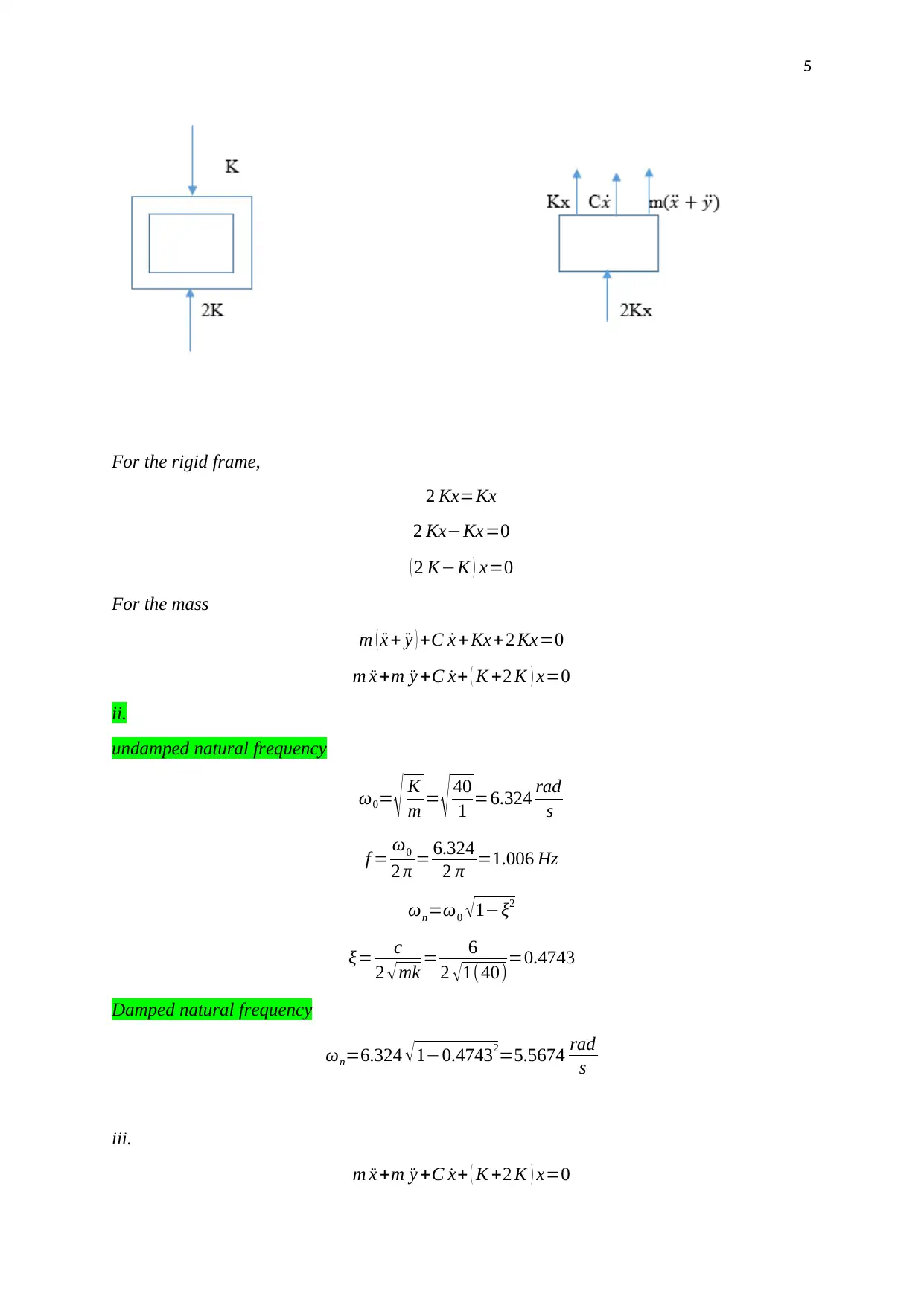
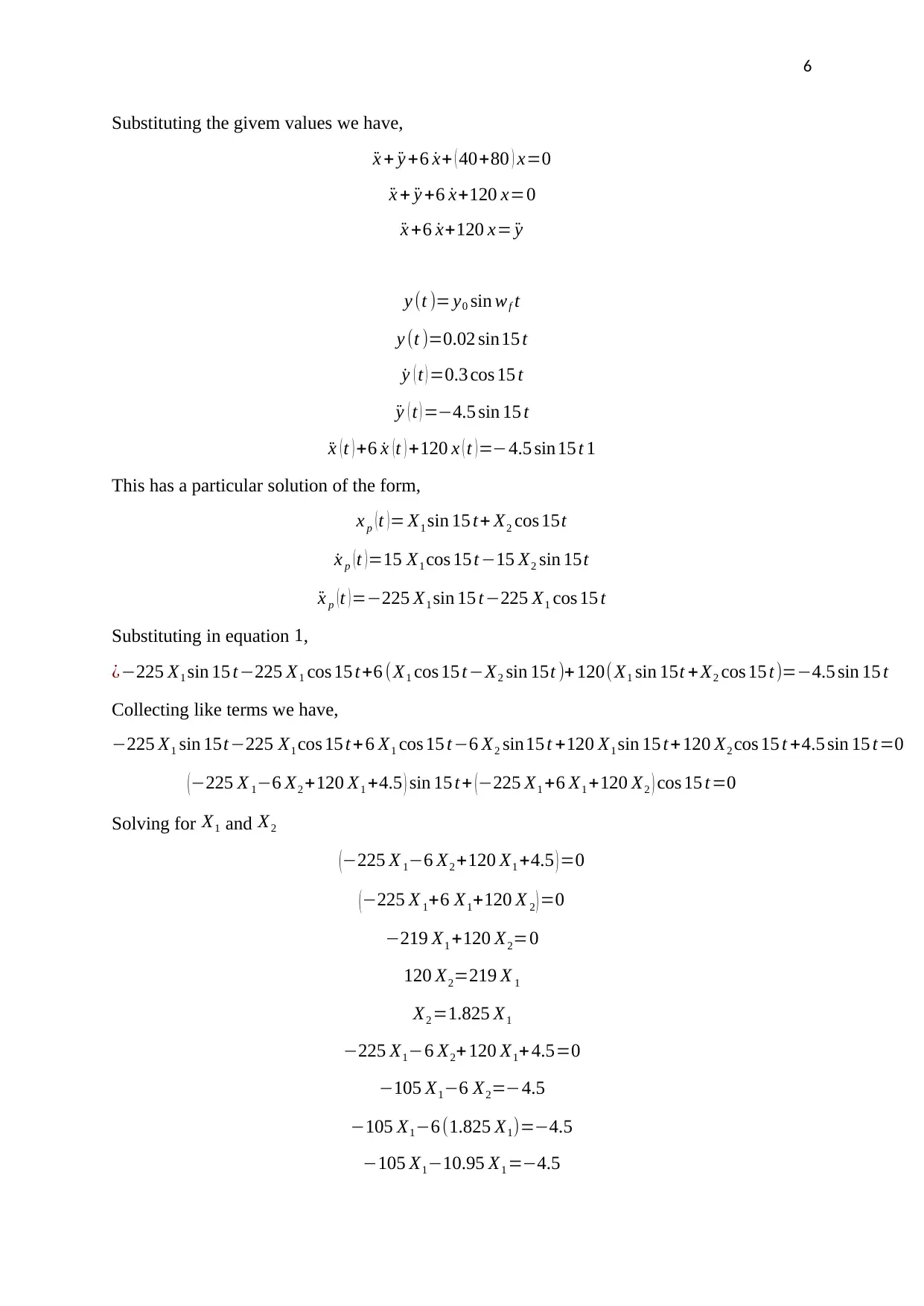
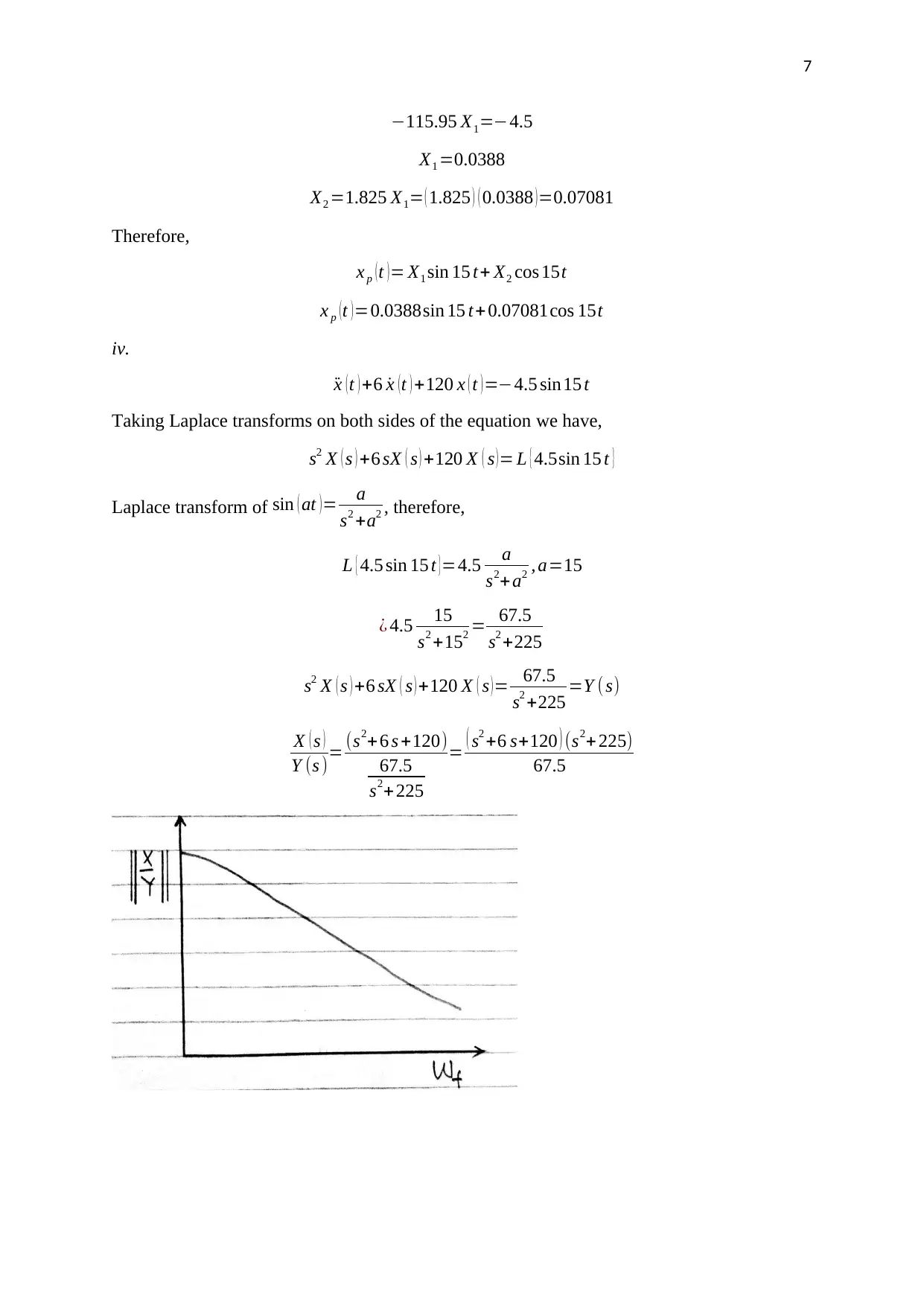
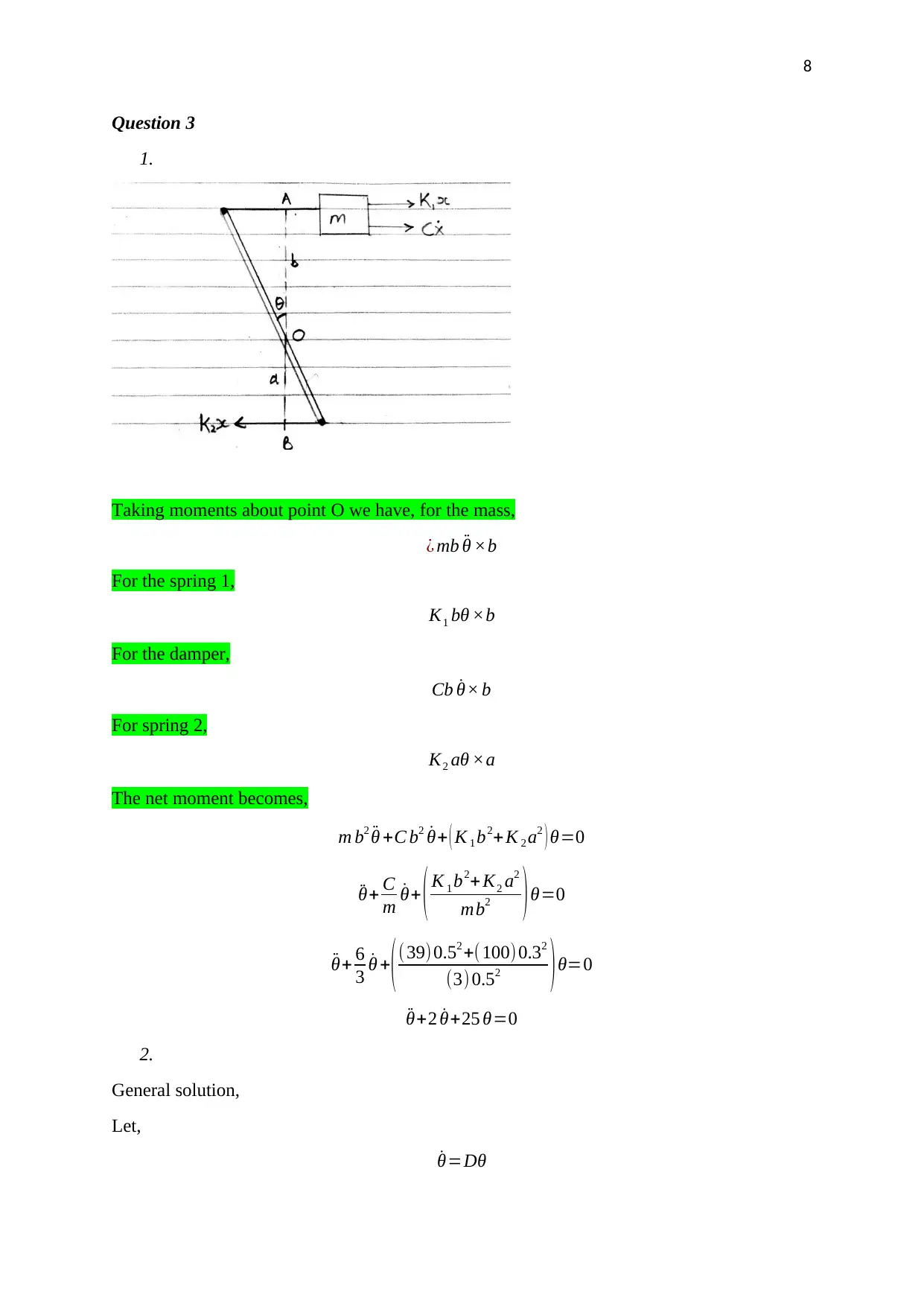
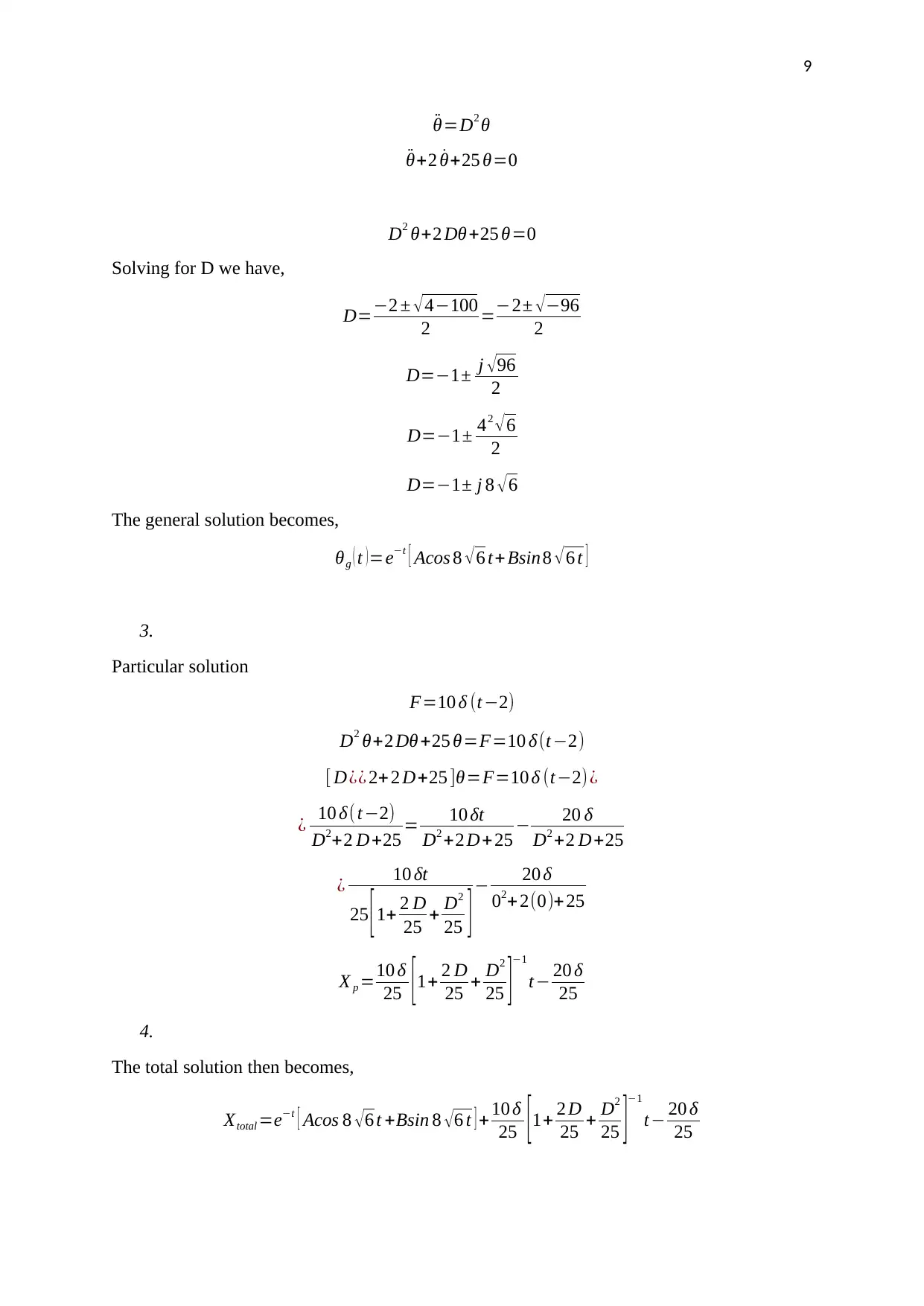
This assignment solution covers several key topics in mechanical vibrations. It begins by analyzing forces and solving equations of motion, then proceeds to calculate natural and damped frequencies for rigid frames. The solution further delves into the application of Laplace transforms and the derivation of particular solutions for specific forcing functions. It also examines the dynamics of a system with a spring, damper, and mass, providing a detailed breakdown of the forces involved and the resulting equations of motion. Finally, the assignment explores the behavior of a system involving a pendulum and a mass, deriving the natural frequencies and solving for constants within the system. The solution includes a bibliography citing relevant sources for further study.



1 out of 16
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.