Comprehensive Report on PID Controllers: Functionality & Limitations
VerifiedAdded on 2023/06/11
|3
|700
|350
Report
AI Summary
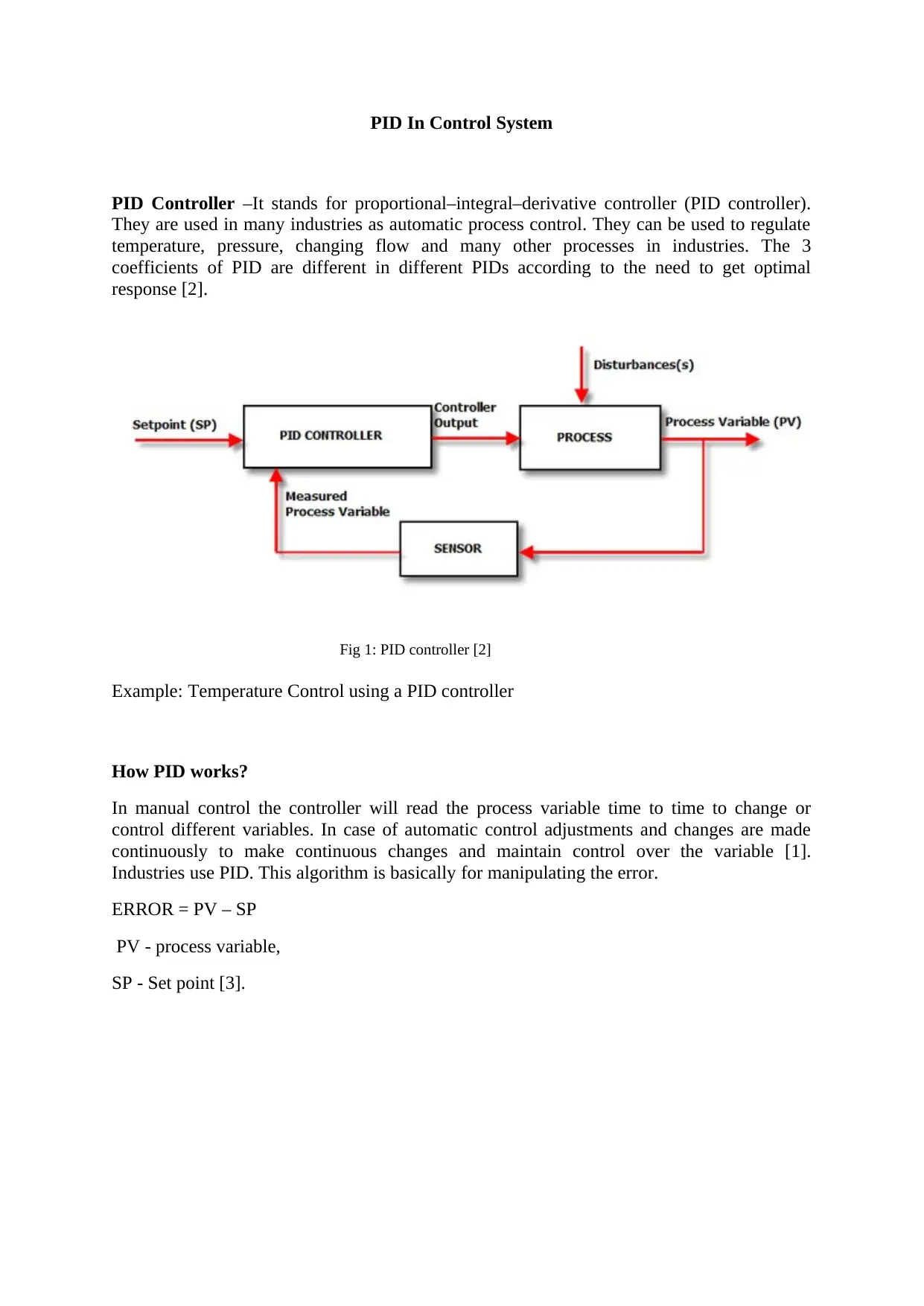
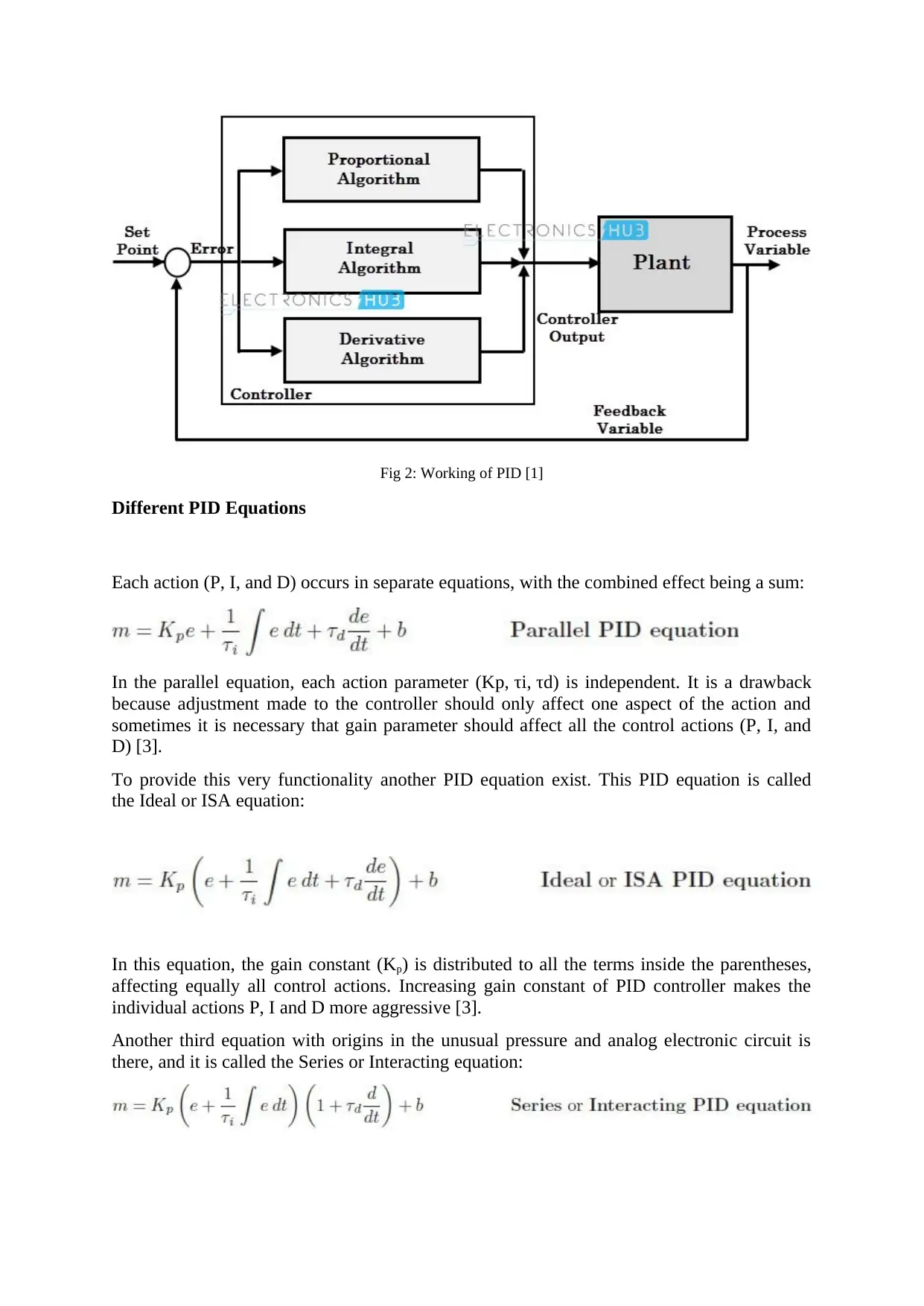
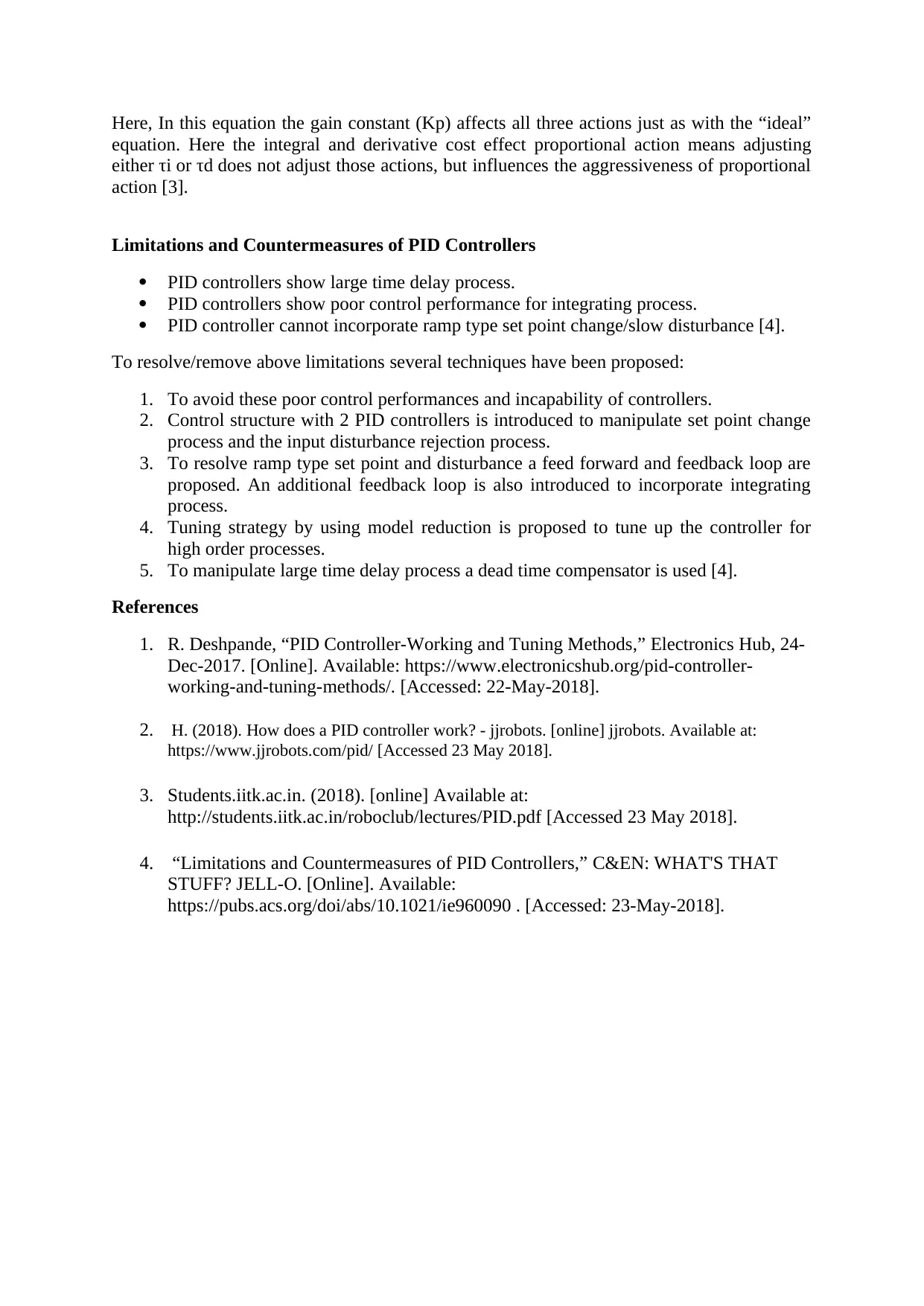
This report provides a detailed overview of Proportional-Integral-Derivative (PID) controllers, which are widely used in industrial automatic process control for regulating variables like temperature, pressure, and flow. It explains how PID controllers work by continuously adjusting variables based on the error between the process variable and the set point. The report discusses different PID equations, including the parallel, ideal (ISA), and series equations, highlighting their unique characteristics and applications. It also addresses the limitations of PID controllers, such as large time delays and poor performance with integrating processes, and presents several countermeasures, including the use of two PID controllers, feedforward and feedback loops, model reduction tuning strategies, and dead time compensators. The document concludes with a list of references used to compile the information.
1 out of 3
Related Documents





Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.