PWM Technique for D.C Motor Speed Control: Design and Implementation
VerifiedAdded on 2023/03/31
|15
|2246
|372
Report
AI Summary
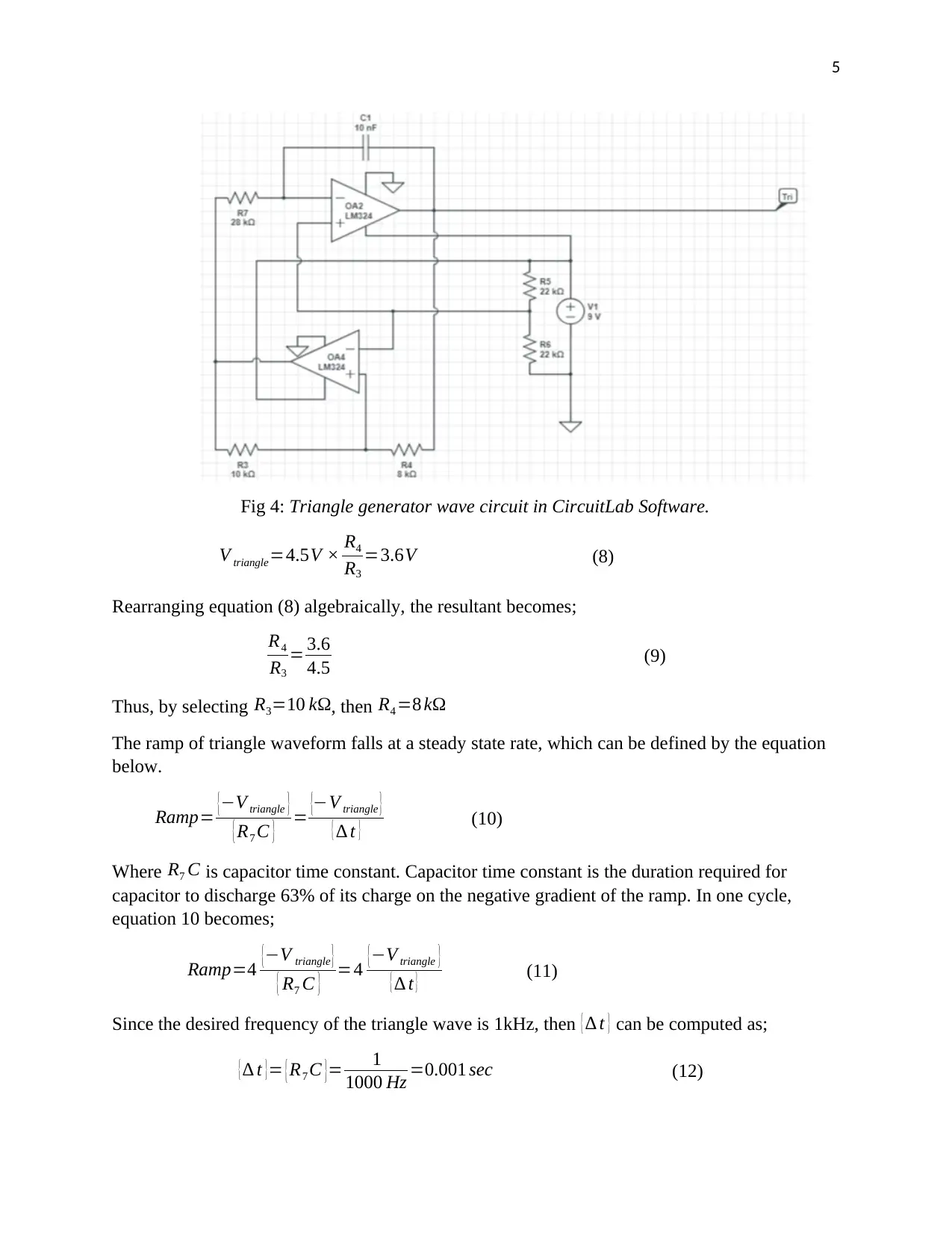
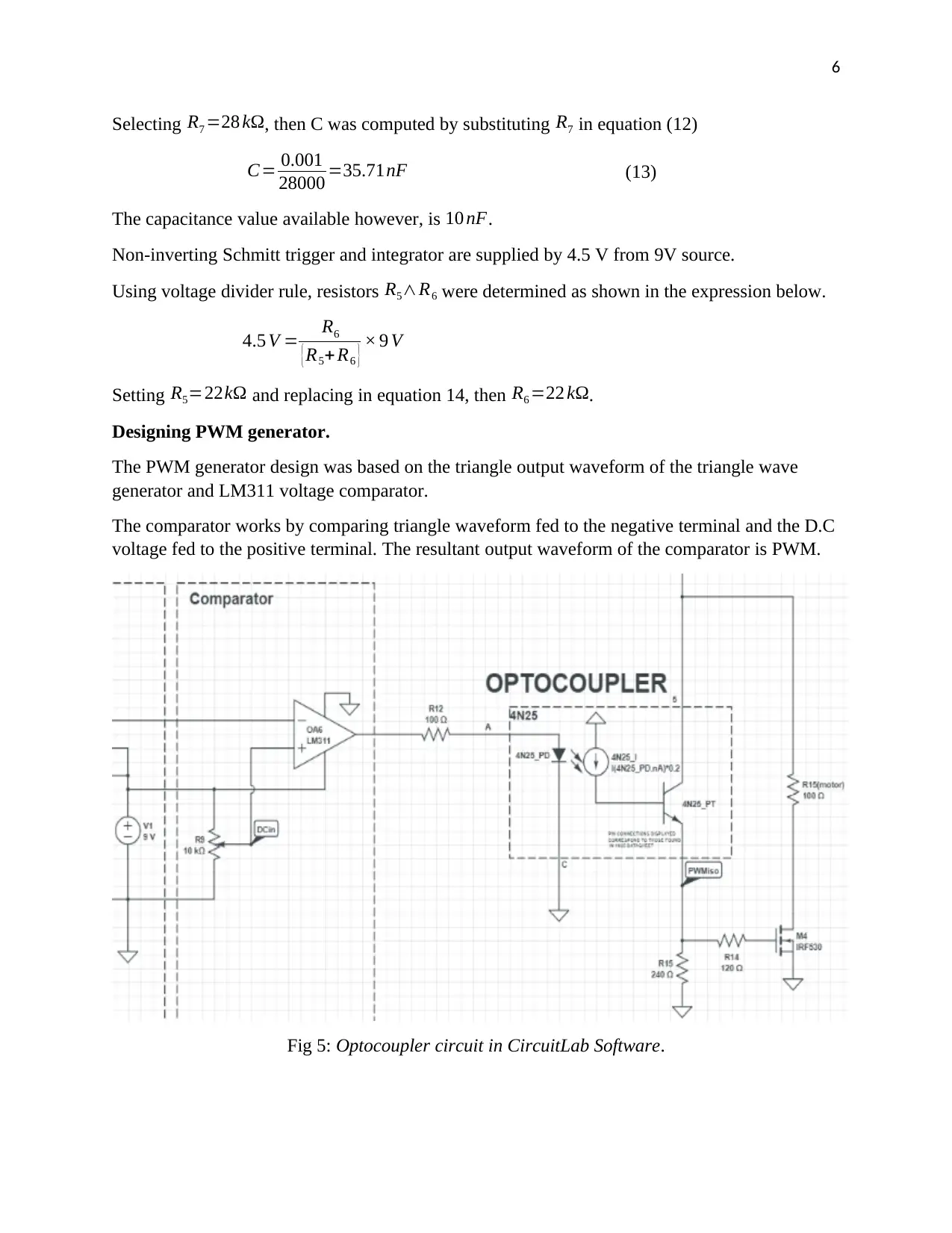
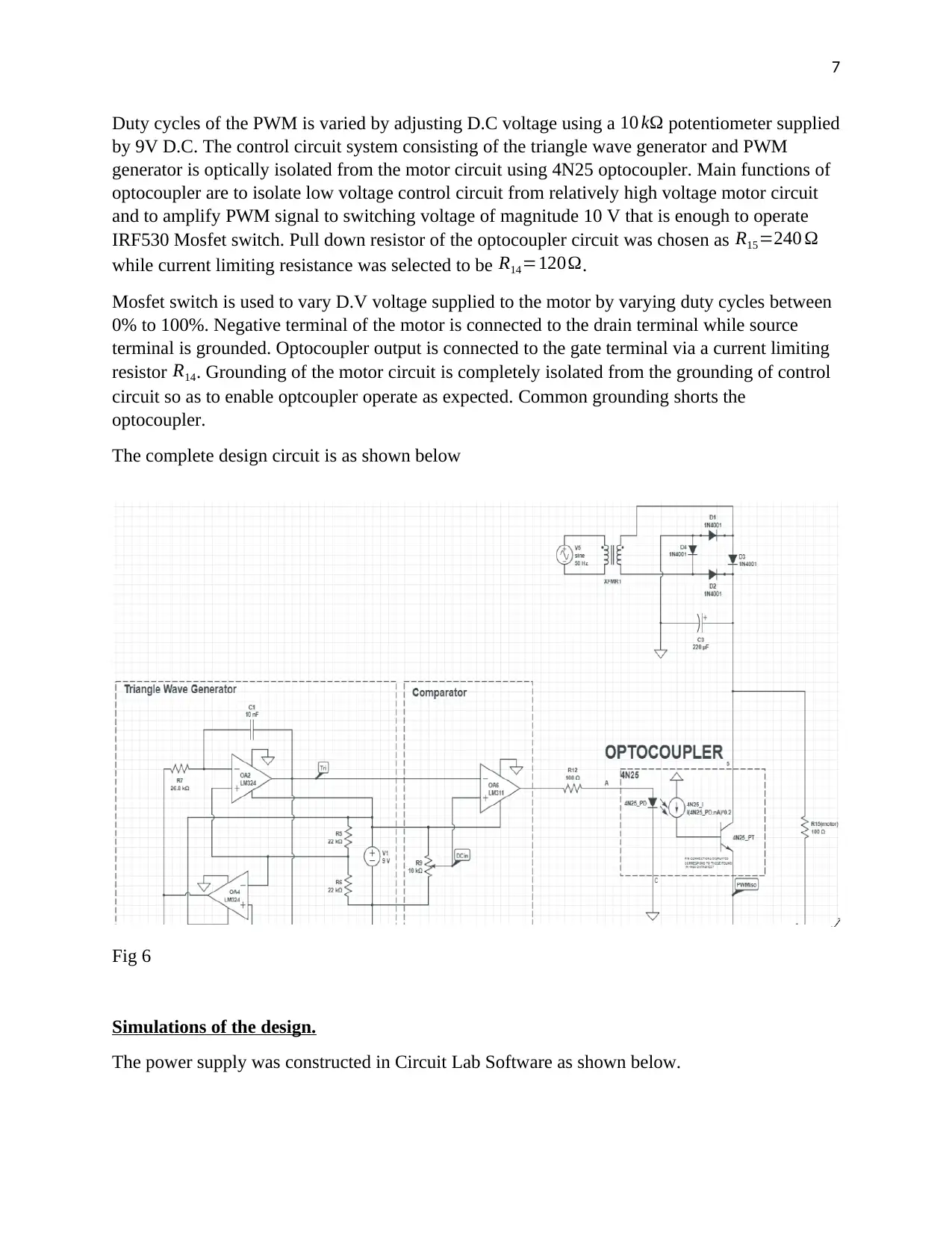
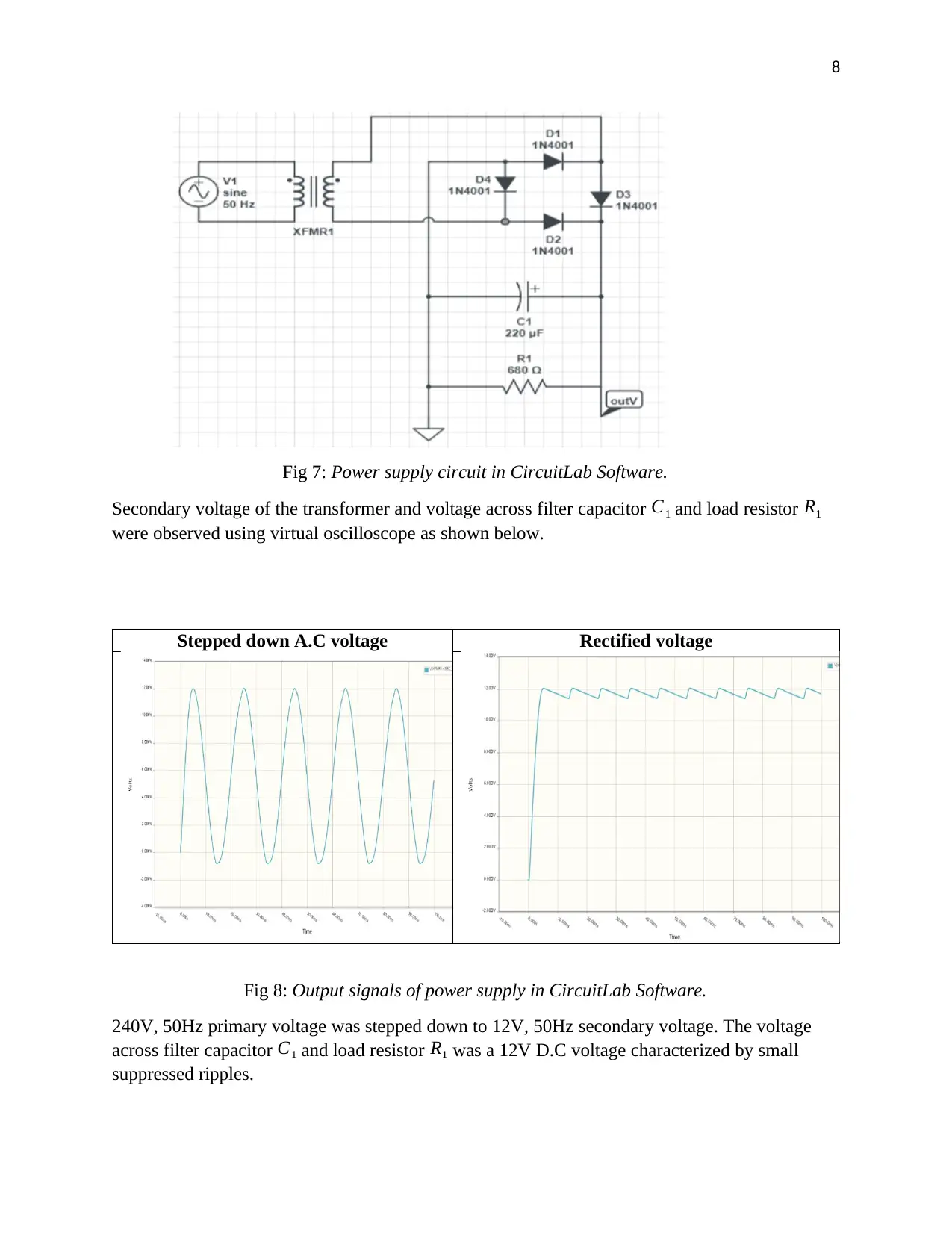
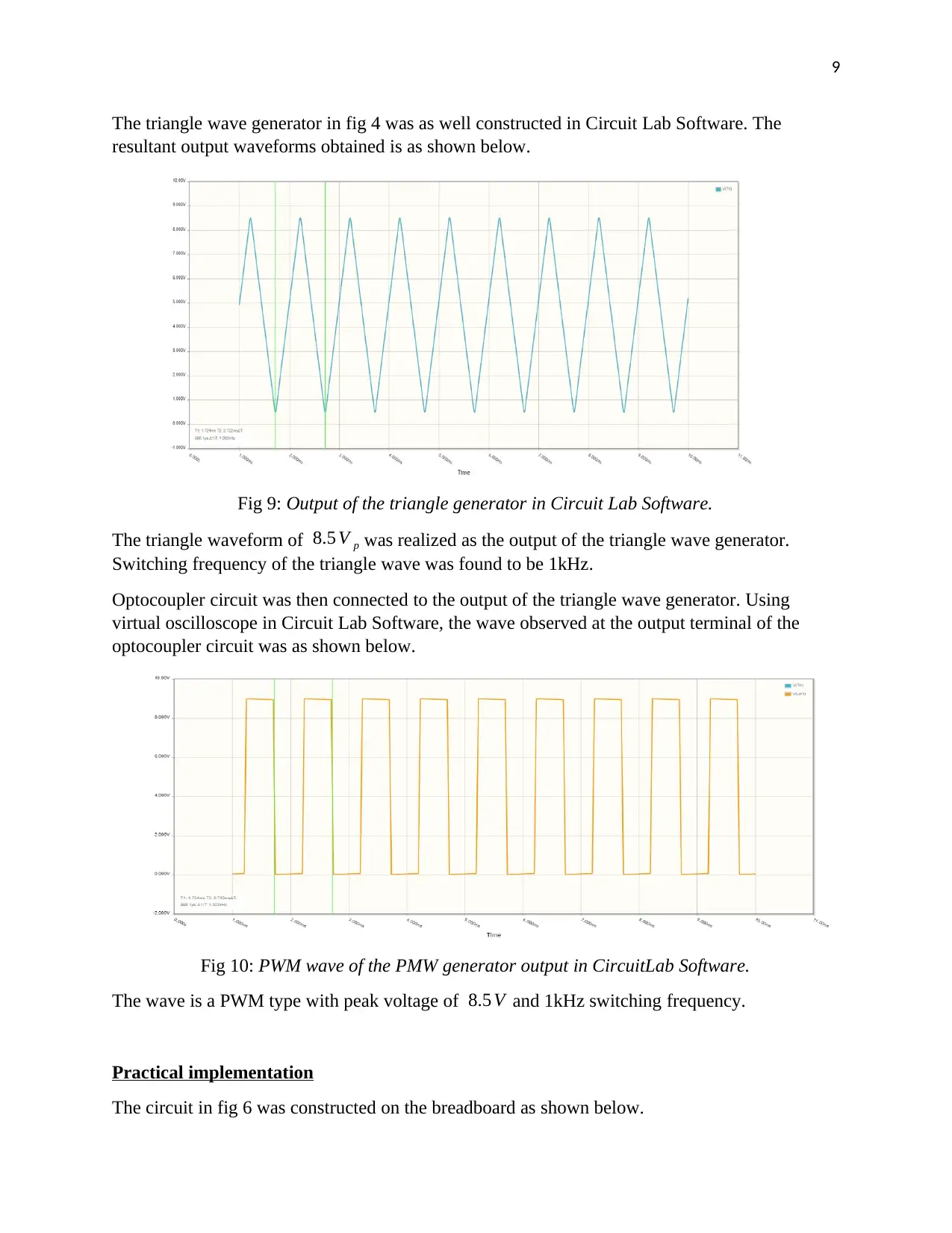
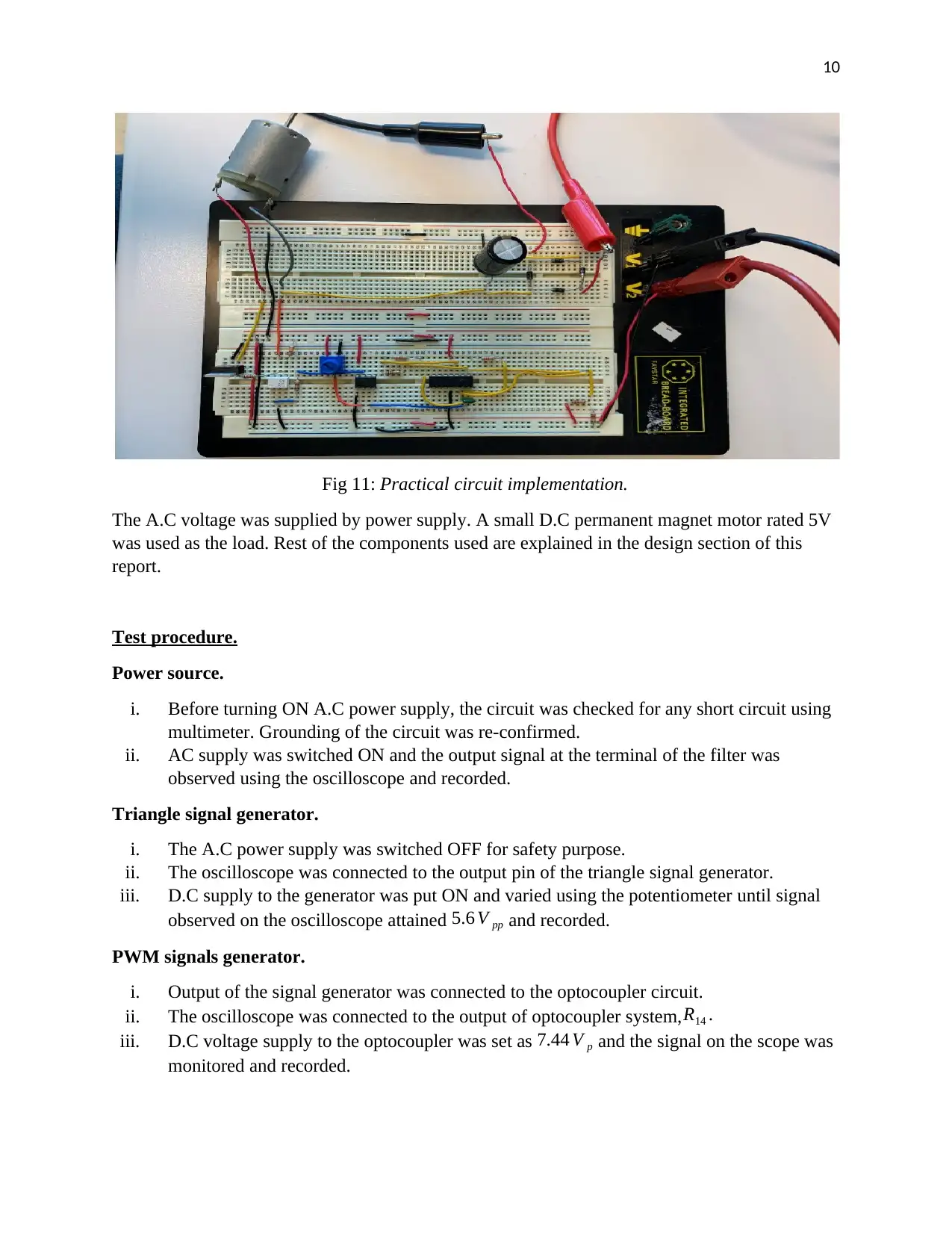
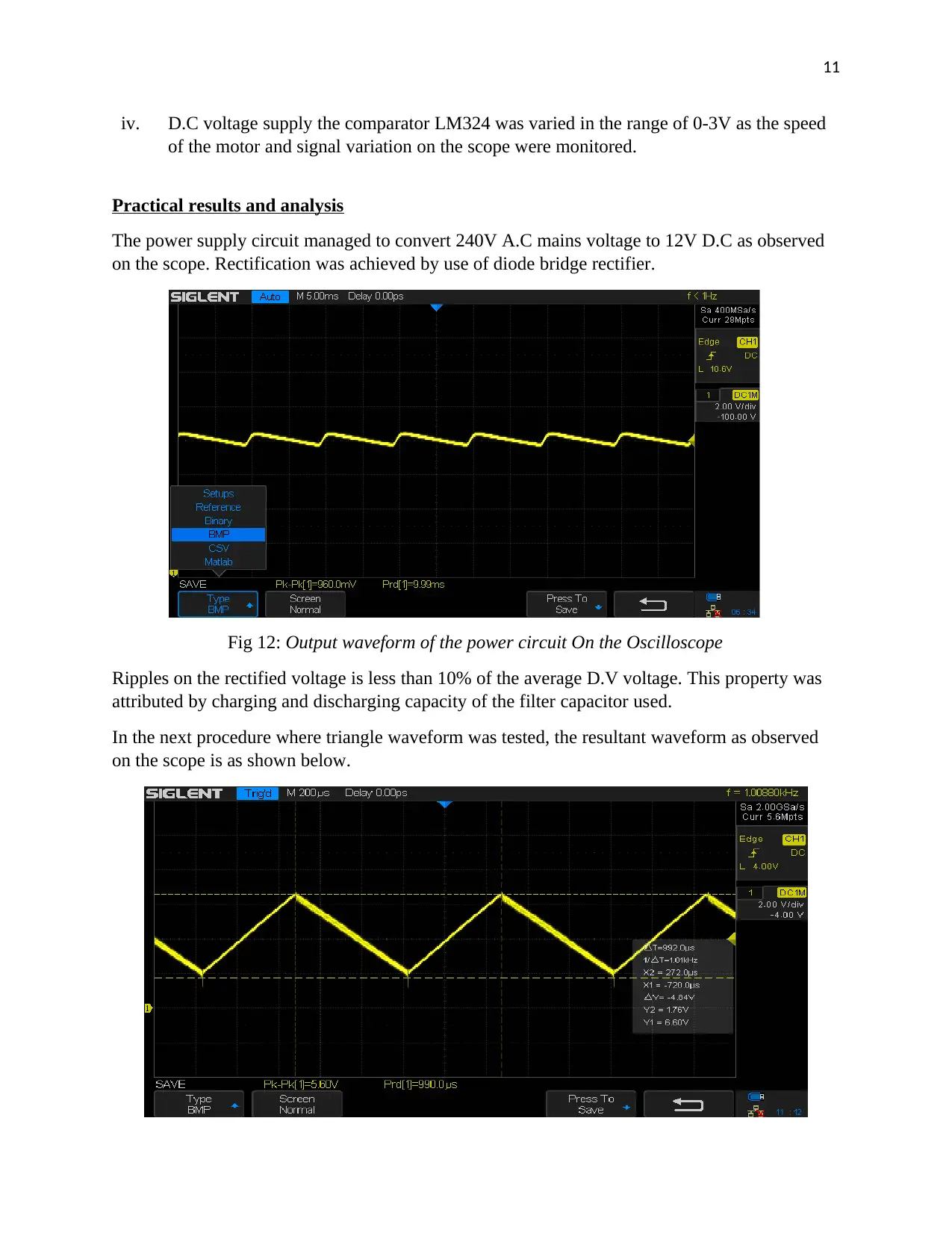
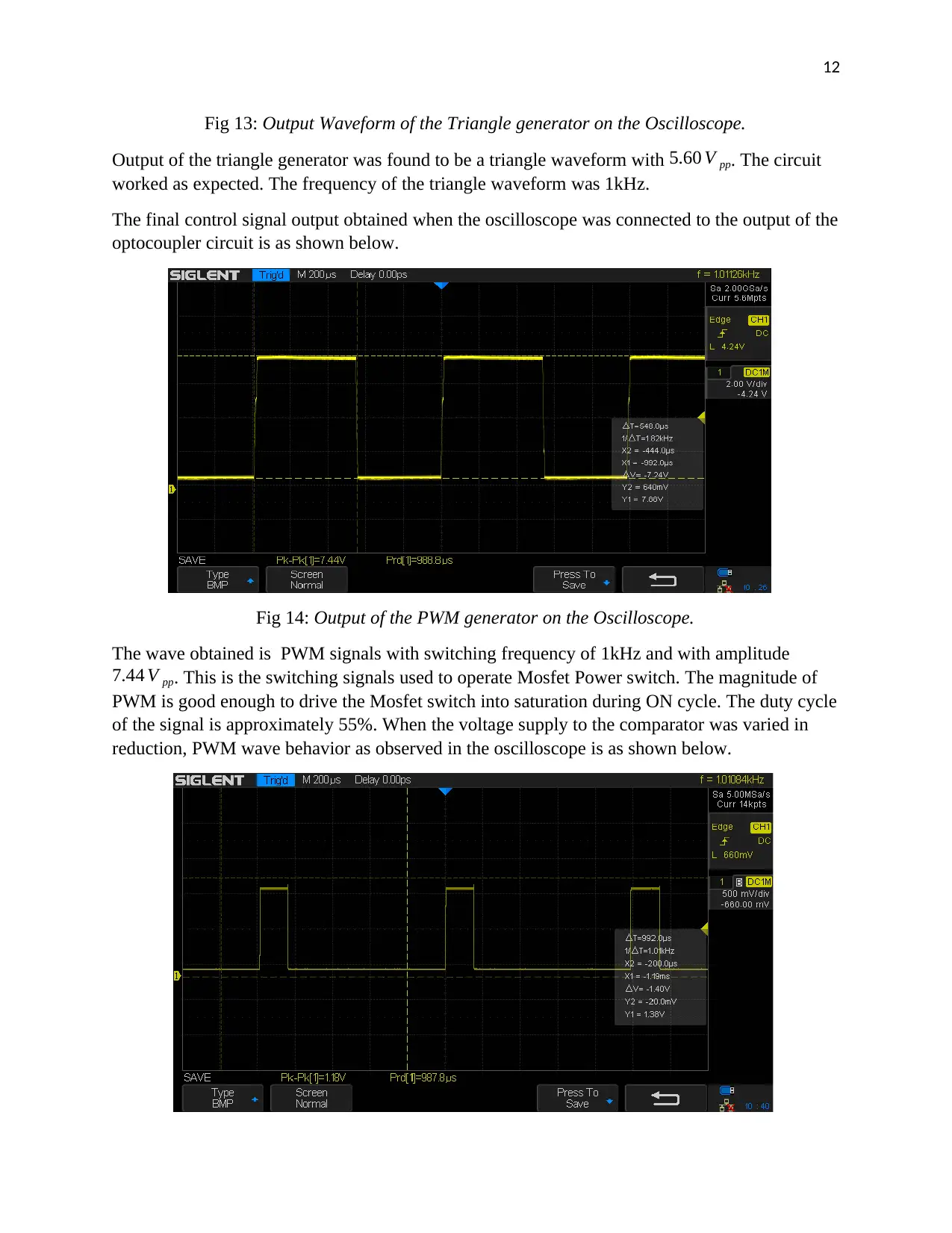
This report presents the design and implementation of a D.C motor speed control system using Pulse Width Modulation (PWM). The system converts AC power to DC, steps down the voltage, rectifies and filters it, and then uses a PWM signal to control the D.C motor's speed. The design includes a power supply converting 240V AC to a lower D.C voltage, a 1kHz triangle wave generator using an LM324 chip, and a PWM generator based on an LM311 voltage comparator. The control circuit is optically isolated from the motor circuit using an optocoupler. Simulations are performed using Circuit Lab Software to verify the design, and practical implementation is carried out on a breadboard with a small D.C permanent magnet motor. Test procedures and results are documented, showing the successful conversion of A.C to D.C, the generation of triangle waveforms, and the creation of PWM signals with varying duty cycles to control the motor speed.
1 out of 15
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.