Nonlinear Programming Approach to Step-Cone Pulley Optimization
VerifiedAdded on 2023/06/12
|3
|920
|274
Project
AI Summary
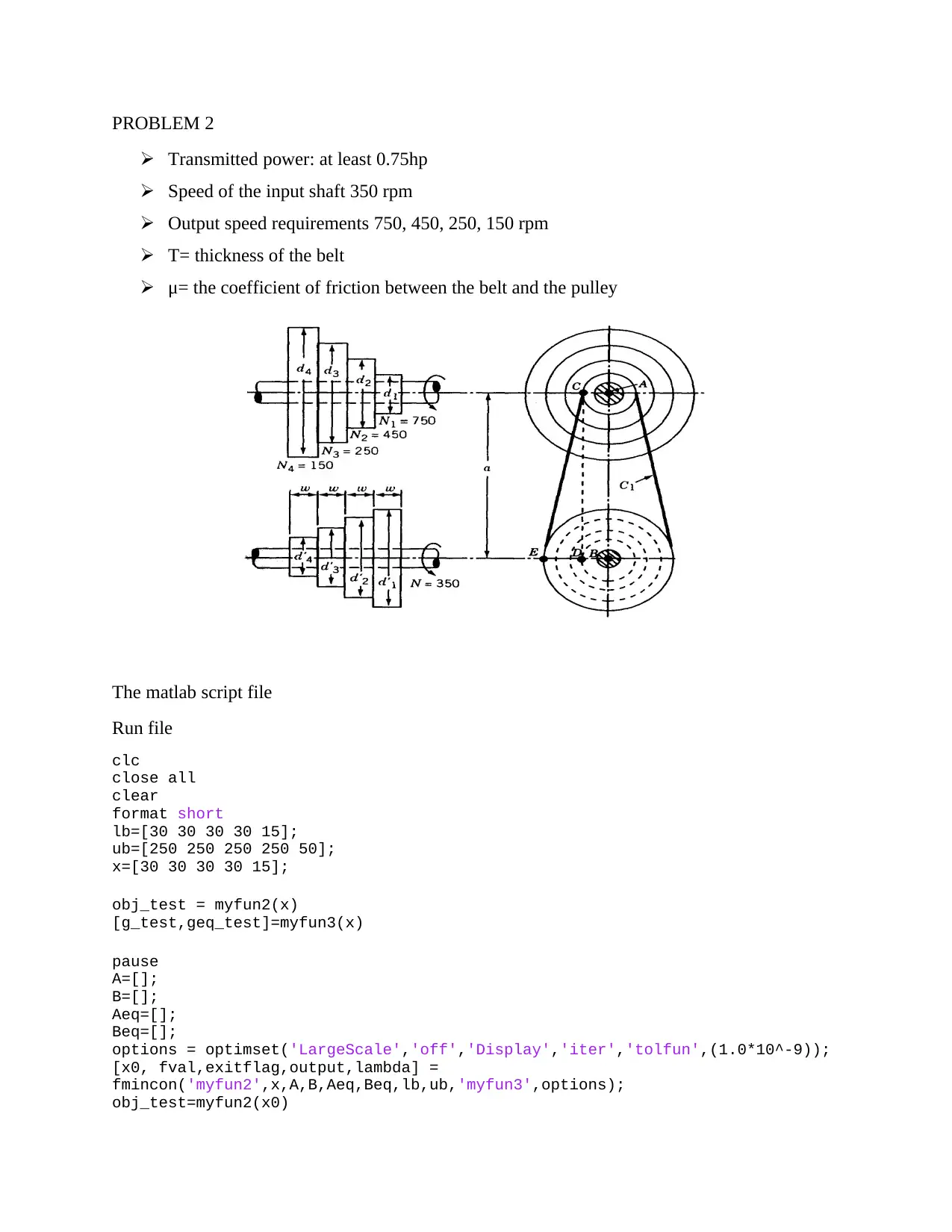
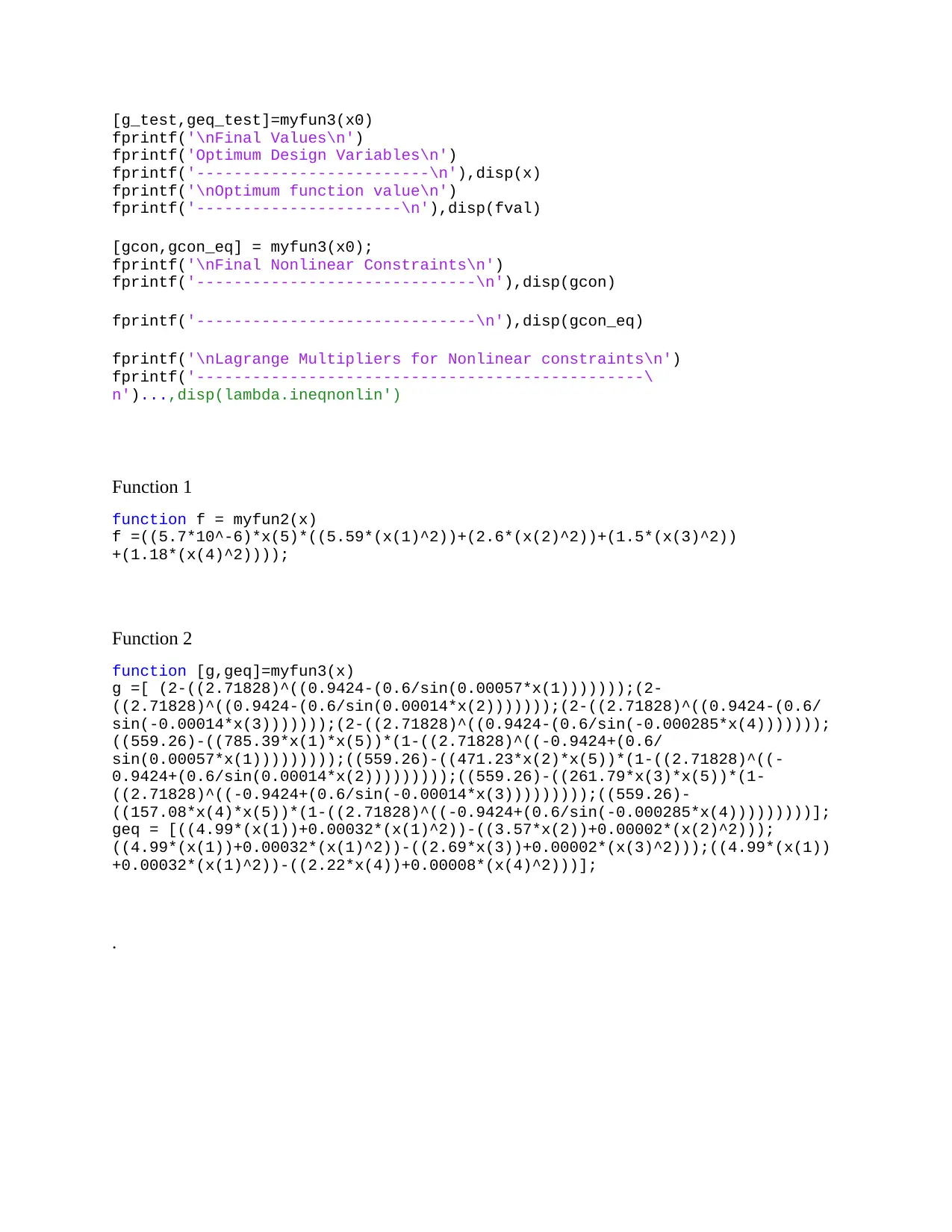
This project focuses on the design optimization of a step-cone pulley using nonlinear programming techniques. The goal is to minimize the weight of the pulley while meeting specific power transmission and speed requirements. The problem is formulated with constraints related to belt tension, output speeds, and other design parameters. The solution involves using MATLAB to implement optimization algorithms, defining objective functions and constraints, and iteratively refining the design variables to achieve an optimal solution. The project report includes detailed design information, discusses the effects of design variables on the pulley's weight, and compares the results obtained from different optimization approaches. This document provides a comprehensive approach to solving a practical engineering problem through numerical optimization, with the aim of creating an efficient and lightweight step-cone pulley system. Desklib provides access to similar solved assignments and past papers for students.
1 out of 3
Related Documents





Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.