MEEM 5715 Linear Systems Final Exam Solution: Base Excitation System
VerifiedAdded on 2022/01/04
|8
|665
|30
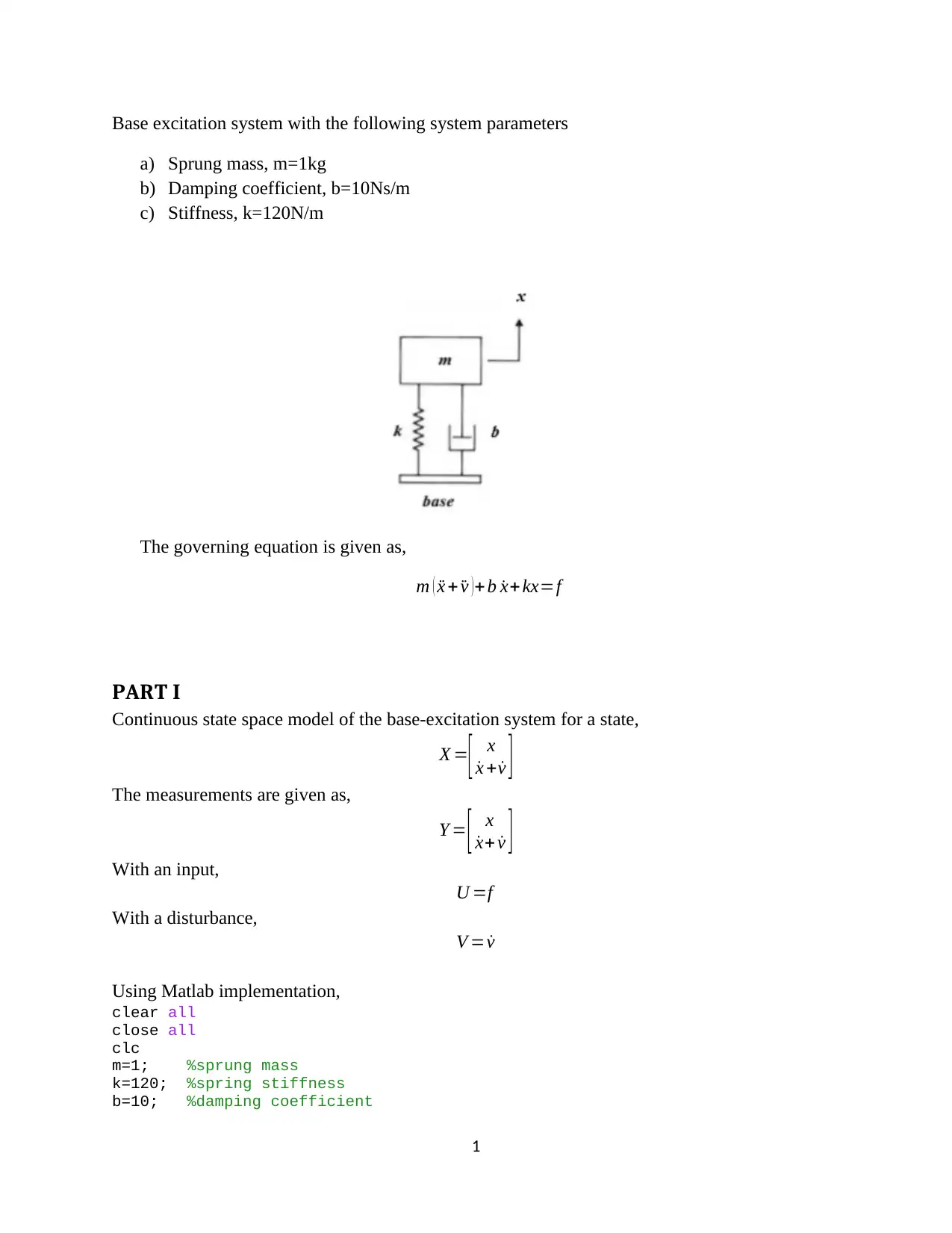
Homework Assignment
AI Summary
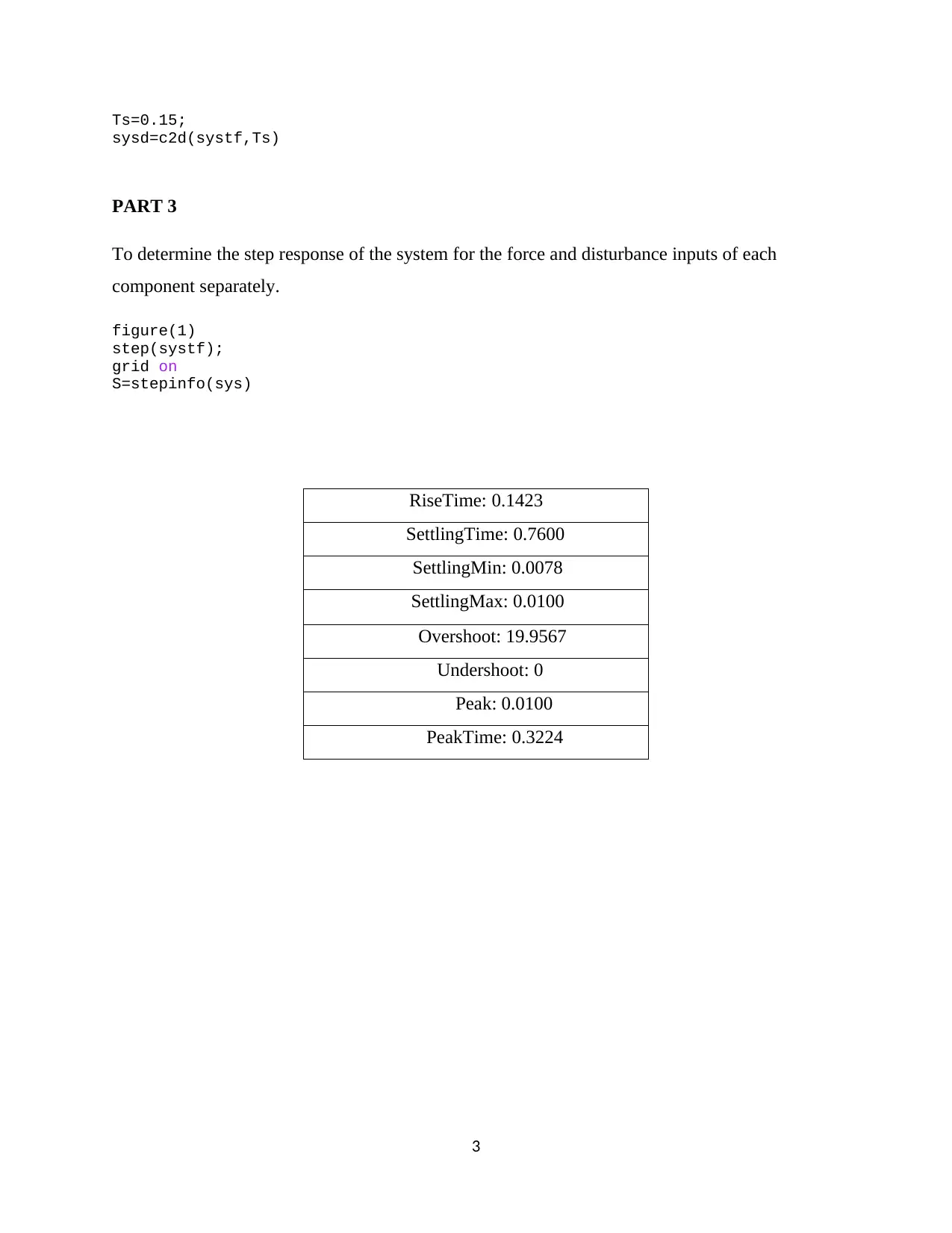
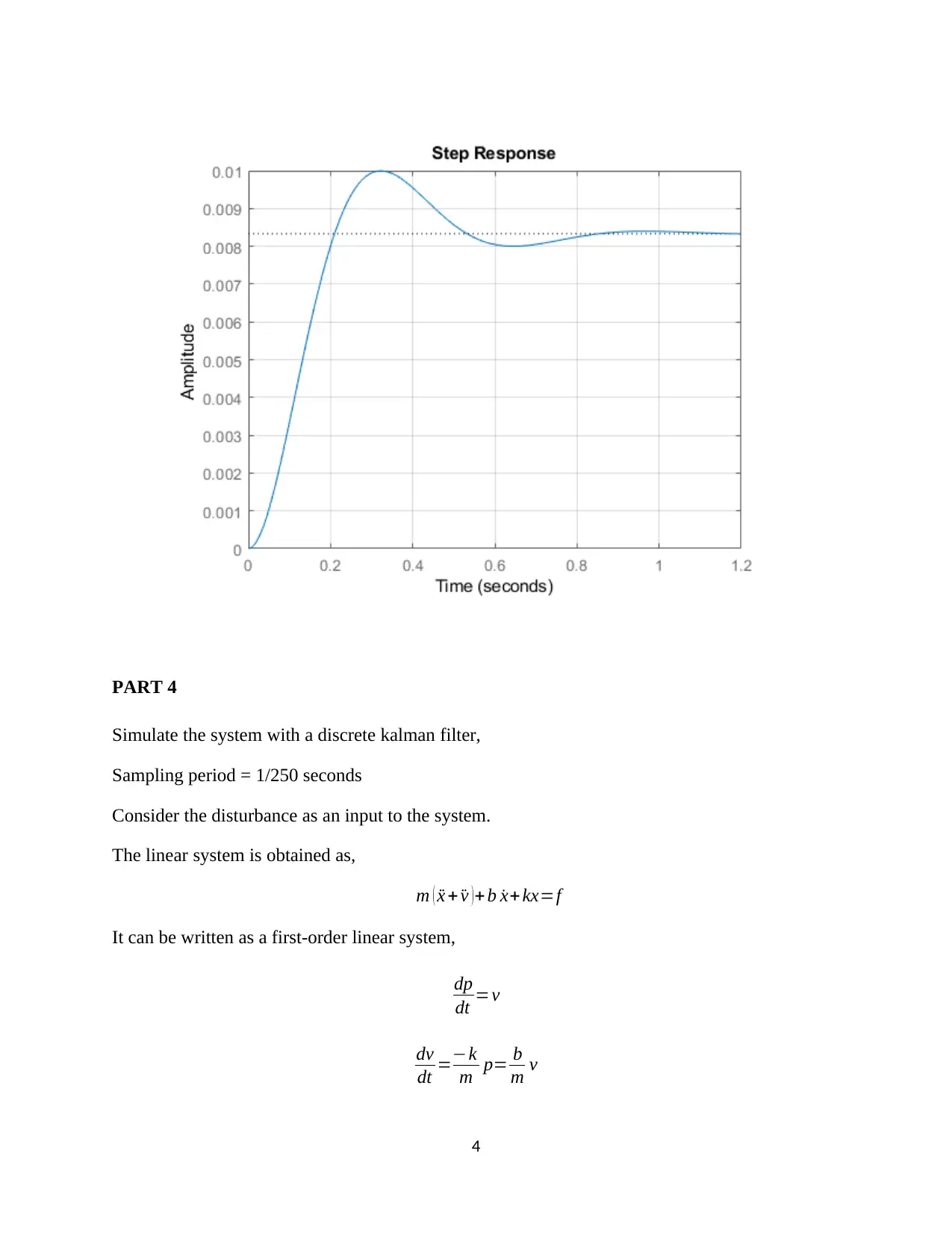
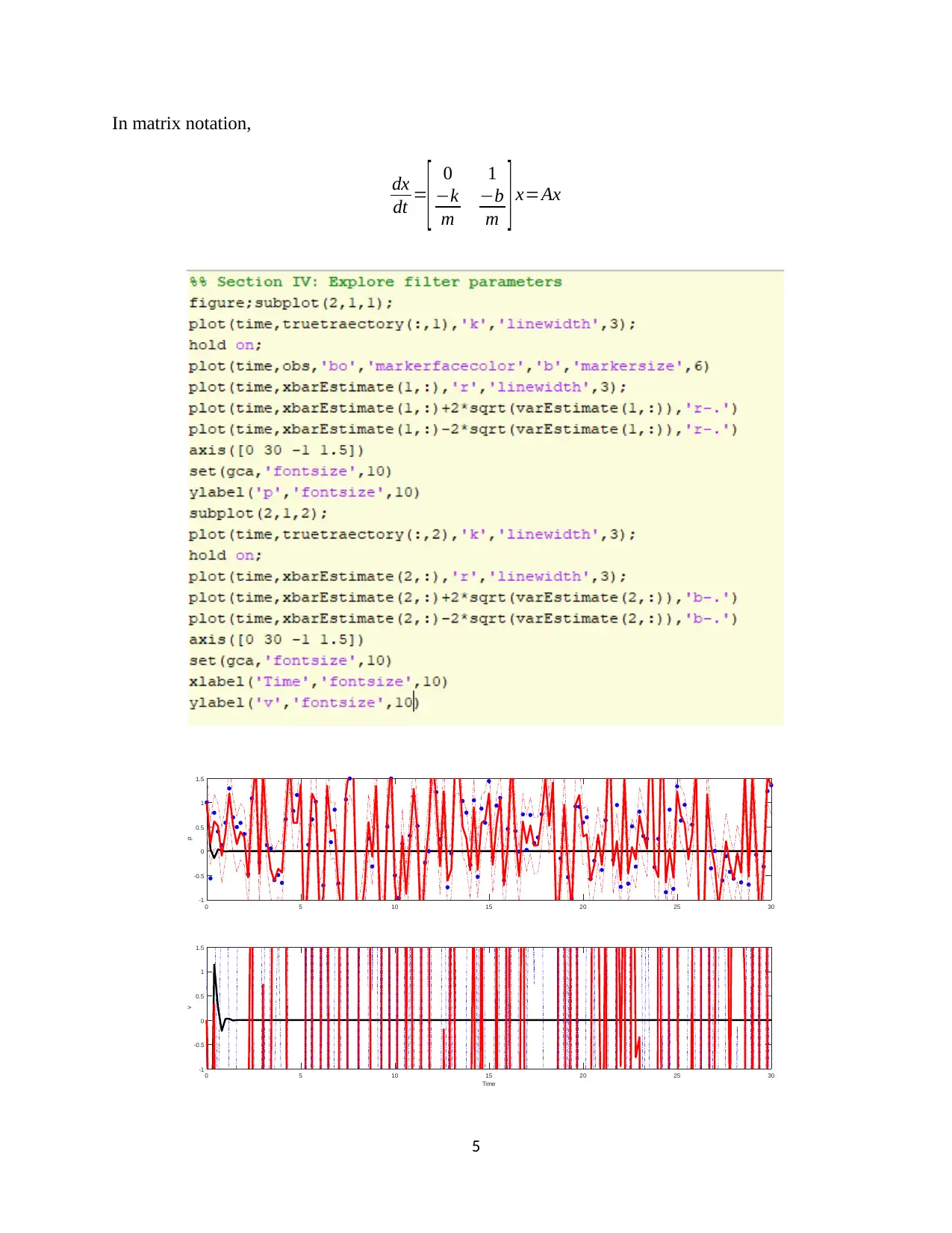
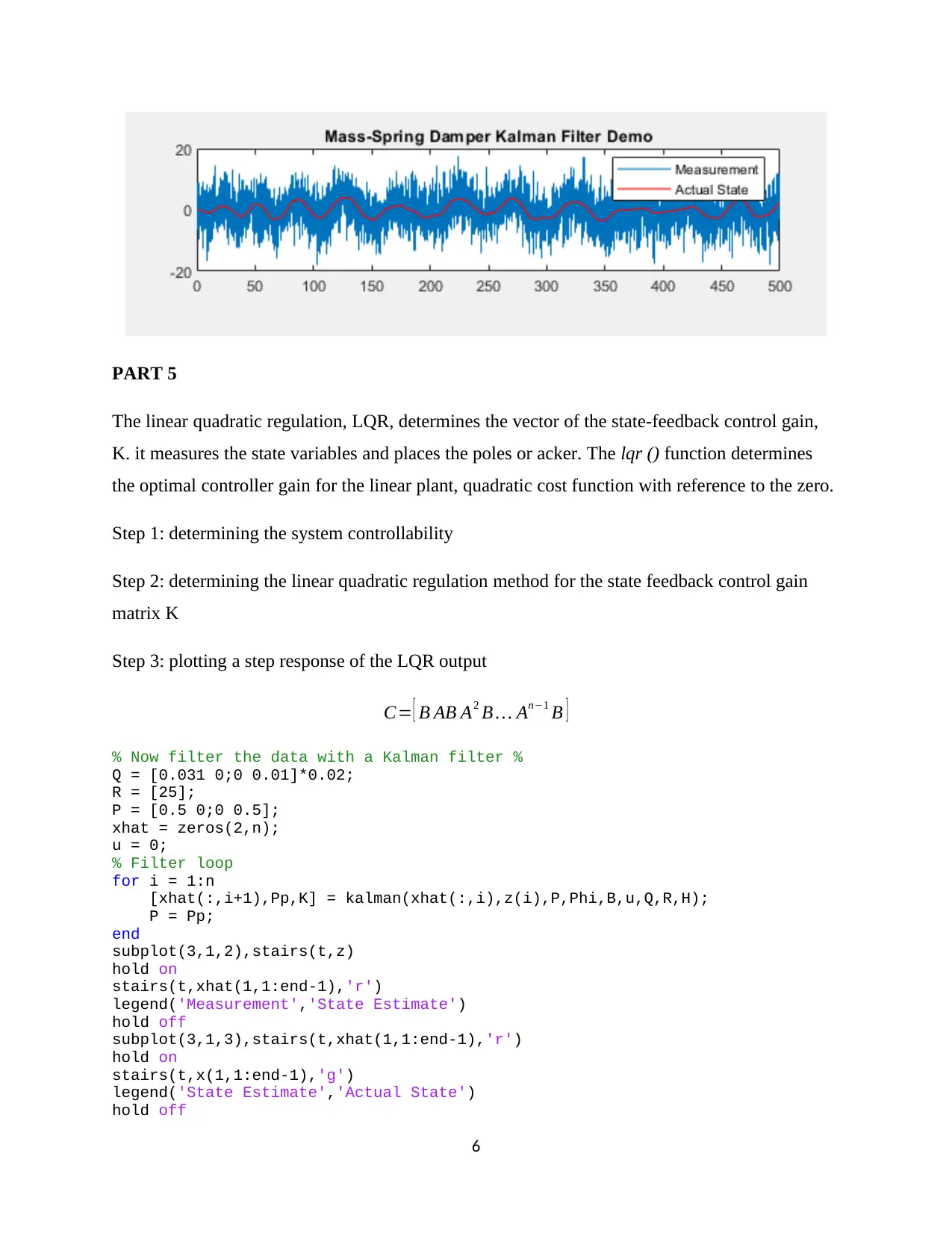
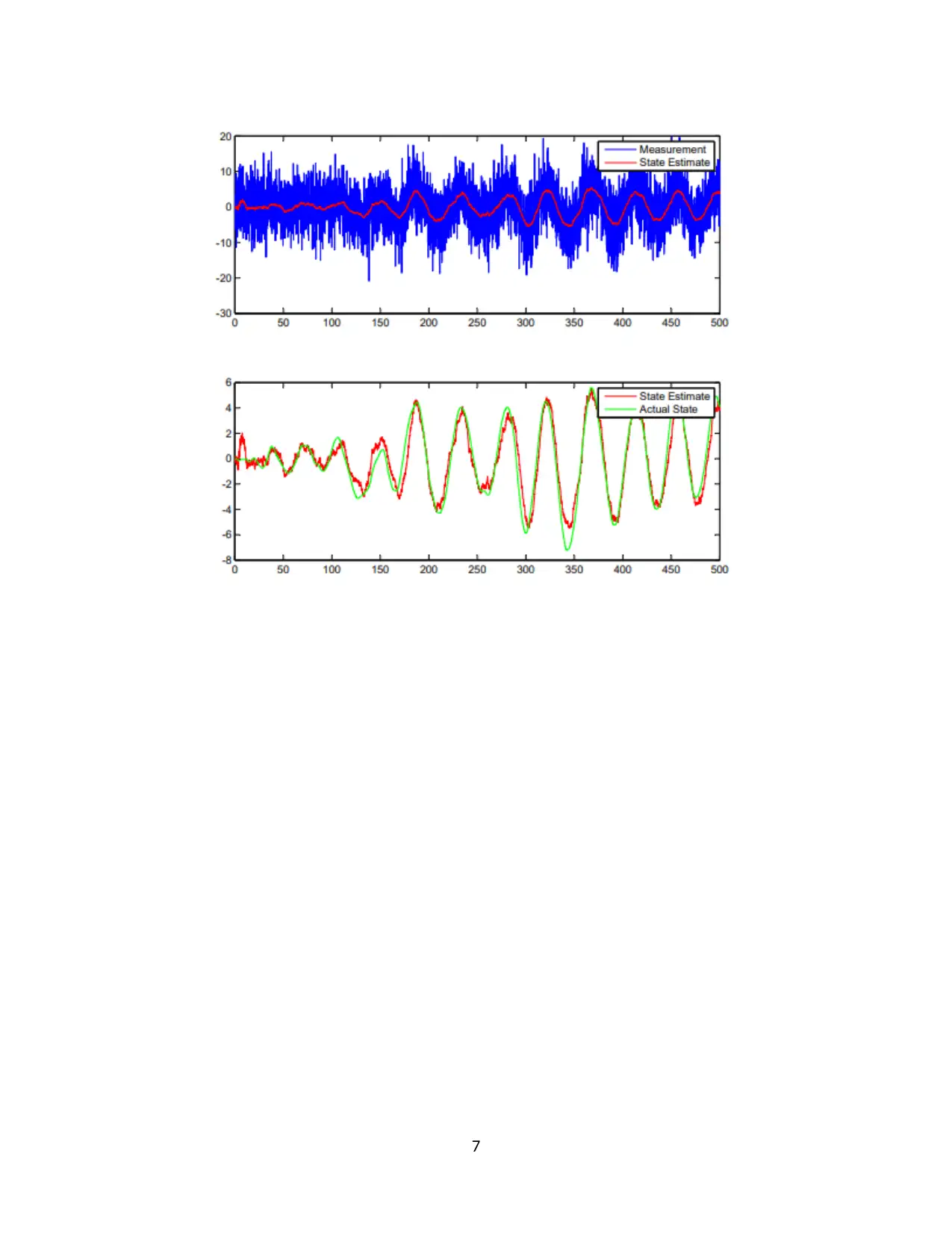
This document presents a comprehensive solution to the MEEM 5715 Linear Systems final exam, focusing on a base excitation system. The solution begins with the continuous state space model, defining system parameters like sprung mass, damping coefficient, and stiffness, and provides the governing equation. It includes MATLAB implementations for state space modeling and transfer function analysis. The solution then covers the discretization of the model using the Euler method and MATLAB's c2d function, converting the continuous transfer function to a discrete one. Step responses for force and disturbance inputs are determined and visualized. The document continues with the simulation of the system using a discrete Kalman filter, outlining the linear system equations and matrix notation. Finally, the linear quadratic regulation (LQR) method is applied to determine the state-feedback control gain and plot the step response of the LQR output. The solution includes detailed explanations, MATLAB code snippets, and graphical representations to facilitate understanding of the concepts and methodologies used.


1 out of 8

Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.