Project: Application of Mechanical Control for Quad Bike Drive-Line
VerifiedAdded on 2023/06/08
|20
|1928
|280
Project
AI Summary
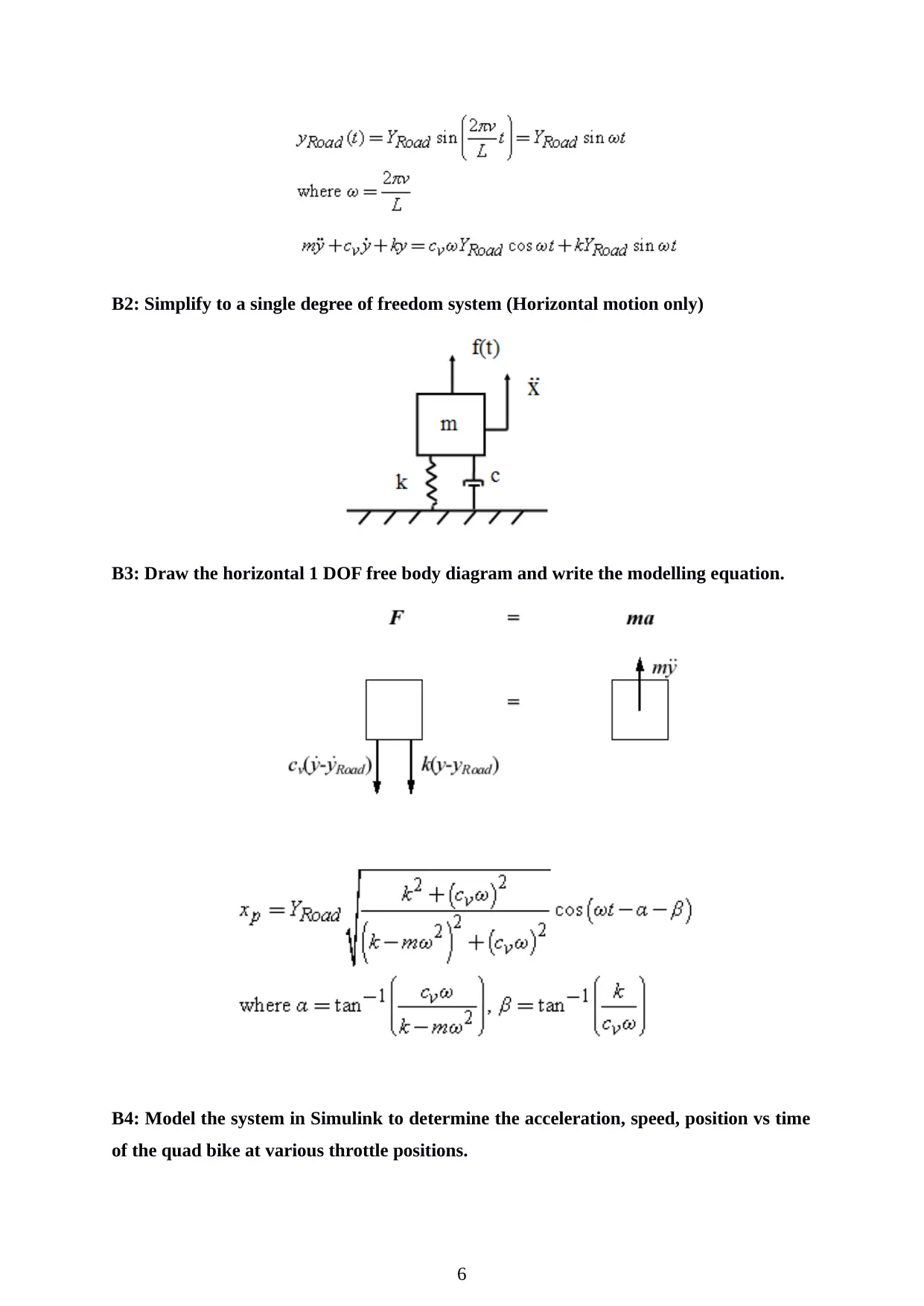
This project focuses on designing and analyzing a drive-line control system for a quad bike to improve performance and reduce mishaps, particularly focusing on wheel stand control. The project begins with problem investigation, scope definition, and assumptions, followed by the development of horizontal speed and position models. A two-degree-of-freedom model incorporating vertical and pitch dynamics is then developed, including a PID controller for wheel stand control. The project progresses to incorporate engine power and torque limitations, road surface variations, and payload changes. Further improvements involve re-assessing spring and damper values and analyzing the stability of the final model using root locus plots. The findings include how a controller stabilizes the system in the presence of noise. The project concludes with discussions on the benefits of the controller, design recommendations for suspension and controller parameters, and steps for implementing the controller on a real quad bike. The project also explores the benefits of using a PID controller to ensure optimum control dynamics to obtain zero steady state error, faster response which implies a shorter rise time, no oscillations, no overshoots, and higher stability.


1 out of 20
Related Documents





Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.