Computer Controlled Systems: Assignment 2 - Position Control Design
VerifiedAdded on 2023/01/11
|11
|1567
|90
Homework Assignment
AI Summary
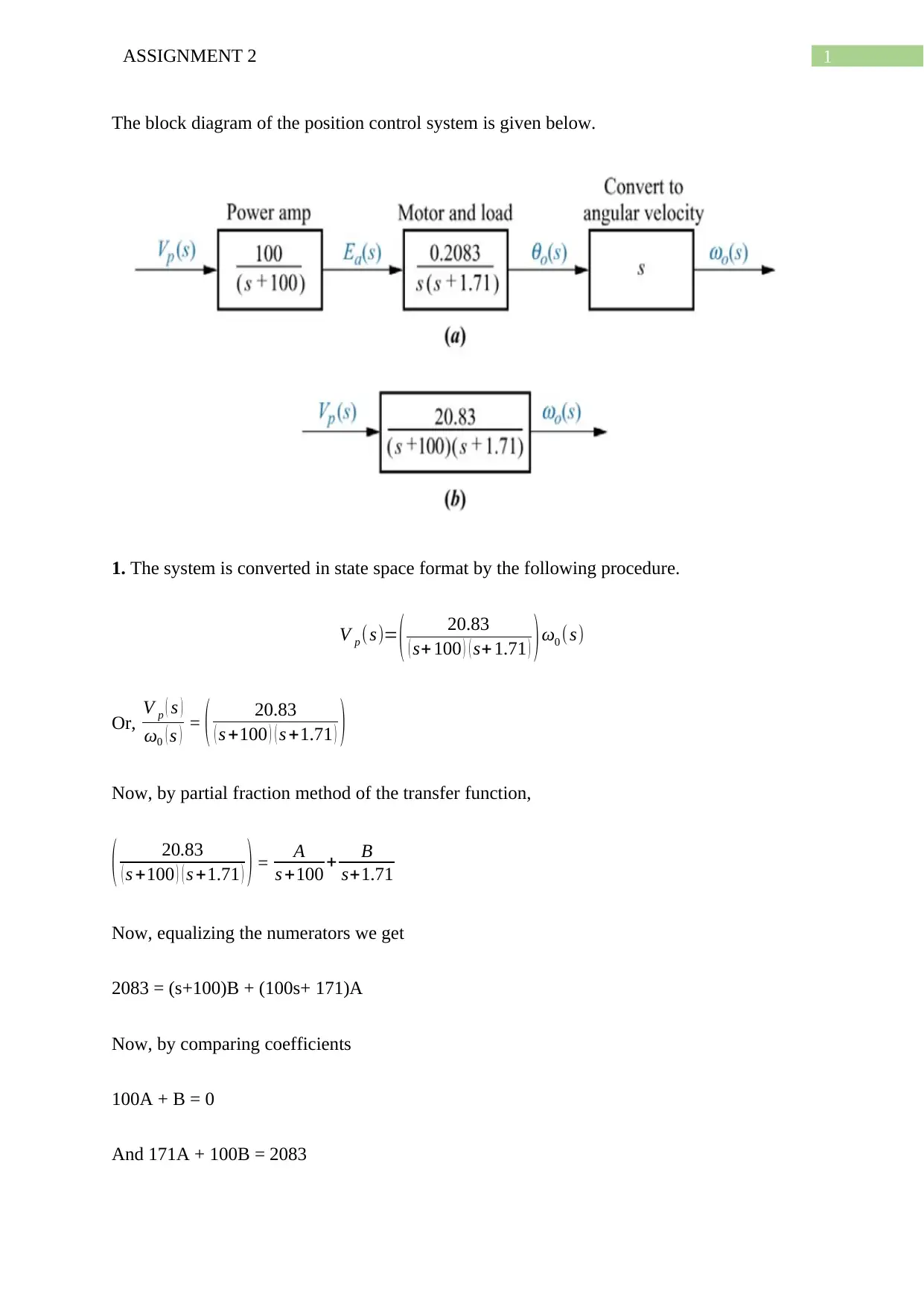
This assignment solution addresses the analysis and control design of a position control system. The solution begins by converting the system into a state-space format and simulating its response to a unit step input. It then discretizes the system and investigates the impact of different sampling times using MATLAB simulations. The core of the assignment involves designing a state variable feedback regulator to achieve desired performance characteristics, specifically placing complex poles at specified locations. The closed-loop system's response is then simulated and compared to the original system. The solution also explores the design of a dead-beat observer to provide state variables when direct measurements are unavailable, simulating the complete system with the regulator and observer in place.

1 out of 11
Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.