Modern Control Theory: State Space, Transfer Functions, and Simulink
VerifiedAdded on 2023/05/30
|7
|849
|487
Homework Assignment
AI Summary
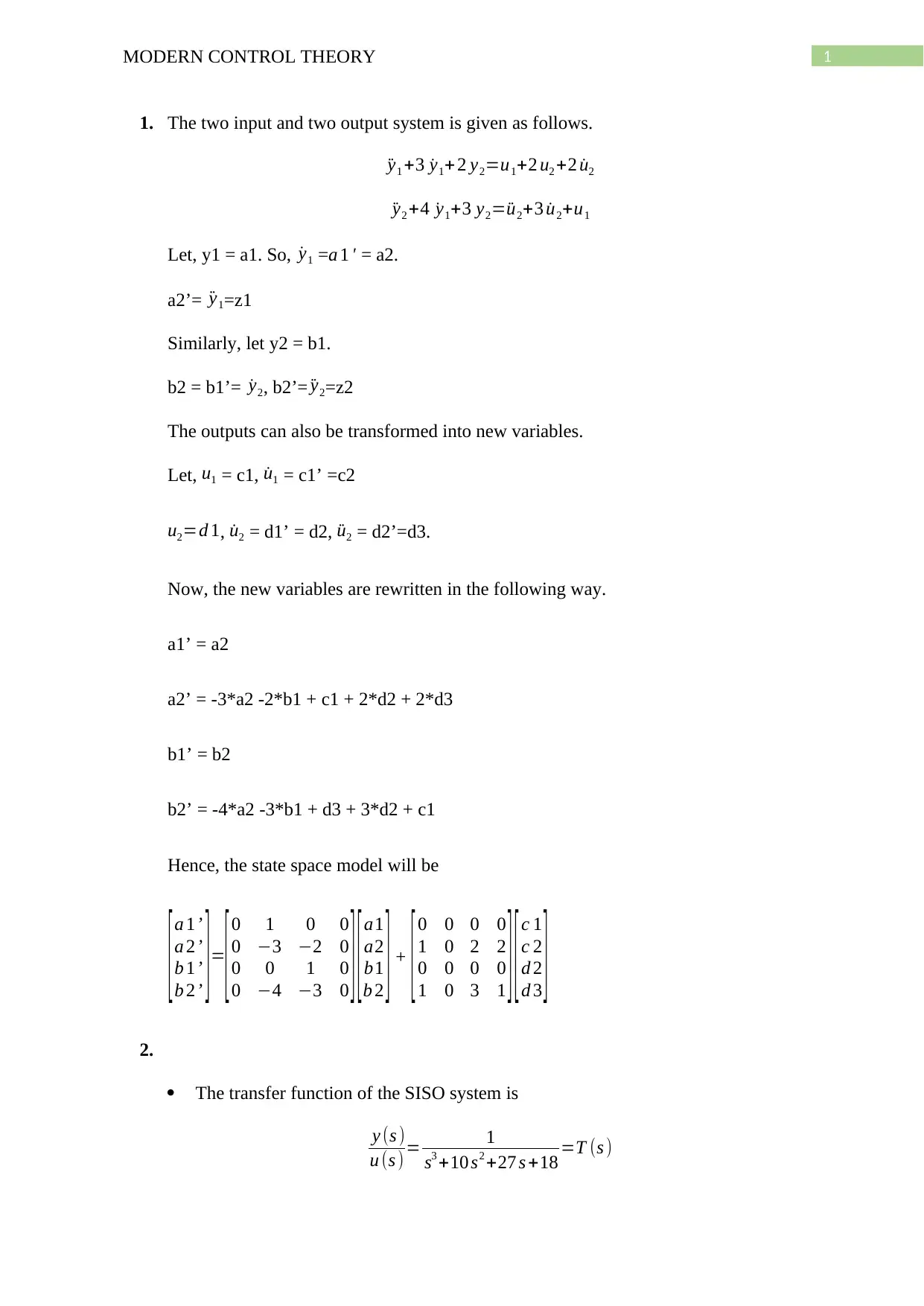
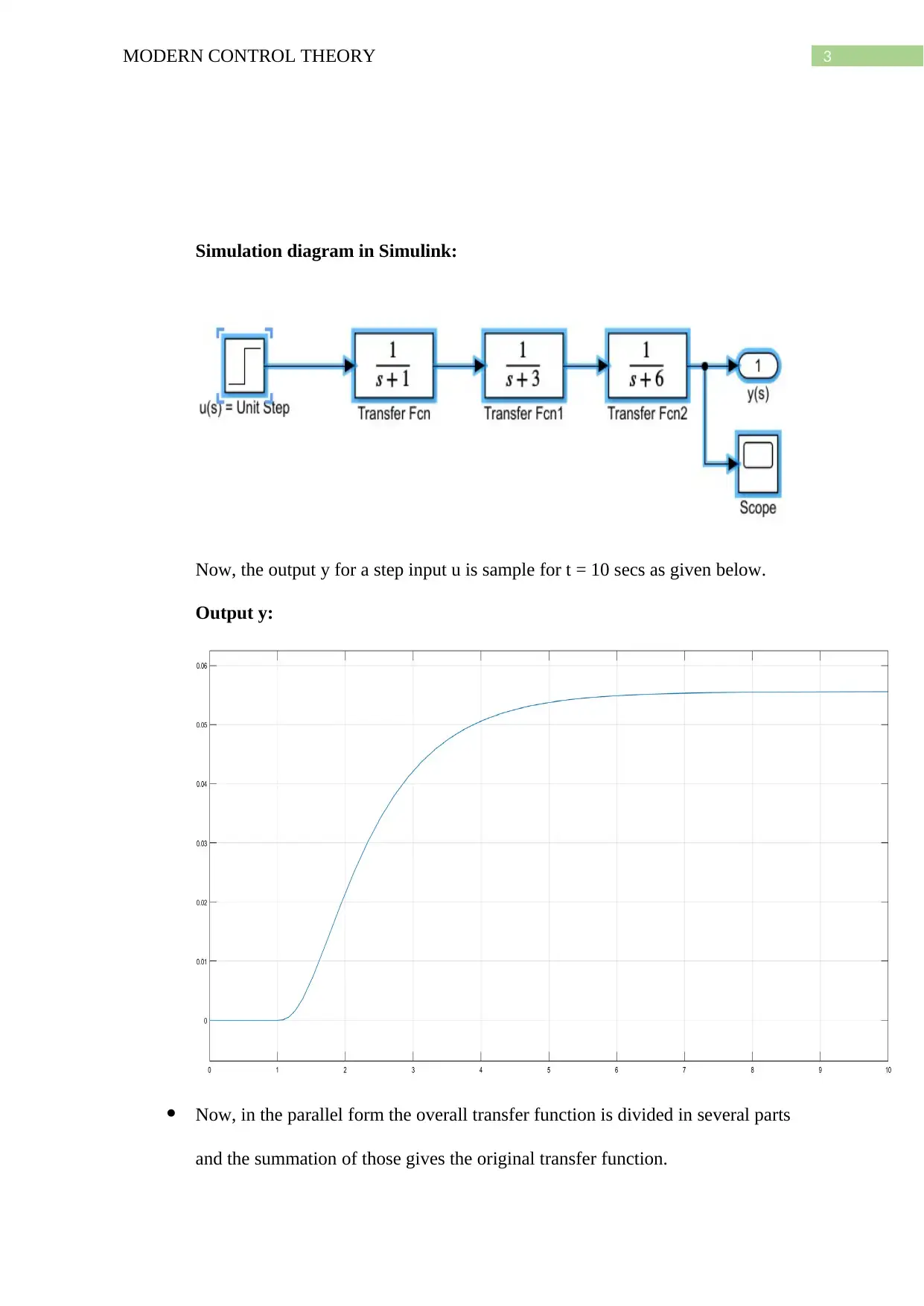
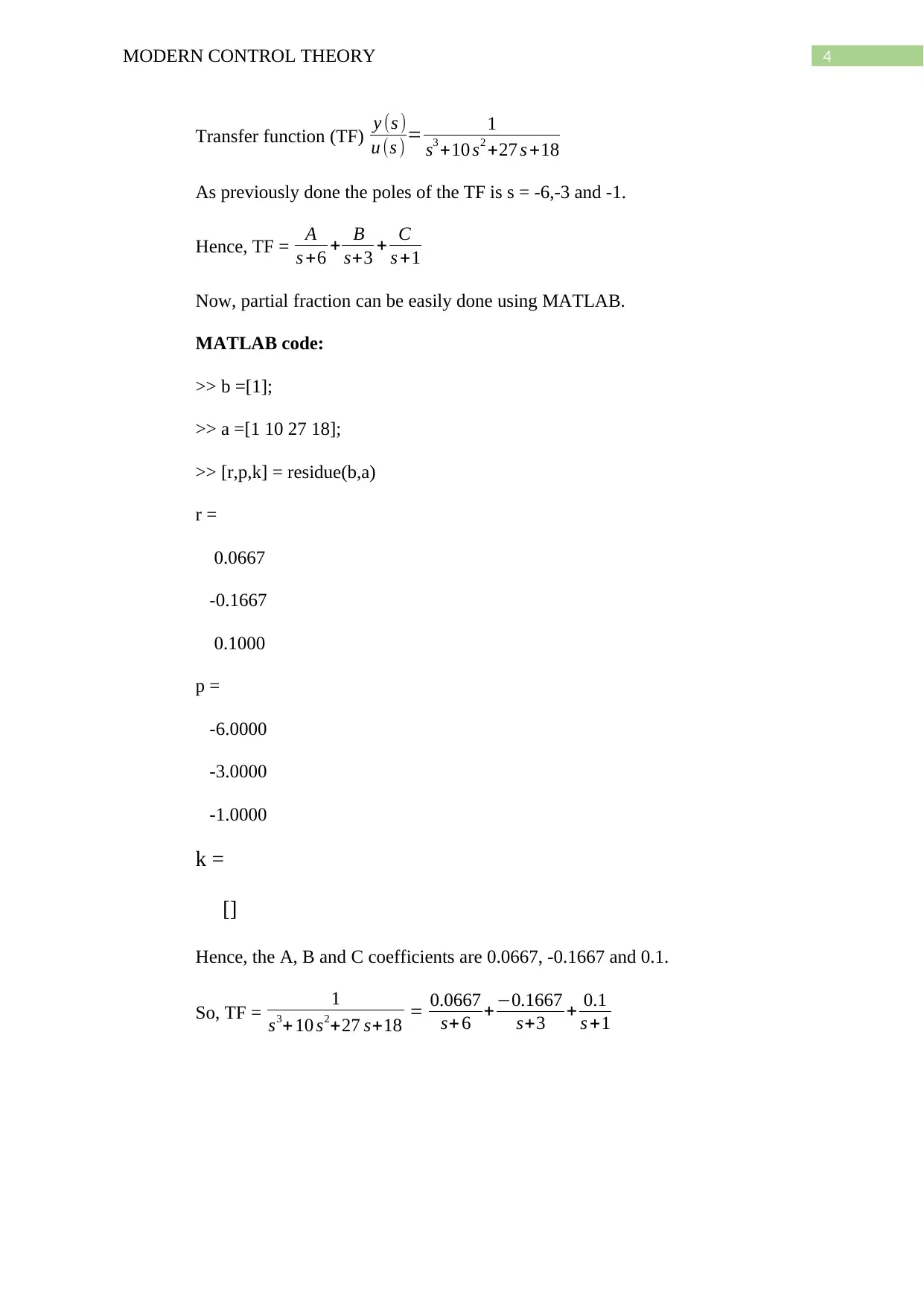
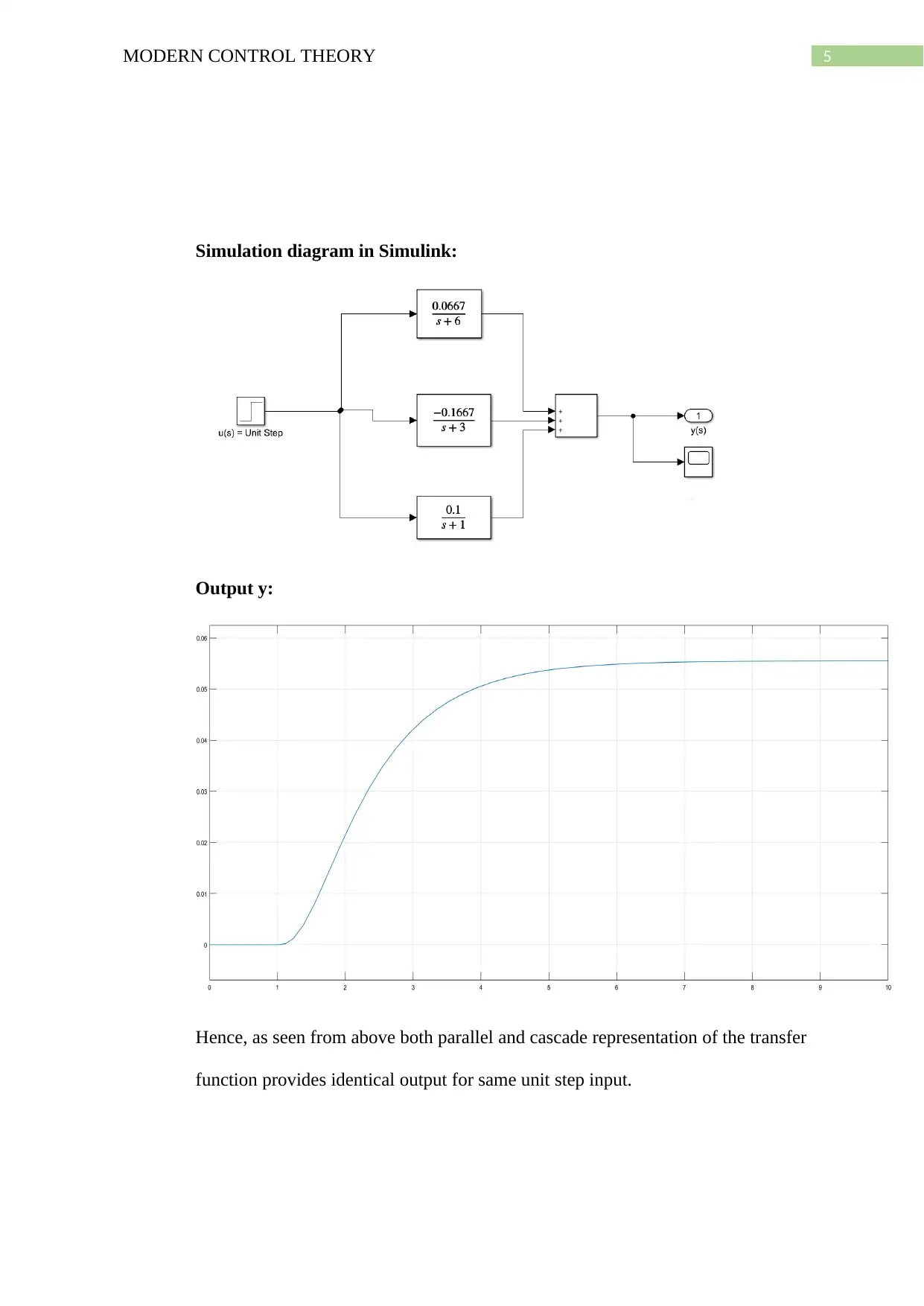
This document provides a comprehensive solution to a Modern Control Theory homework assignment. The solution begins by deriving state-space equations for a two-input, two-output system. It then focuses on a single-input, single-output (SISO) system, deriving state-space equations in controllable canonical form. Furthermore, the assignment explores the factored (cascade) and parallel forms of the transfer function, including the derivation of the state-space representation and Simulink simulation diagrams for each form. The document includes MATLAB code for partial fraction decomposition and presents the output responses for a step input, comparing the results of the parallel and cascade forms to demonstrate their equivalence.



1 out of 7
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.