Exploring Nonlinear Approximation Techniques and Their Applications
VerifiedAdded on 2020/05/08
|8
|926
|61
AI Summary
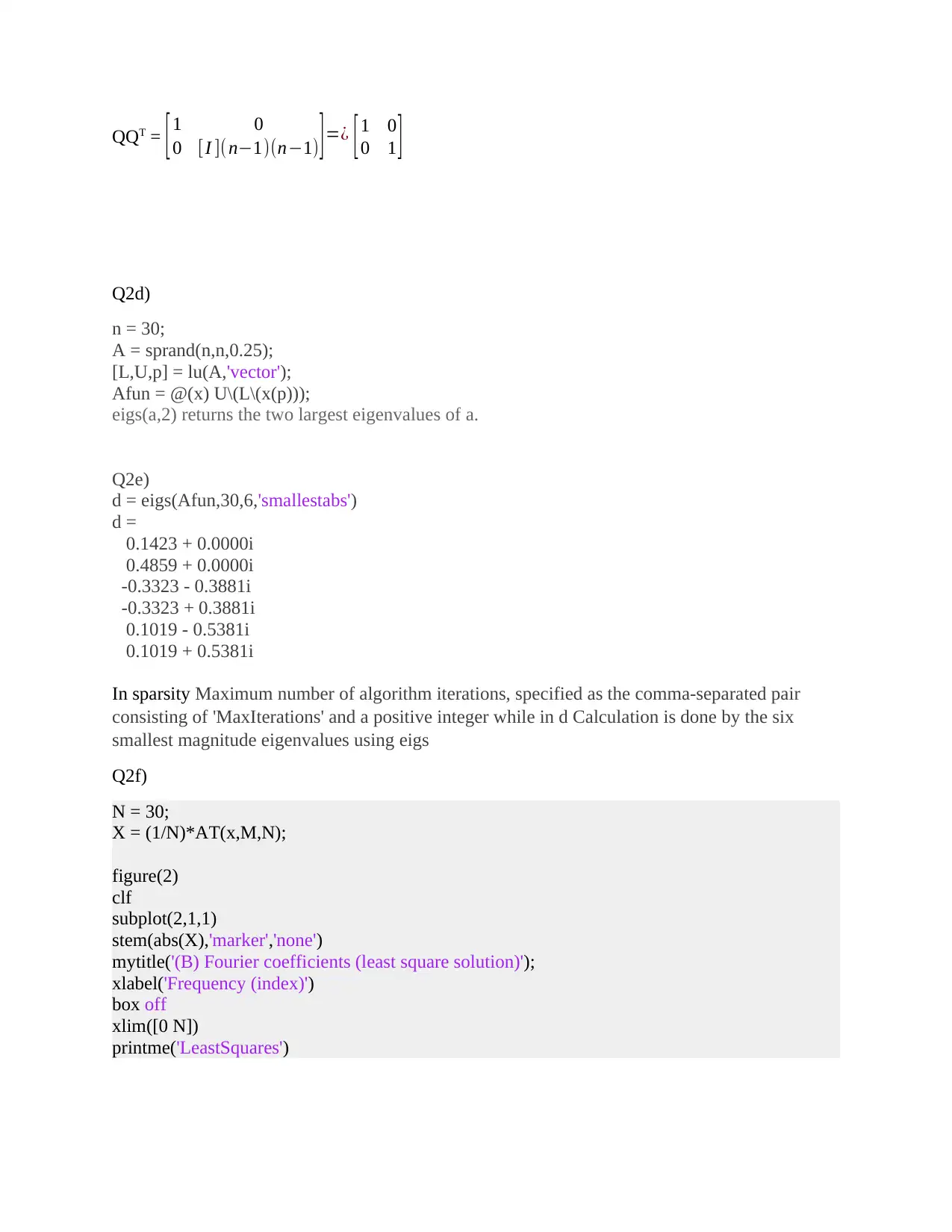
This academic exercise tackles the fundamentals of nonlinear approximation with an emphasis on achieving sparse representations in signal processing. The assignment is structured around three main questions: proving necessary conditions using Restricted Isometry Property (RIP), exploring dictionary learning via Matching Pursuit, and calculating eigenvalues for matrix approximations. MATLAB code snippets are provided to illustrate practical implementations of these theoretical concepts, culminating in applications such as least squares solutions for Fourier coefficients.



1 out of 8
Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.