Partial Differential Equations Assignment Solution, Analysis Module
VerifiedAdded on 2022/12/26
|22
|5051
|66
Homework Assignment
AI Summary
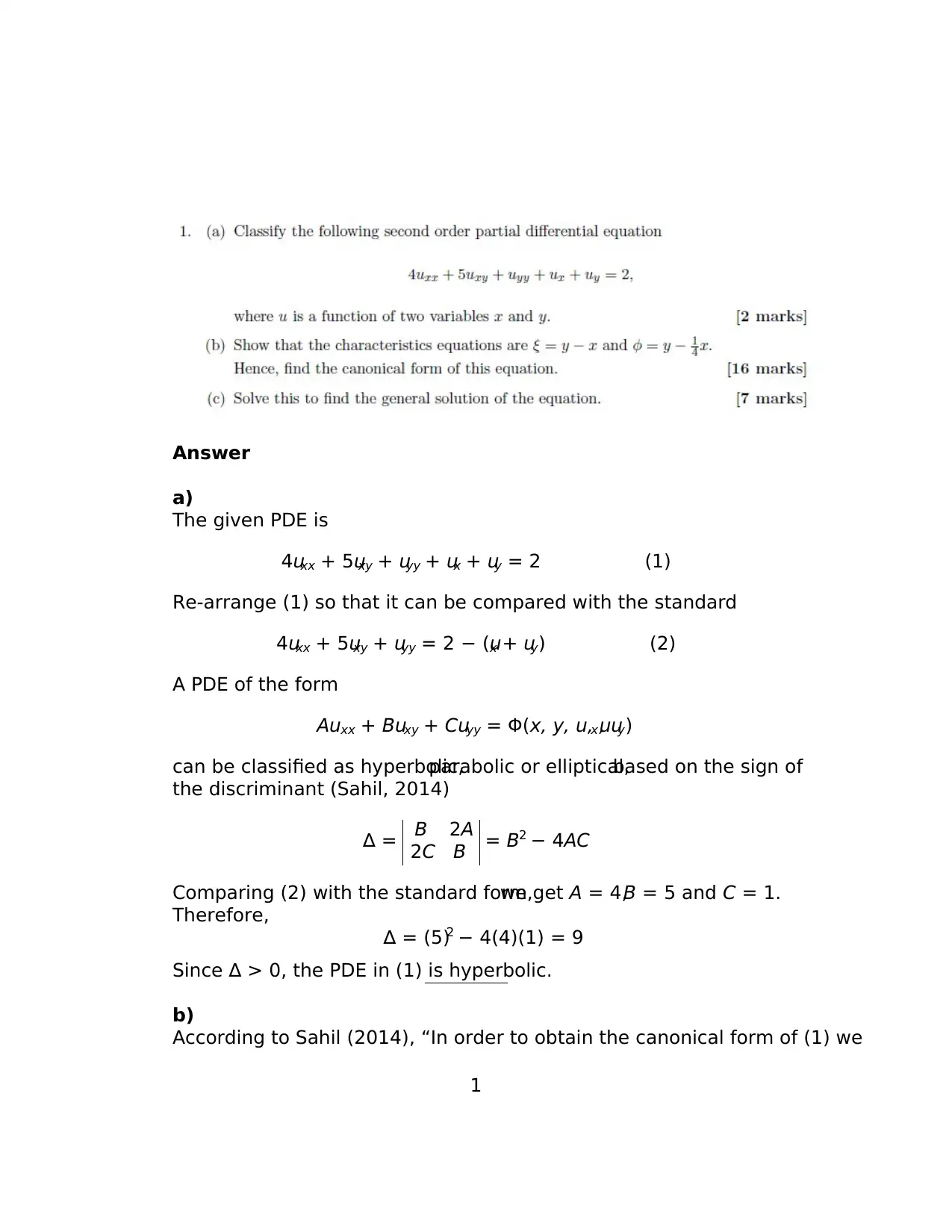
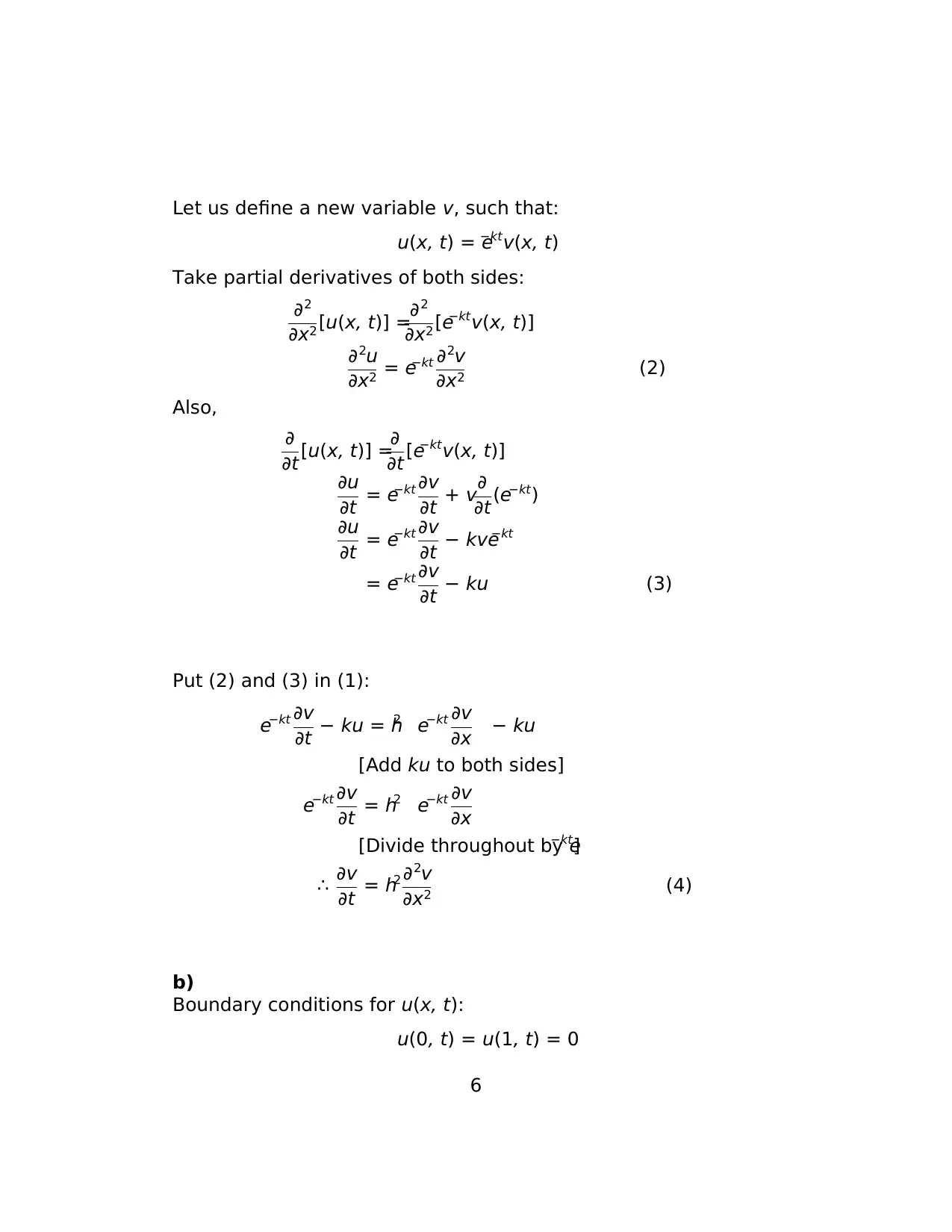
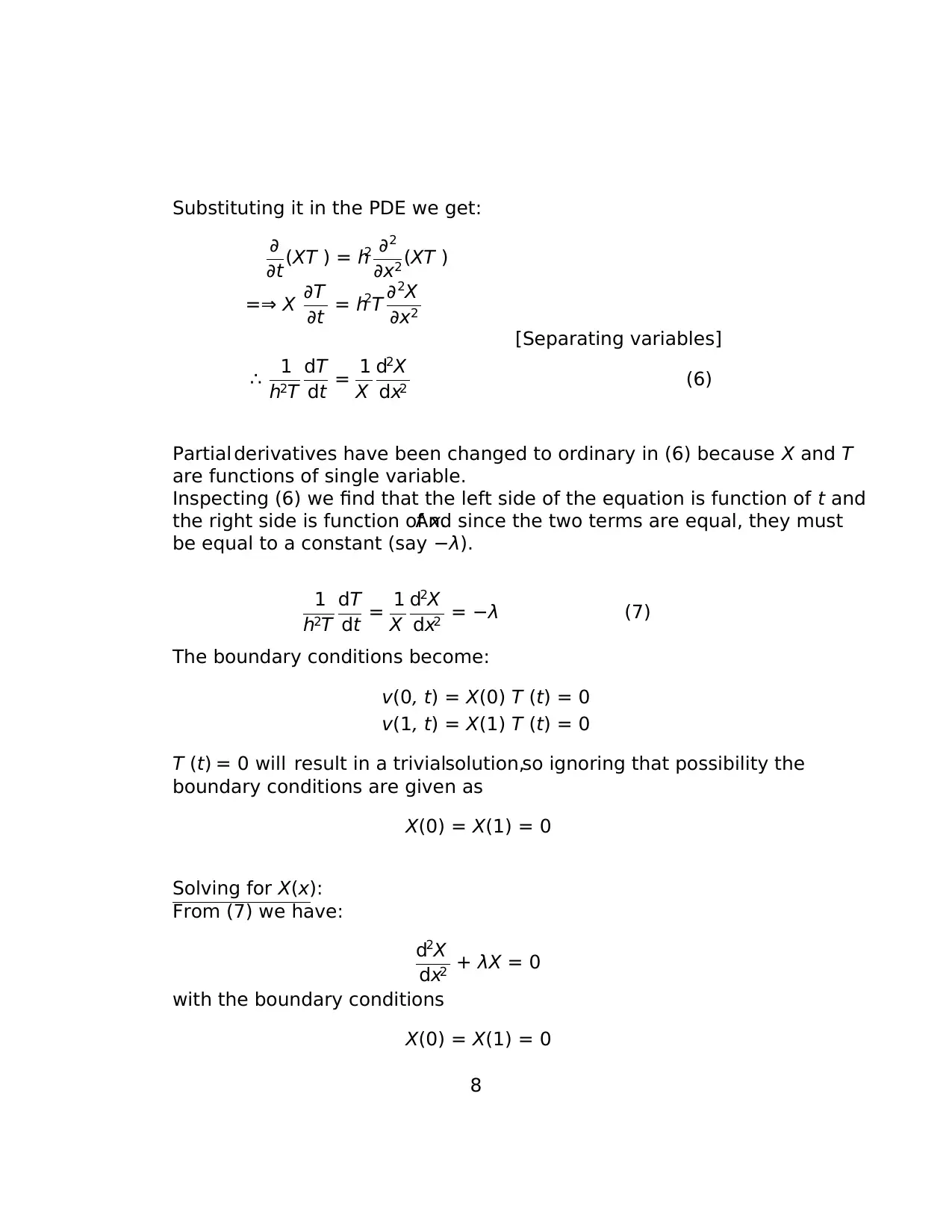
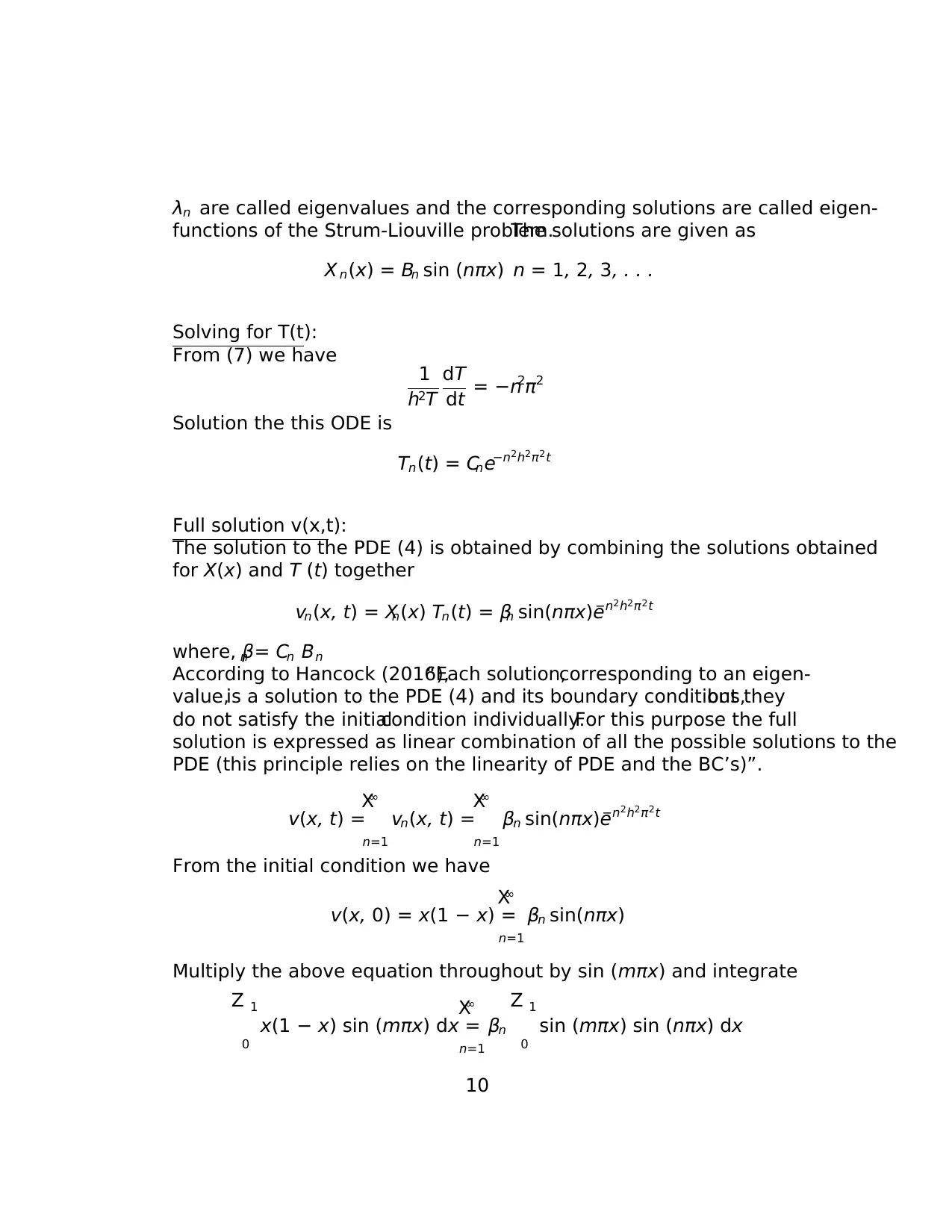
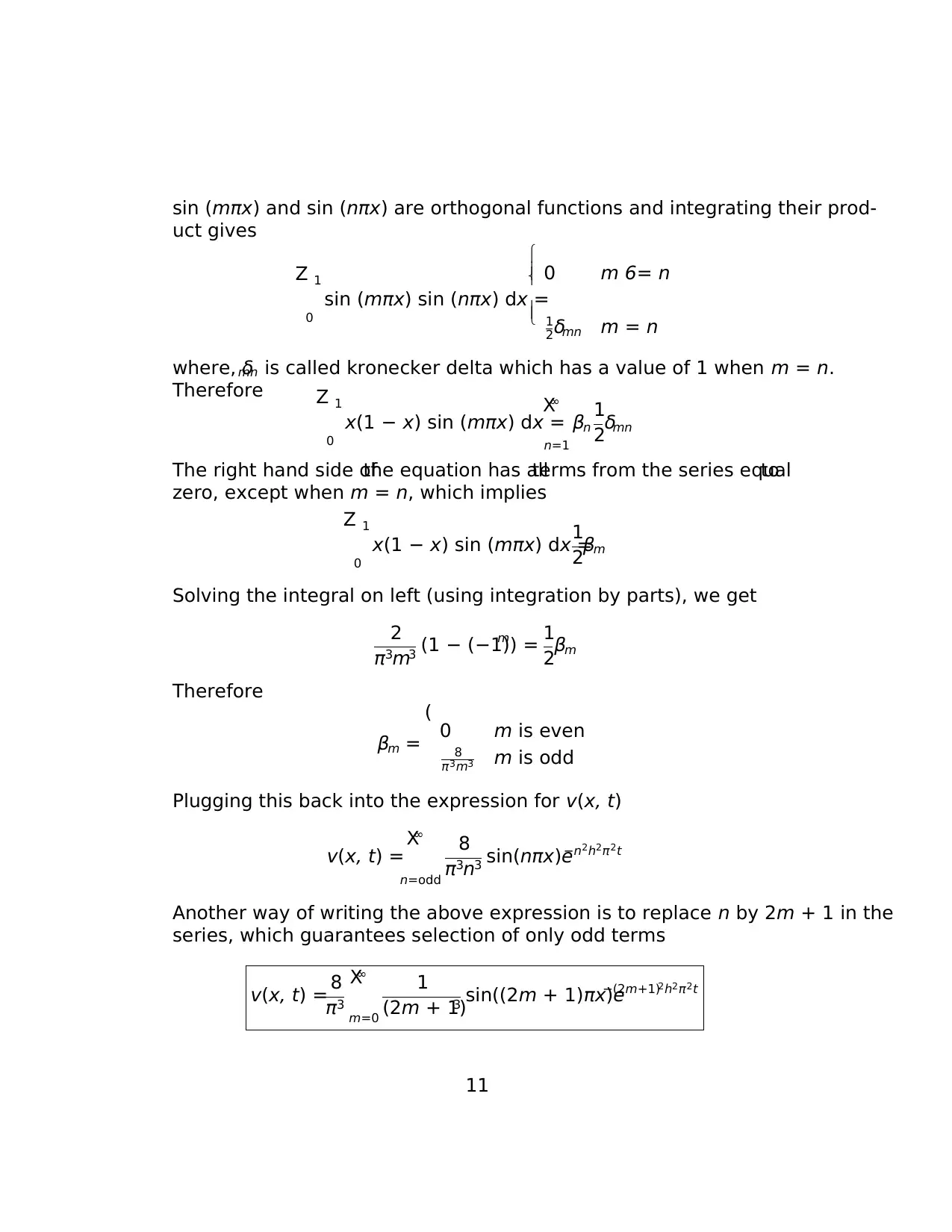
This document provides a comprehensive solution to a Partial Differential Equations (PDE) assignment. The solution addresses two main problems. The first involves classifying a given second-order PDE, determining its characteristics, finding its canonical form, and deriving the general solution. The second problem explores a heat equation with a variable transformation, deriving the boundary and initial conditions for the transformed equation. It then employs the method of separation of variables to solve the equation, including finding eigenvalues, eigenfunctions, and constructing the full solution using a linear combination of solutions to satisfy initial conditions. The assignment demonstrates a thorough understanding of PDE concepts and solution techniques.







1 out of 22
Related Documents





Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.