Modern Control Theory Project: Investigating Pole and Zero Effects
VerifiedAdded on 2023/06/04
|14
|2164
|392
Project
AI Summary
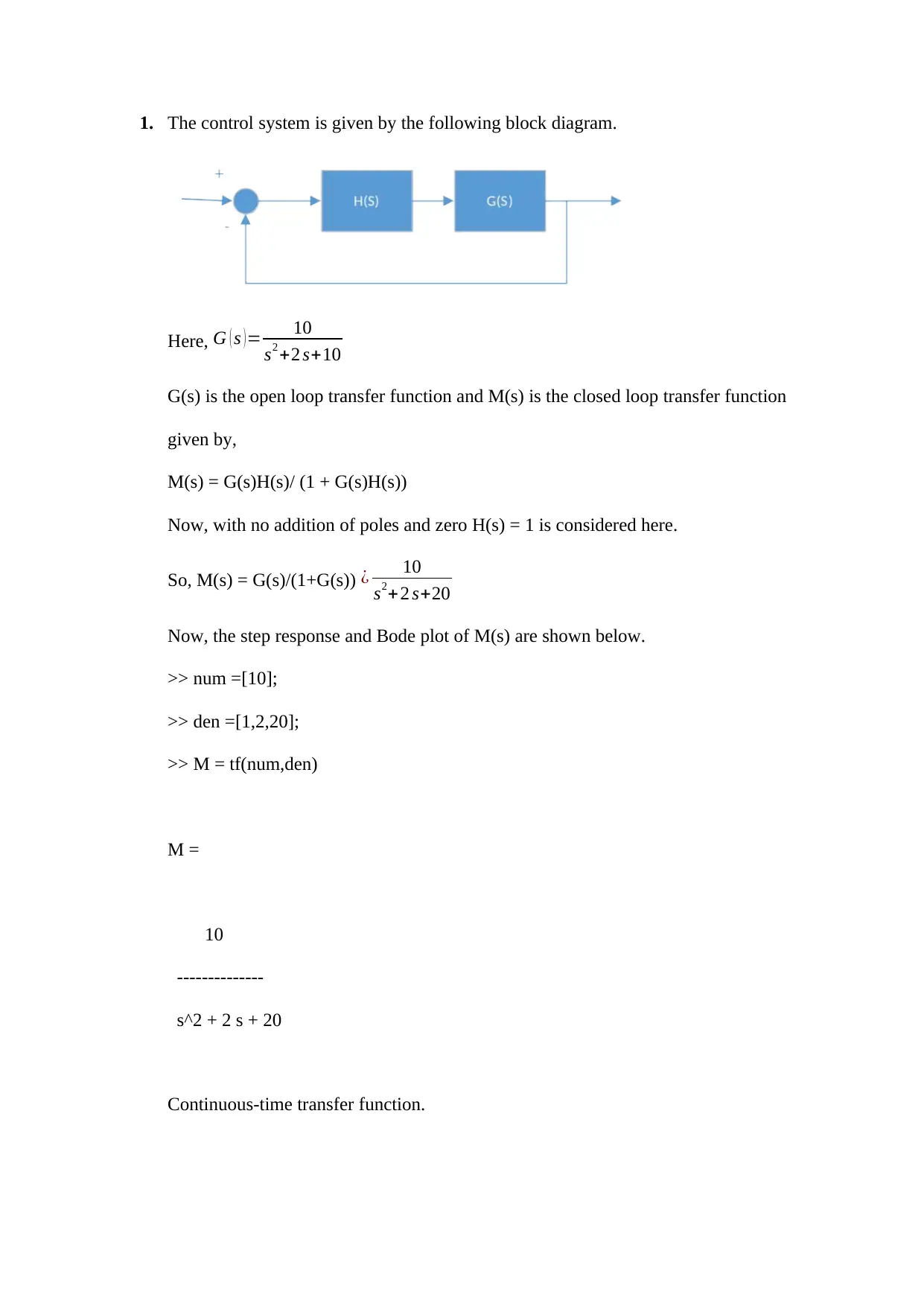
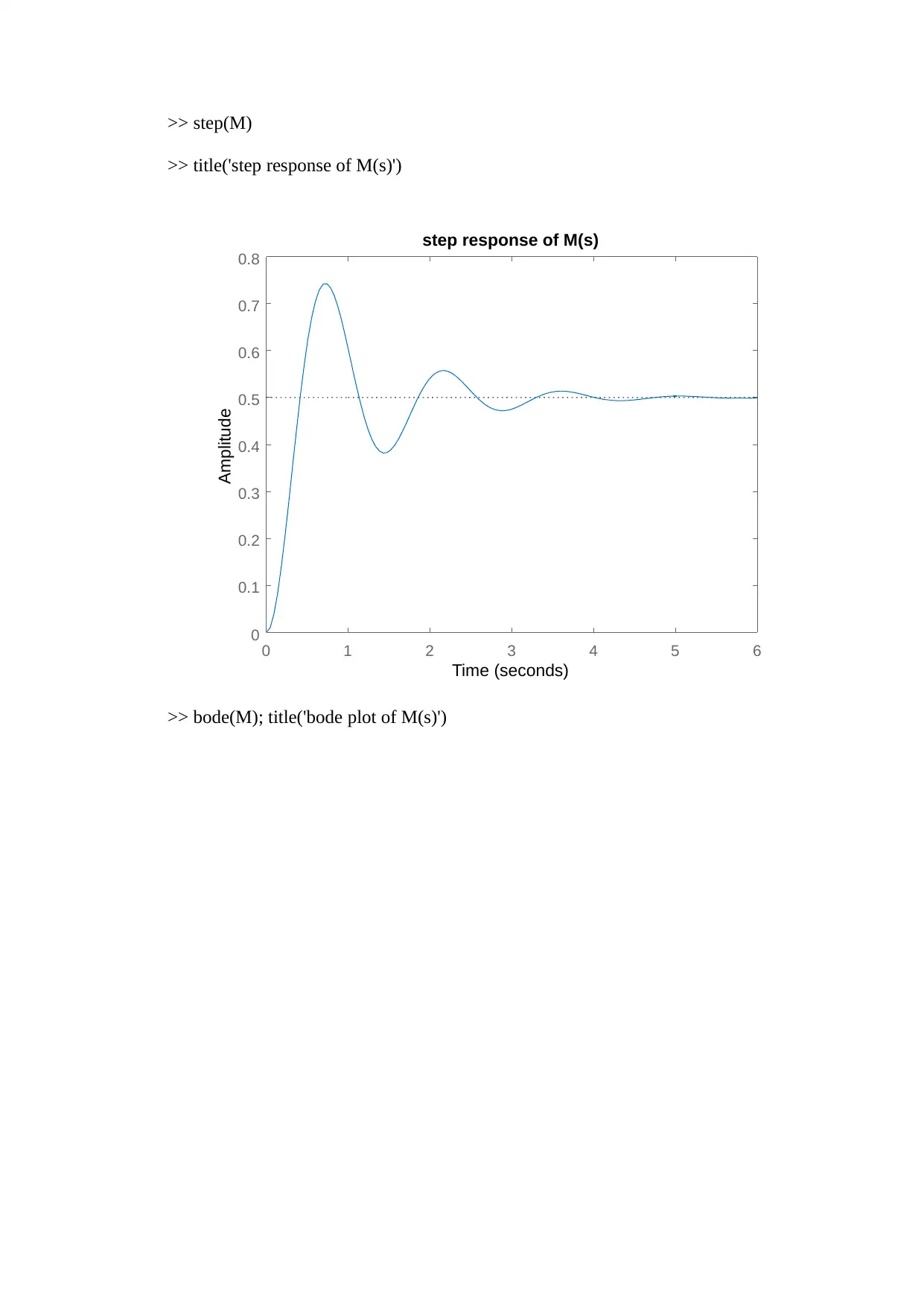
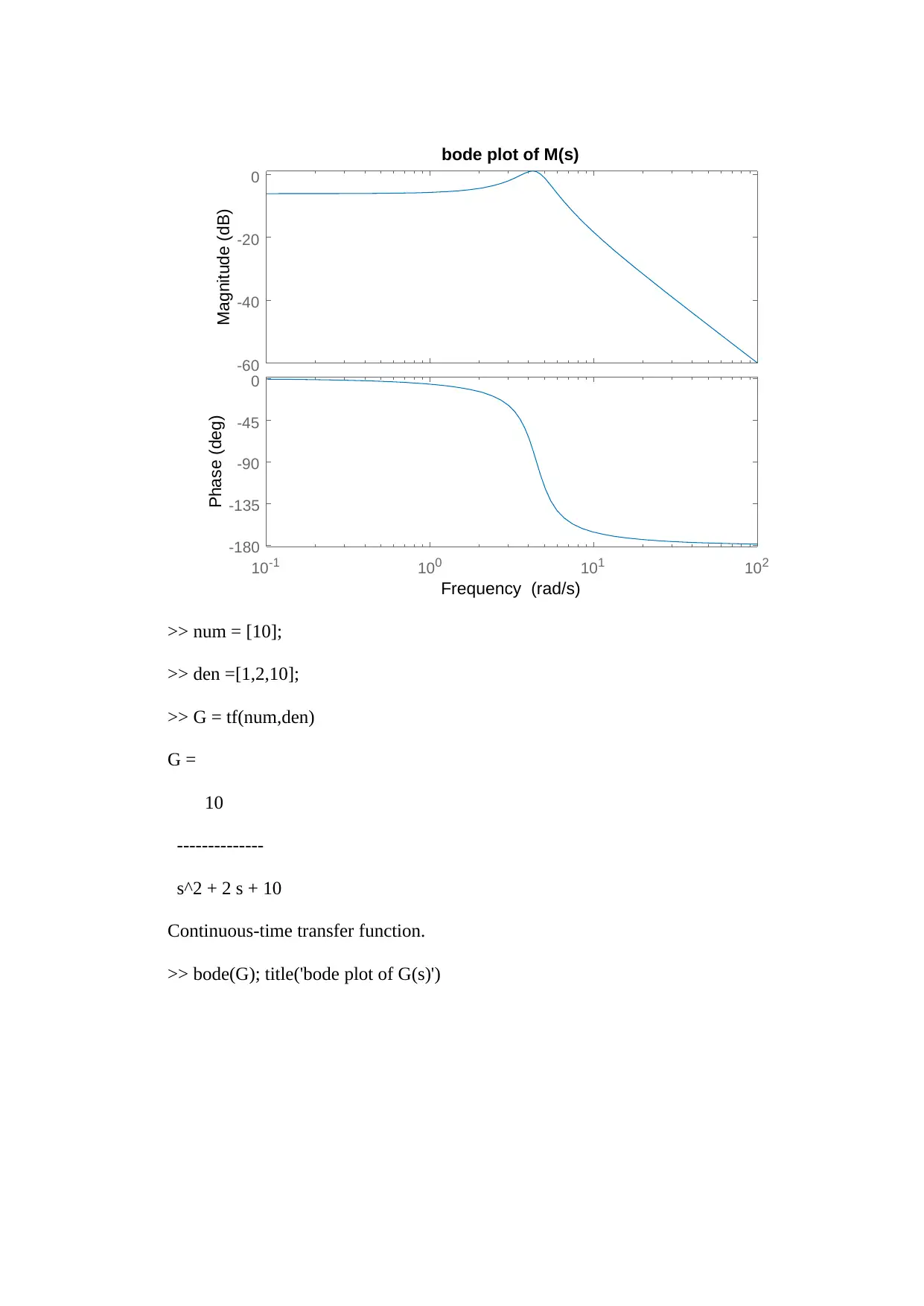
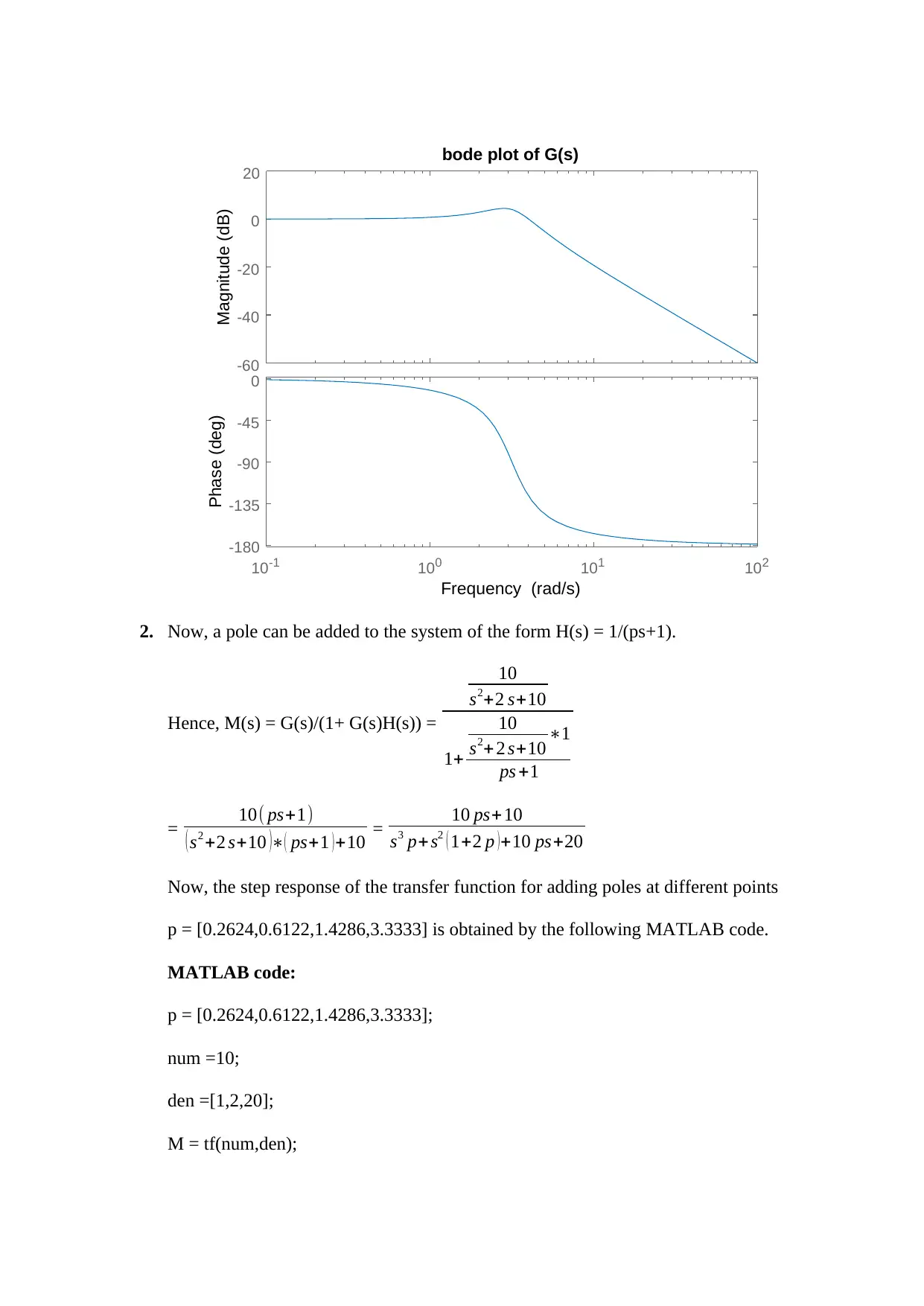
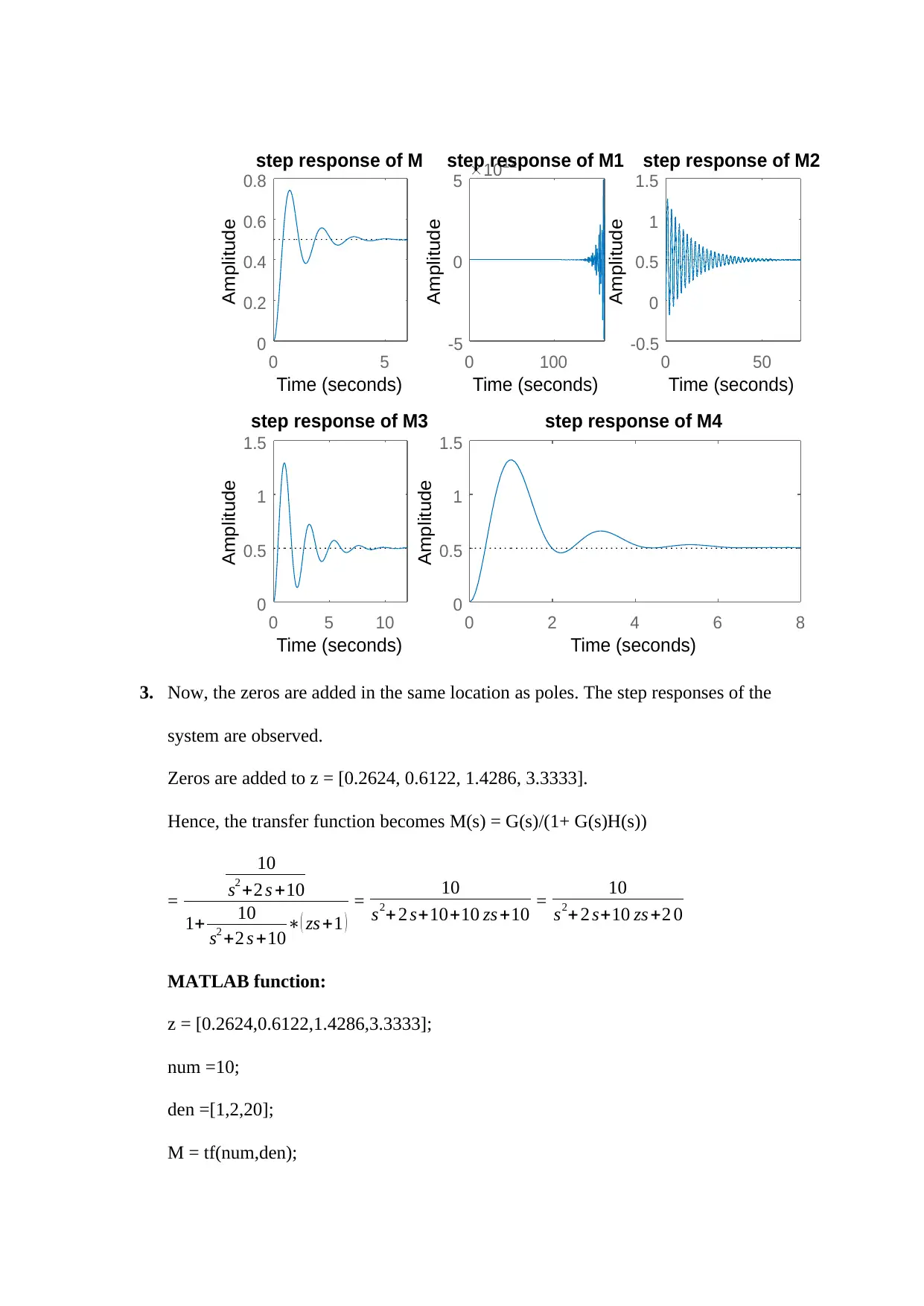
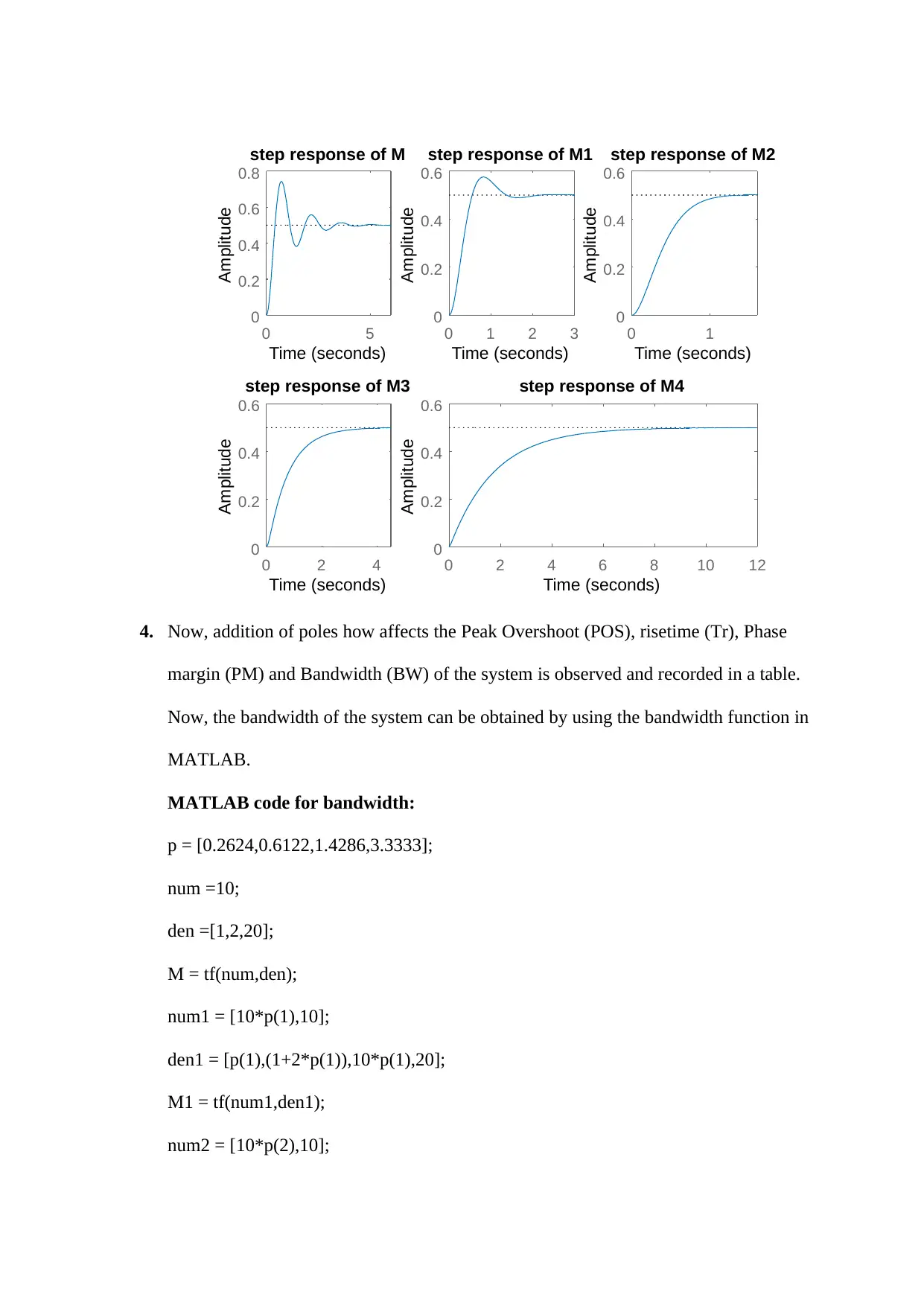
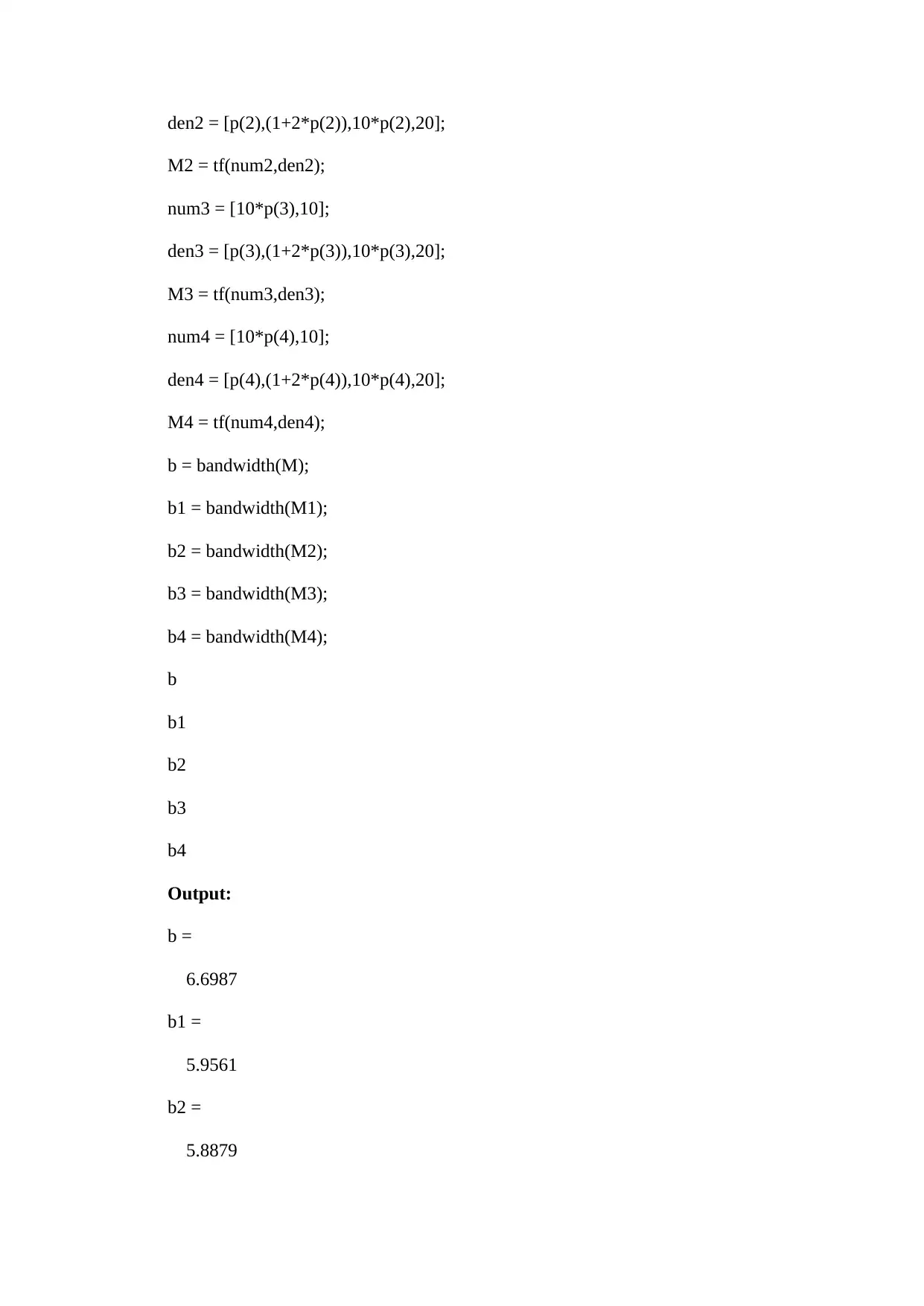
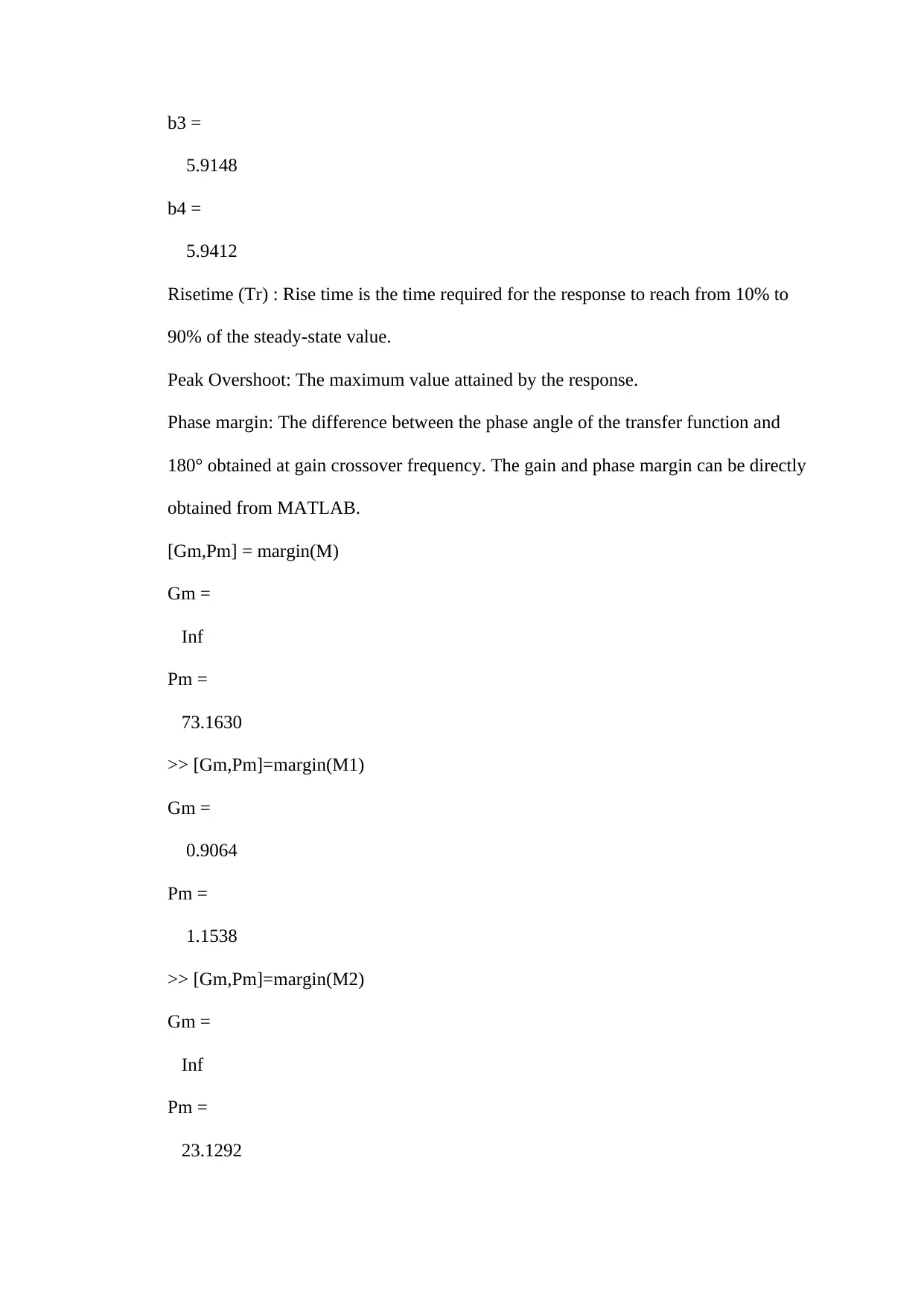
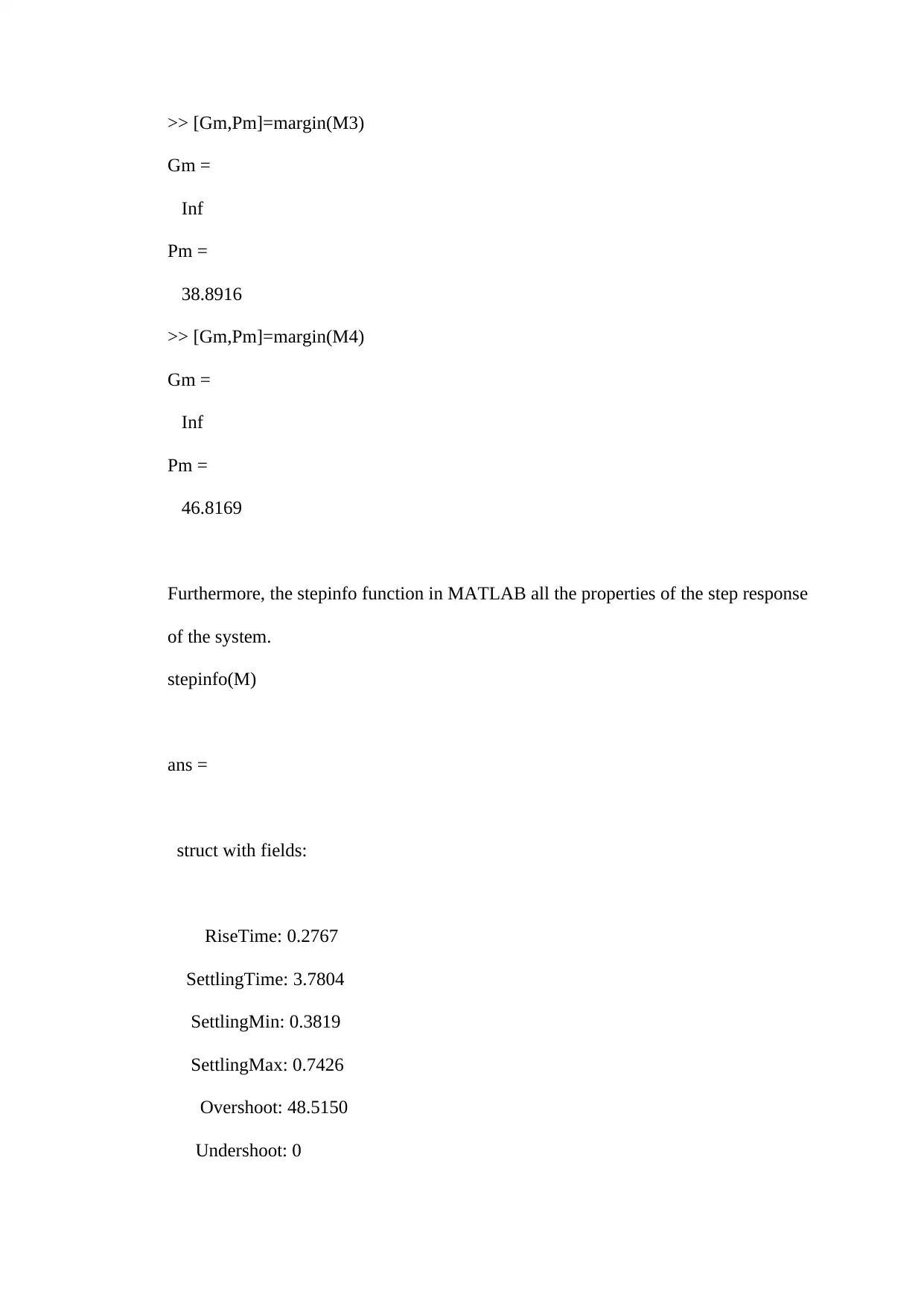
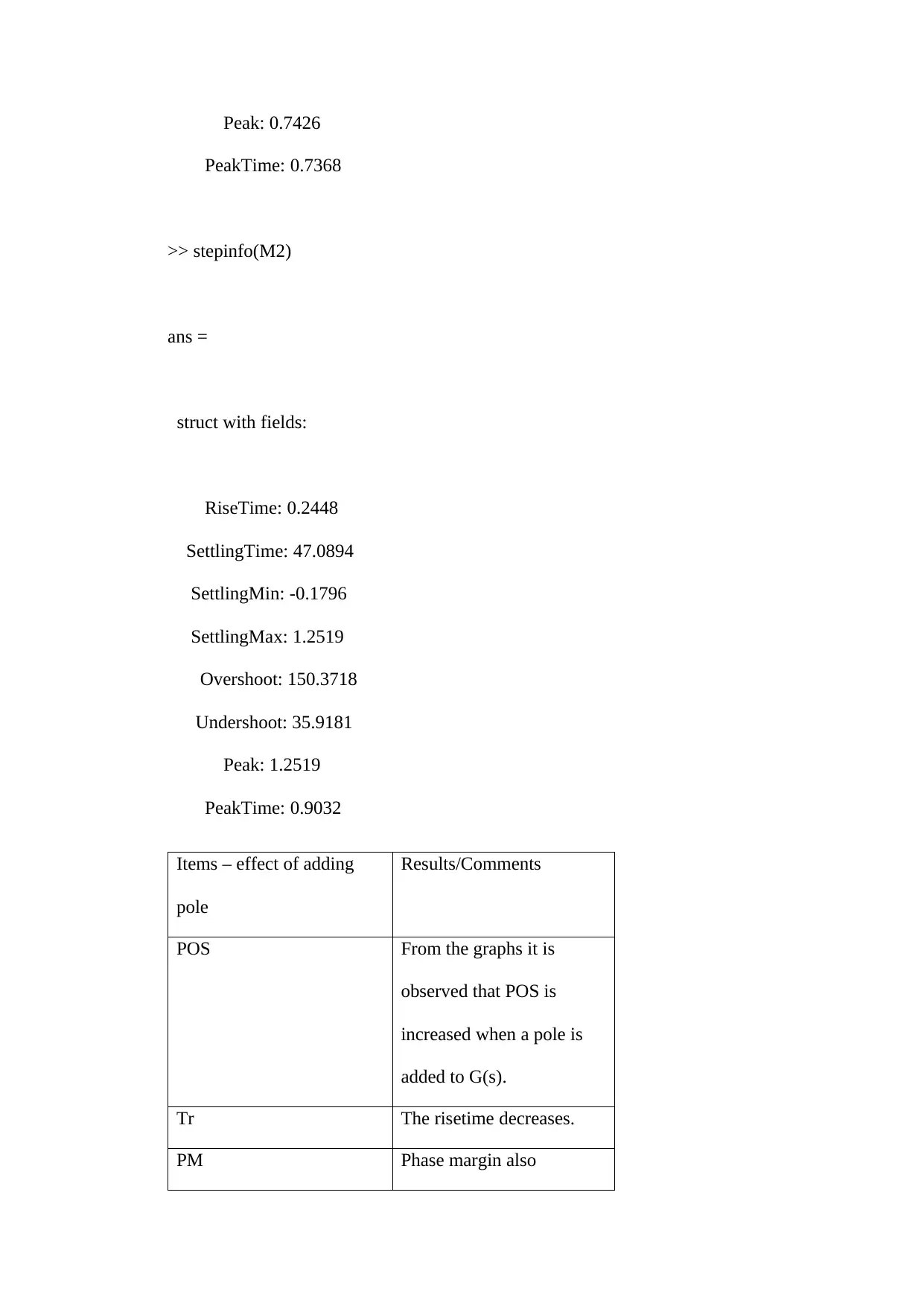
This project analyzes the effects of adding poles and zeros to a second-order transfer function within a control system. The project utilizes MATLAB to simulate and analyze the impact of these additions on the system's step response, Bode plots, and key performance indicators. The analysis covers the effects of adding poles and zeros separately, examining how they influence parameters such as peak overshoot, rise time, phase margin, bandwidth, and gain crossover frequency. The project includes MATLAB code snippets, plots of step responses, Bode plots and tabular data to illustrate the observed effects and relationships between these parameters, providing a comprehensive understanding of the impact of pole and zero placement on system stability and performance. The project concludes by summarizing the observed relationships between the system properties and the addition of poles and zeros.
1 out of 14
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.