Mobile Robotics: Kinematics Models, IST Portugal, 2002
VerifiedAdded on 2021/10/01
|16
|2041
|182
Homework Assignment
AI Summary
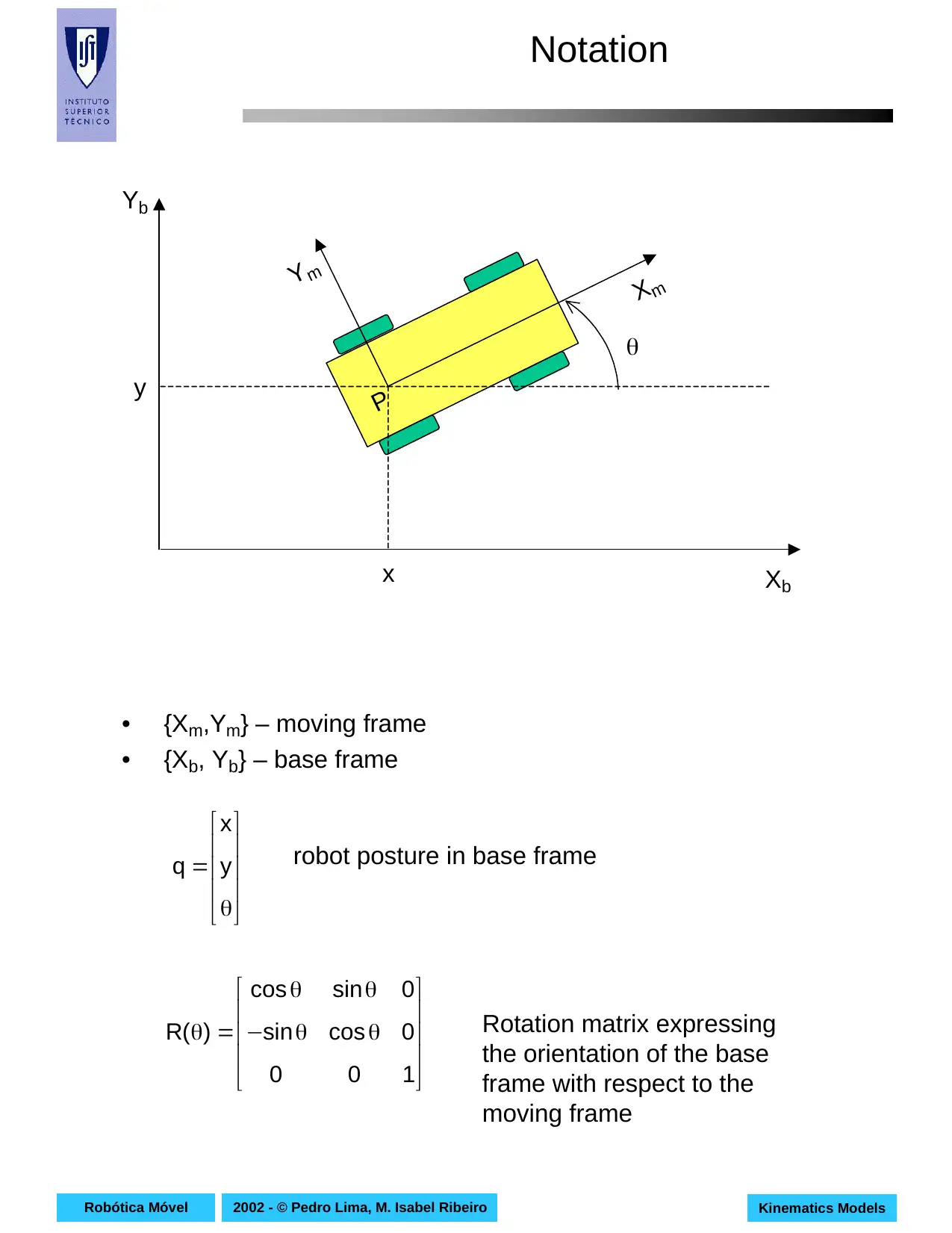
This document presents a comprehensive overview of kinematics models for mobile robots, focusing on the mathematical relationships governing their motion without considering the forces involved. It begins by defining kinematics and its distinction from dynamics, emphasizing the importance of these models in understanding robot locomotion. The paper then delves into specific kinematic models for wheeled mobile robots, including differential drive, synchronous drive, tricycle, and omnidirectional robots. For each model, the document provides detailed explanations, diagrams, equations, and control variables, including the kinematic models in both the robot frame and the world frame, along with particular cases and applications. The content references key concepts like the instantaneous center of curvature (ICC) and explores how different configurations affect robot movement, making it a valuable resource for students in robotics and related fields. The document offers a deep dive into the mathematical and geometric principles underlying mobile robot movement and control.
1 out of 16
Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.