Competency Demonstration Report: PID Control for Pendulum Balancing
VerifiedAdded on 2021/05/31
|10
|1511
|19
Report
AI Summary
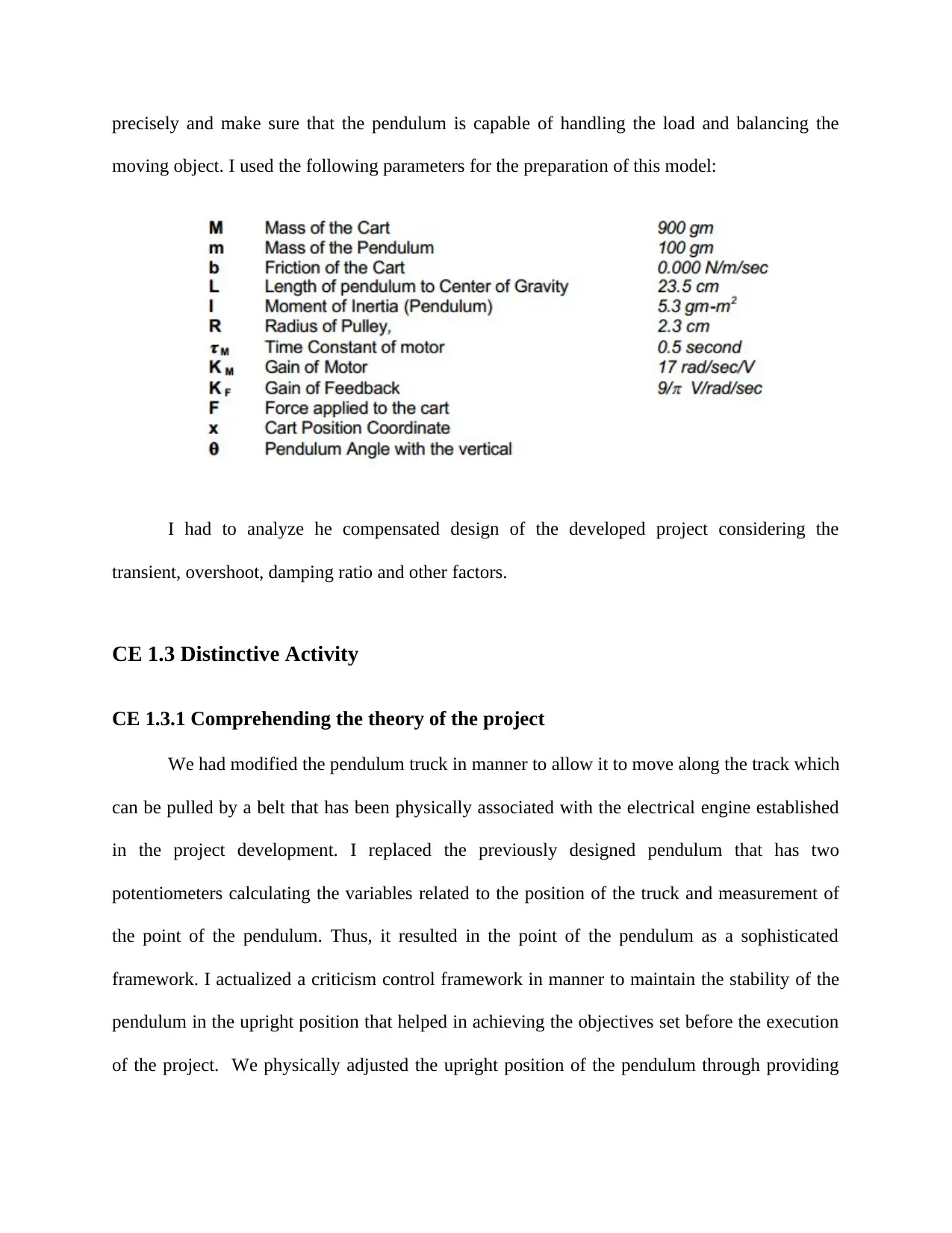
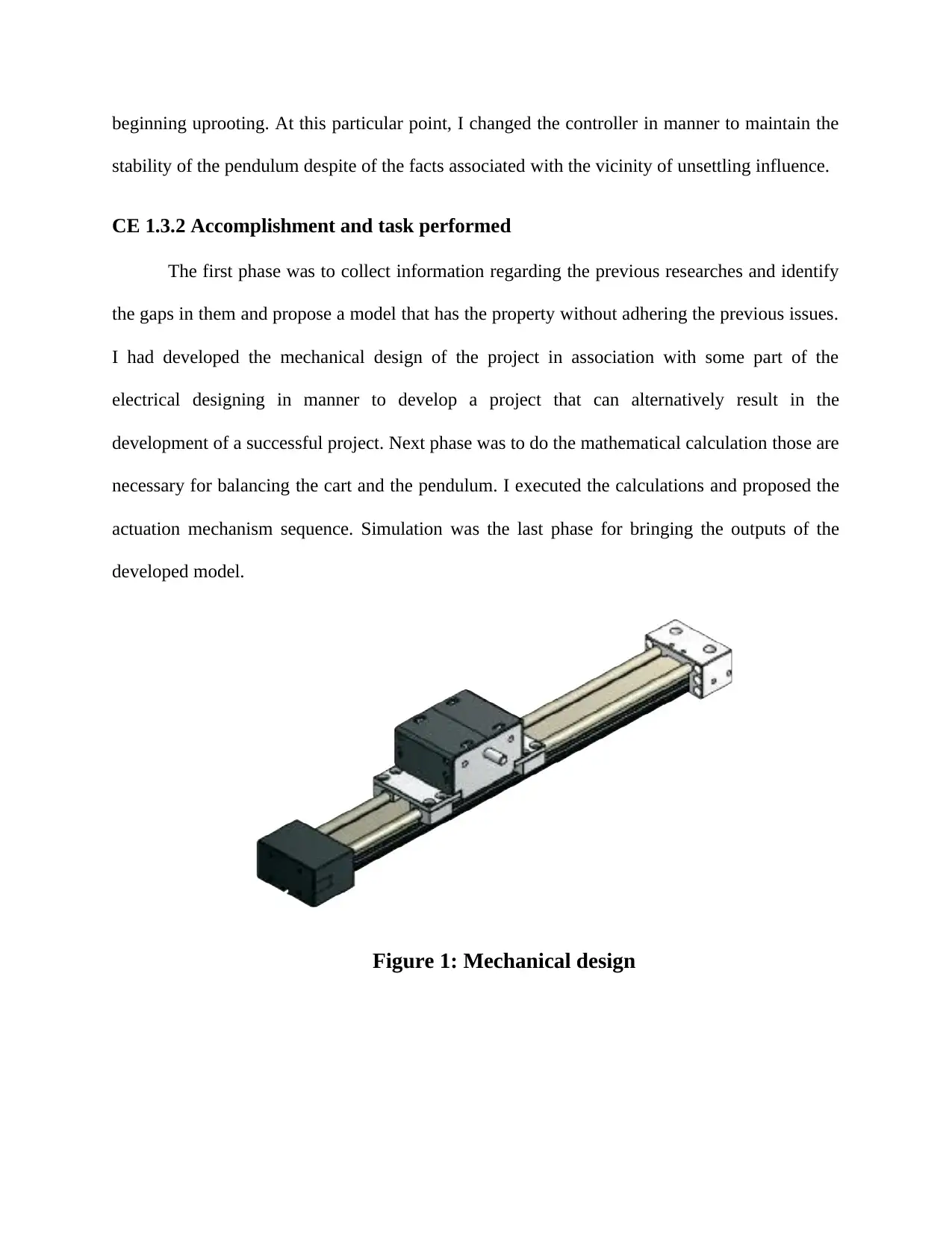
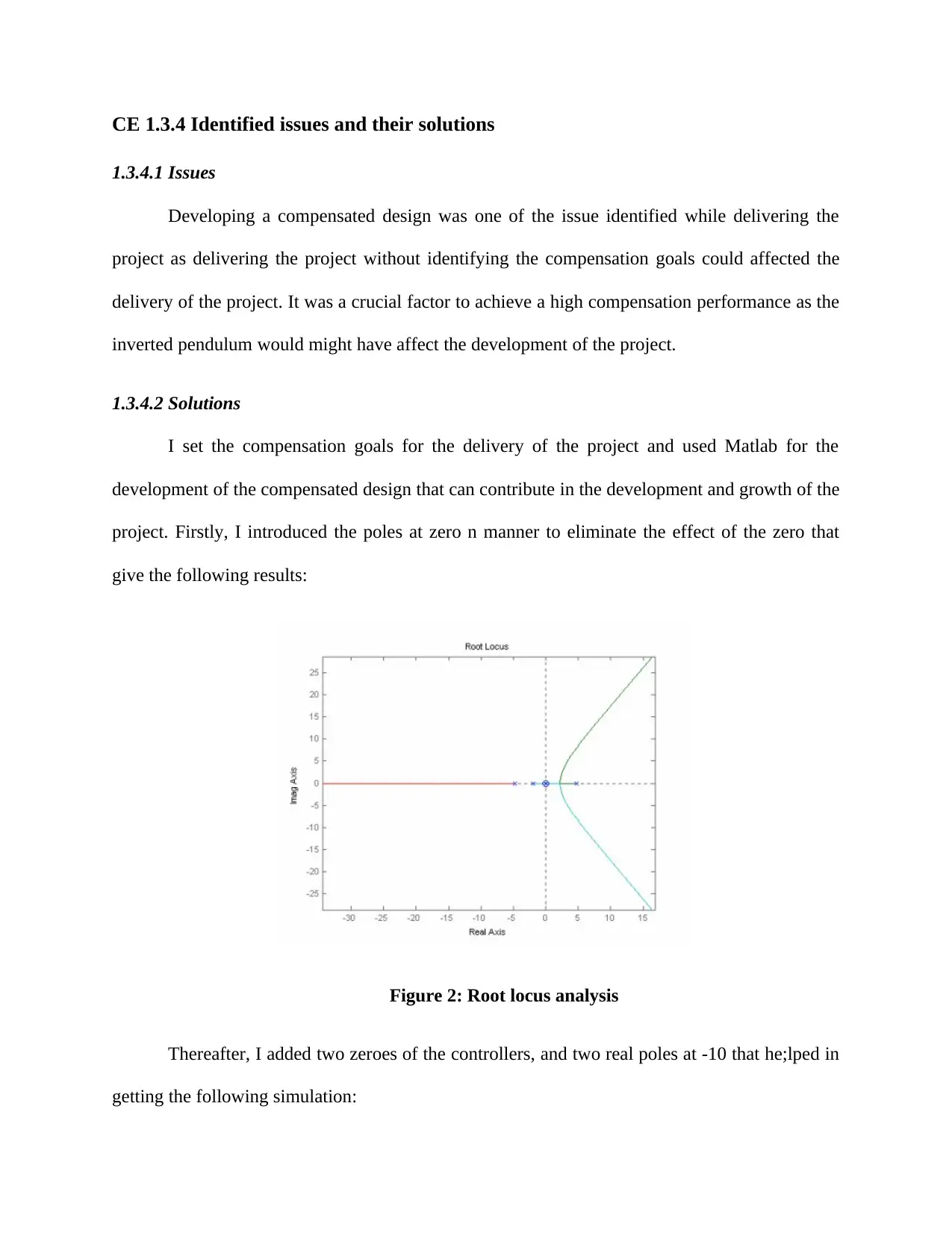
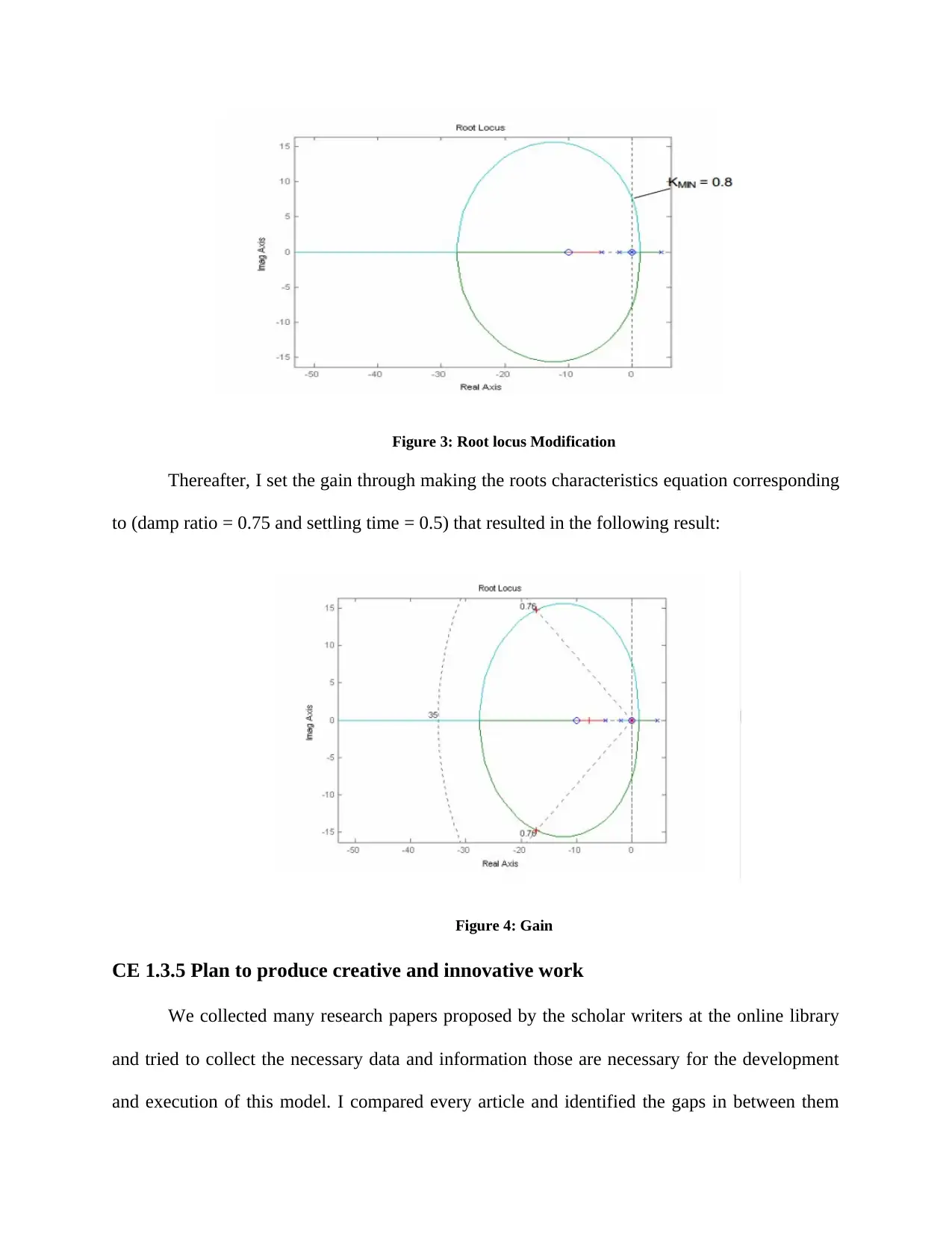
This competency demonstration report details a mechanical engineering project focused on using PID control theory to balance an inverted pendulum. The project, conducted at the International Islamic University Malaysia, involved designing and implementing a control system to maintain the pendulum in an upright position. The report covers the project background, objectives, the student's role in developing the mechanical design, and the mathematical calculations required for balancing the cart and pendulum system. It highlights the use of a DC motor, analog components, and a linear guide system. The report also addresses challenges such as developing a compensated design and the solutions implemented, including the use of Matlab for simulations and root locus analysis. The project emphasizes collaborative work and the application of PID control to achieve precise and efficient balance, demonstrating the student's understanding of control systems and mechanical engineering principles.
1 out of 10


Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.