Math 3001 Assignment 2: In-Depth Investigation of Two Functions
VerifiedAdded on 2022/10/02
|12
|778
|402
Project
AI Summary
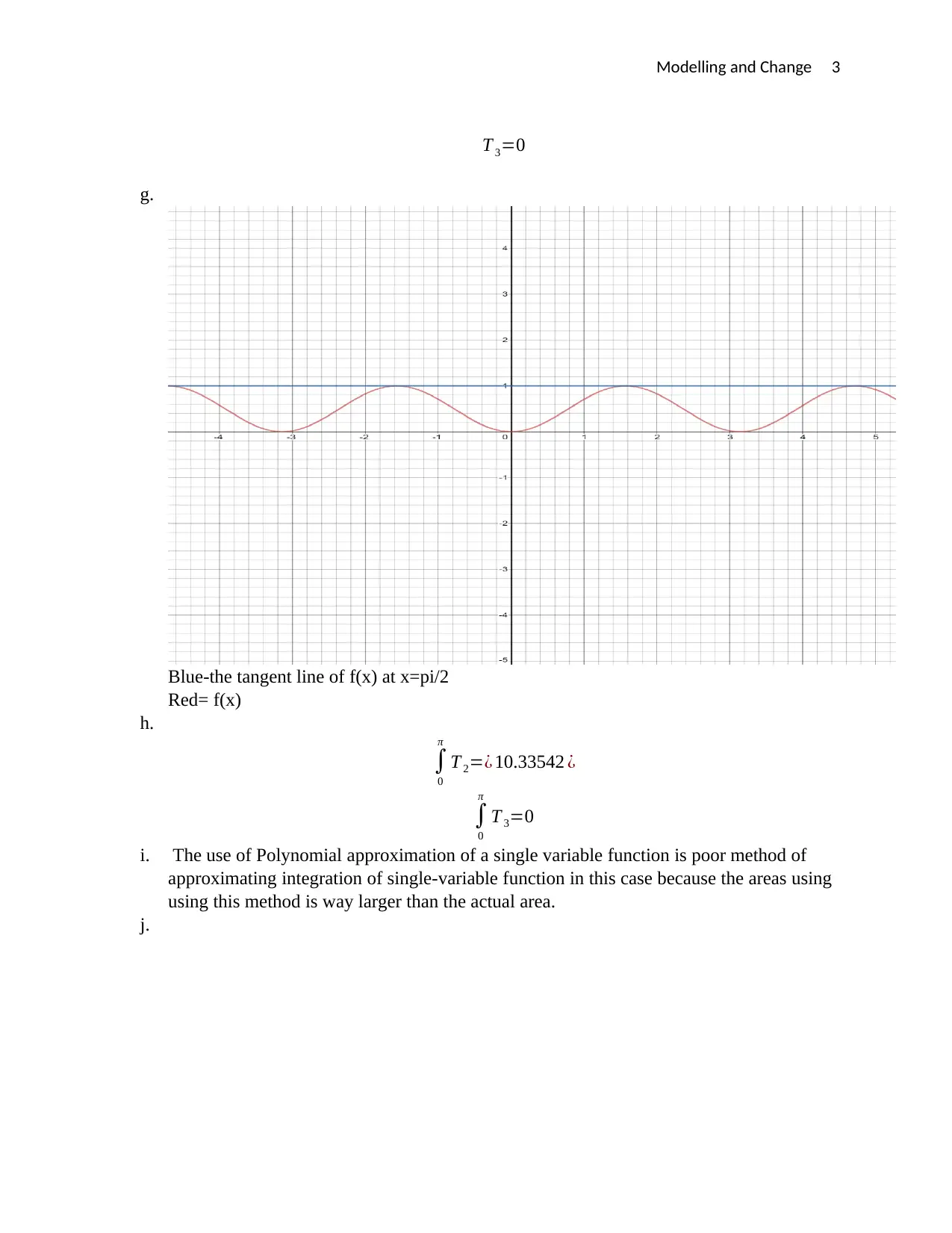
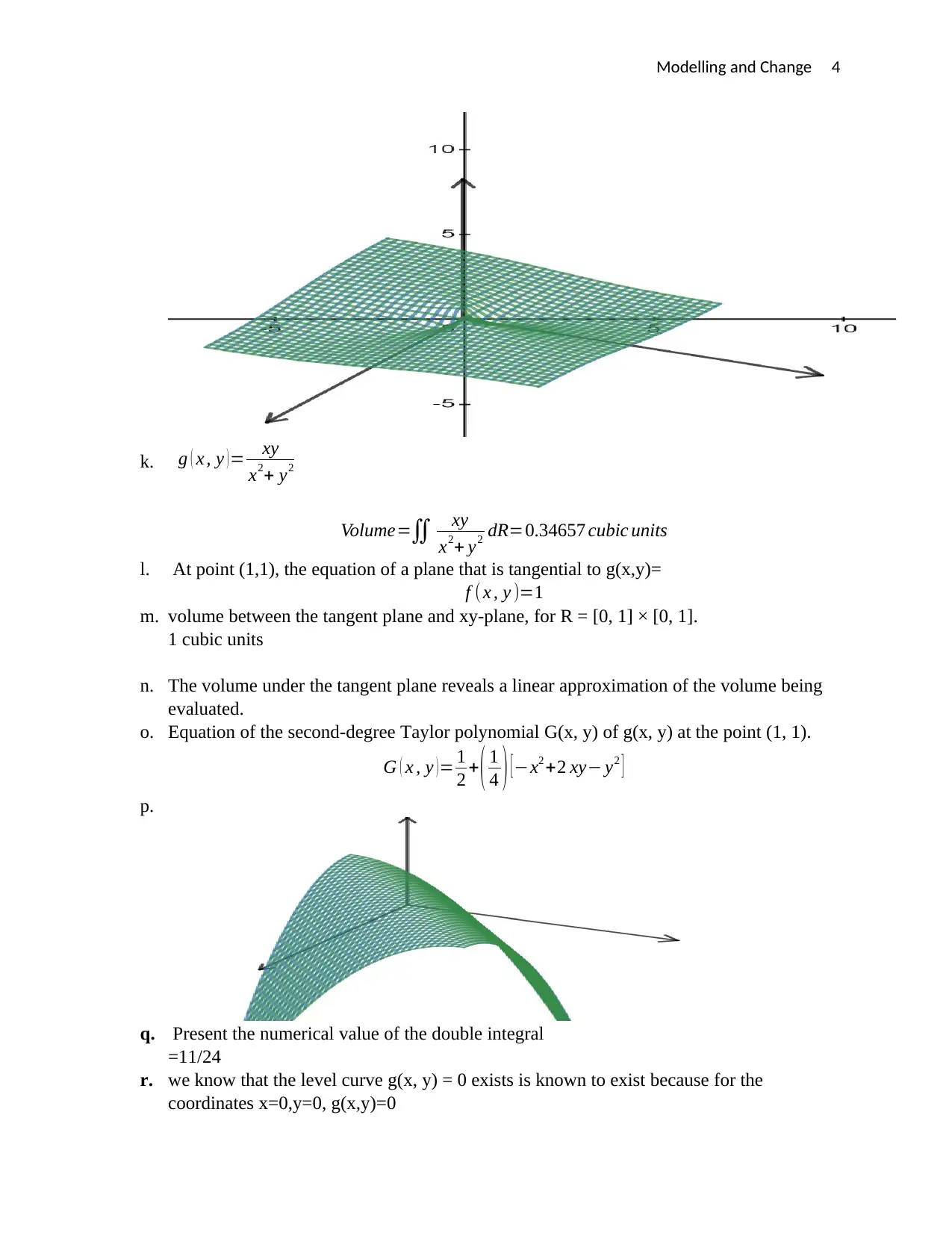
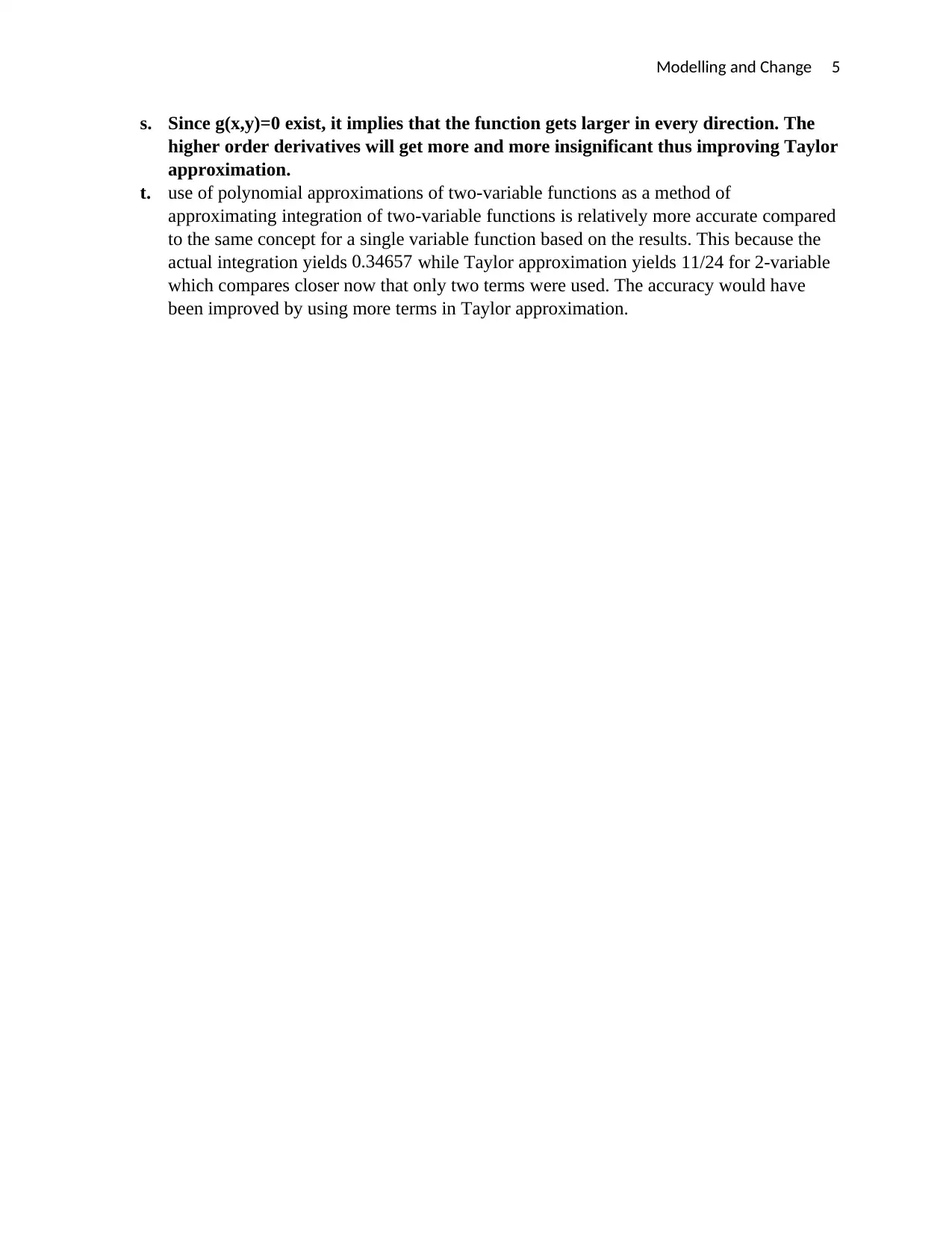
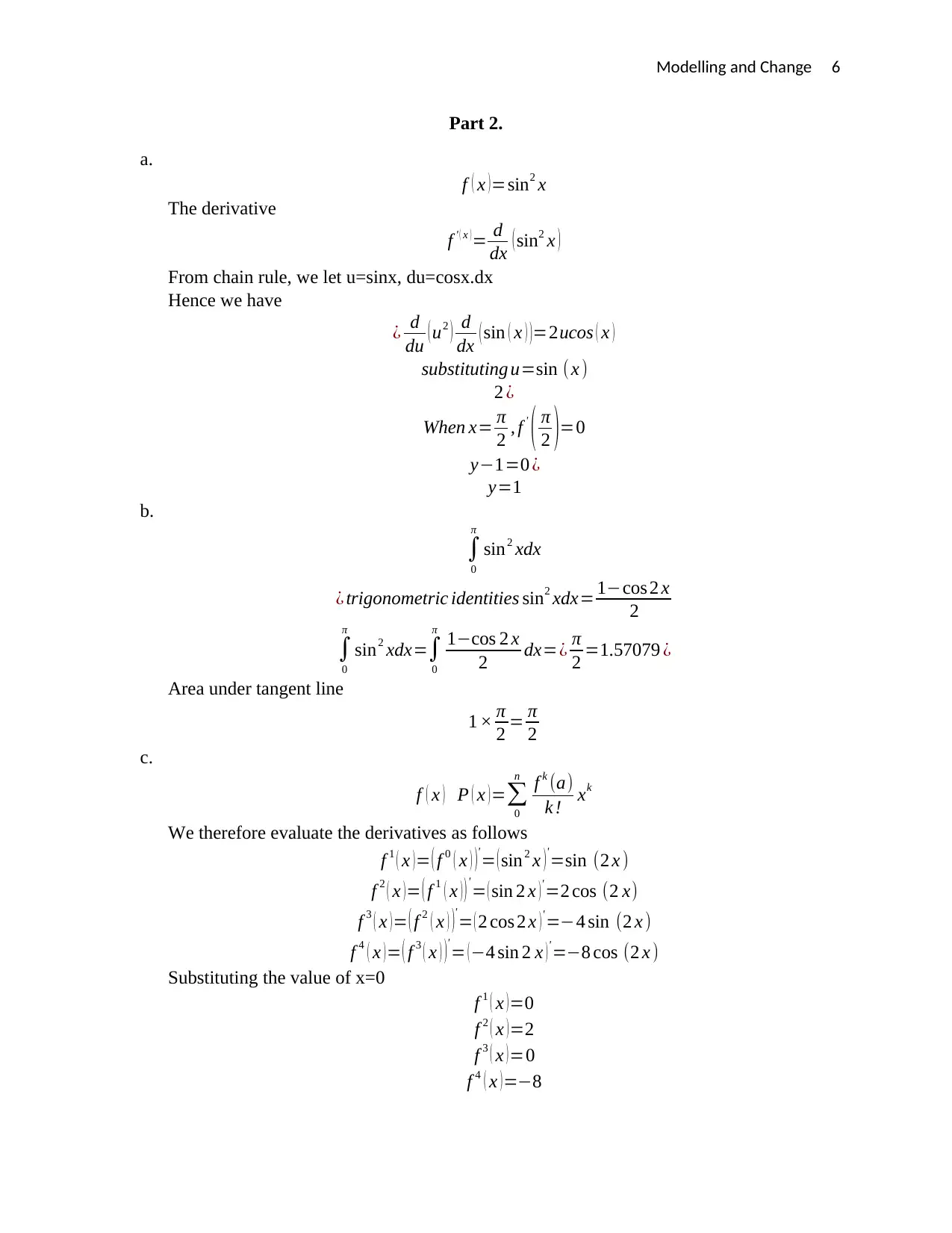
This assignment solution for Math 3001, "Modelling and Change (Advanced Level)", delves into the in-depth investigation of two functions: f(x) = sin^2(x) and g(x, y) = x^2 - xy + y^2. Part 1 explores the use of tangent lines, planes, and Taylor polynomials for approximate integration, analyzing the areas and volumes derived from these methods. It contrasts the accuracy of polynomial approximations for single and two-variable functions, presenting numerical values and equations for tangent lines and planes. Part 2 focuses on calculating derivatives using the chain, quotient, and product rules. The solution provides detailed steps for evaluating derivatives, finding equations for tangent lines, and constructing Taylor series approximations. The assignment concludes with references to relevant calculus and advanced mathematics resources.





1 out of 12
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.