Safe-Driving Practice Simulation Project with Java Implementation
VerifiedAdded on 2023/06/15
|14
|973
|476
Project
AI Summary
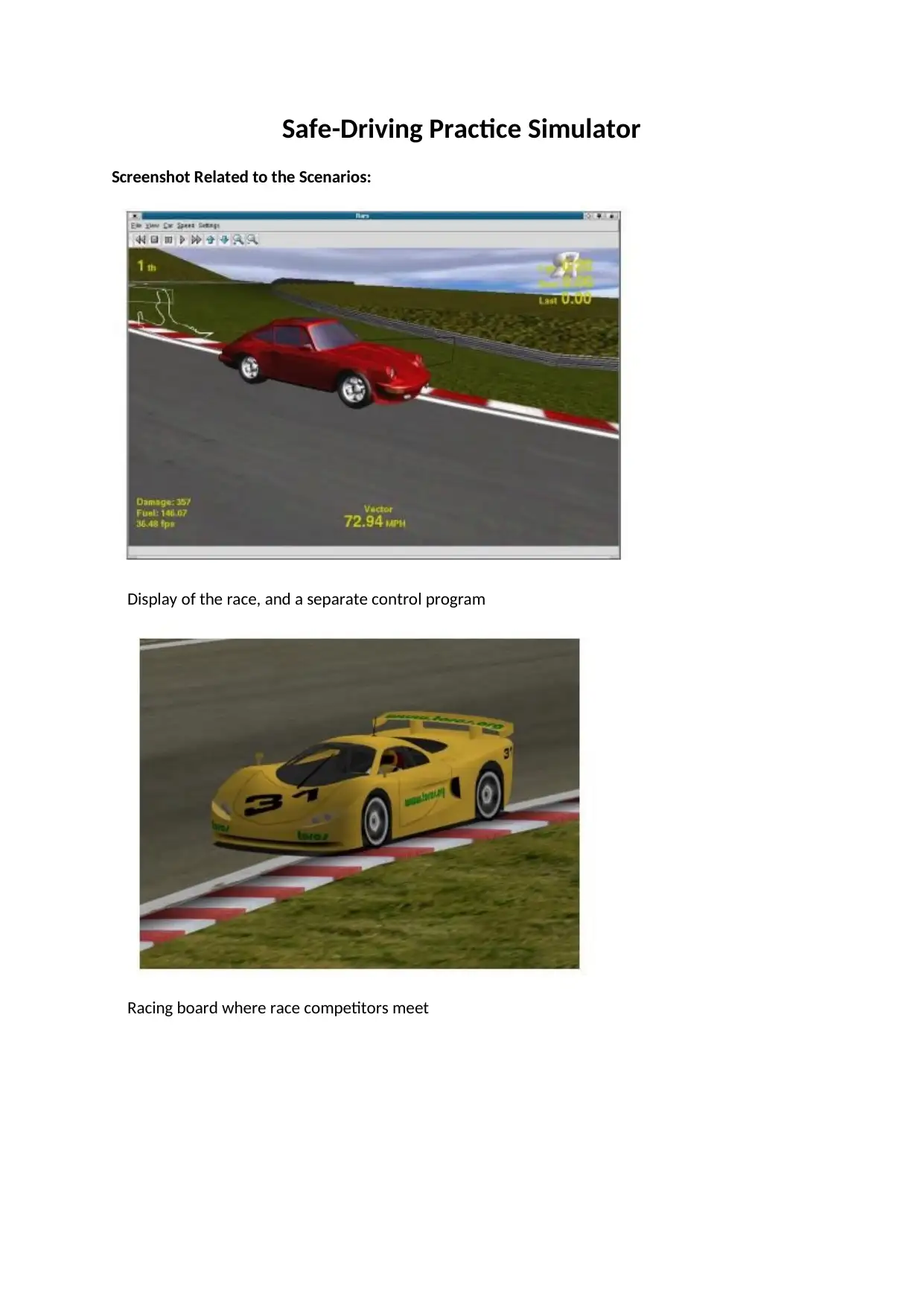
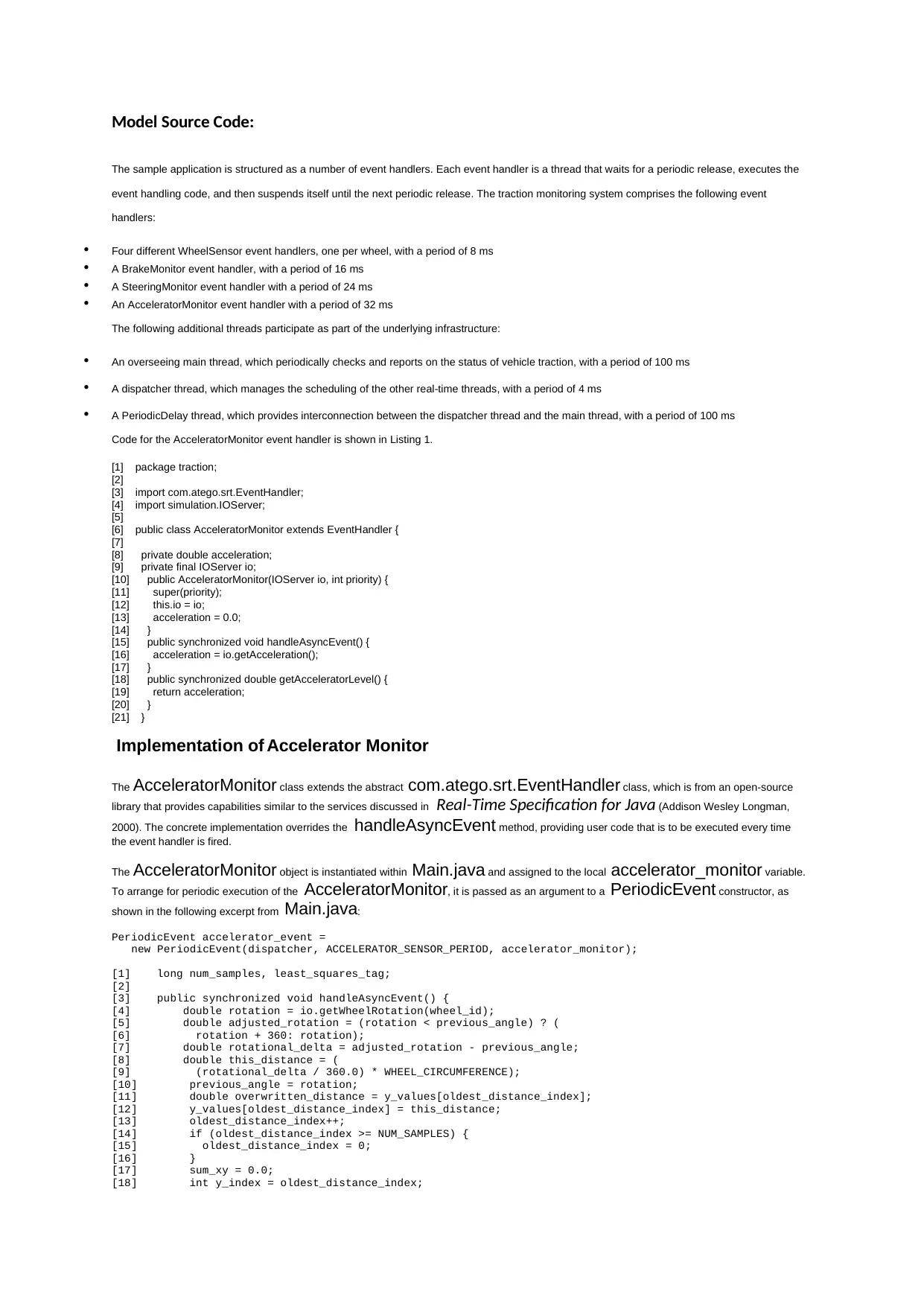
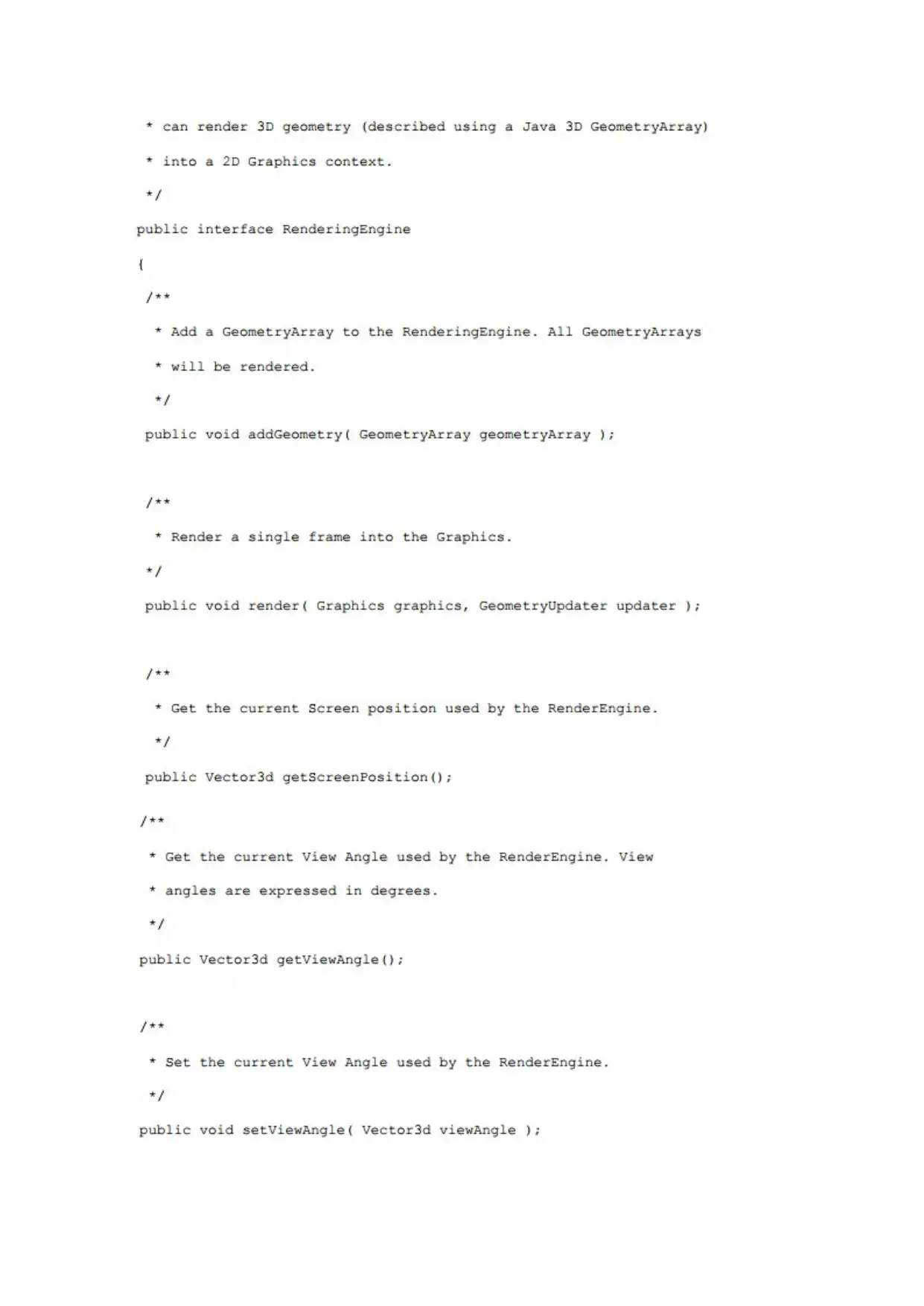
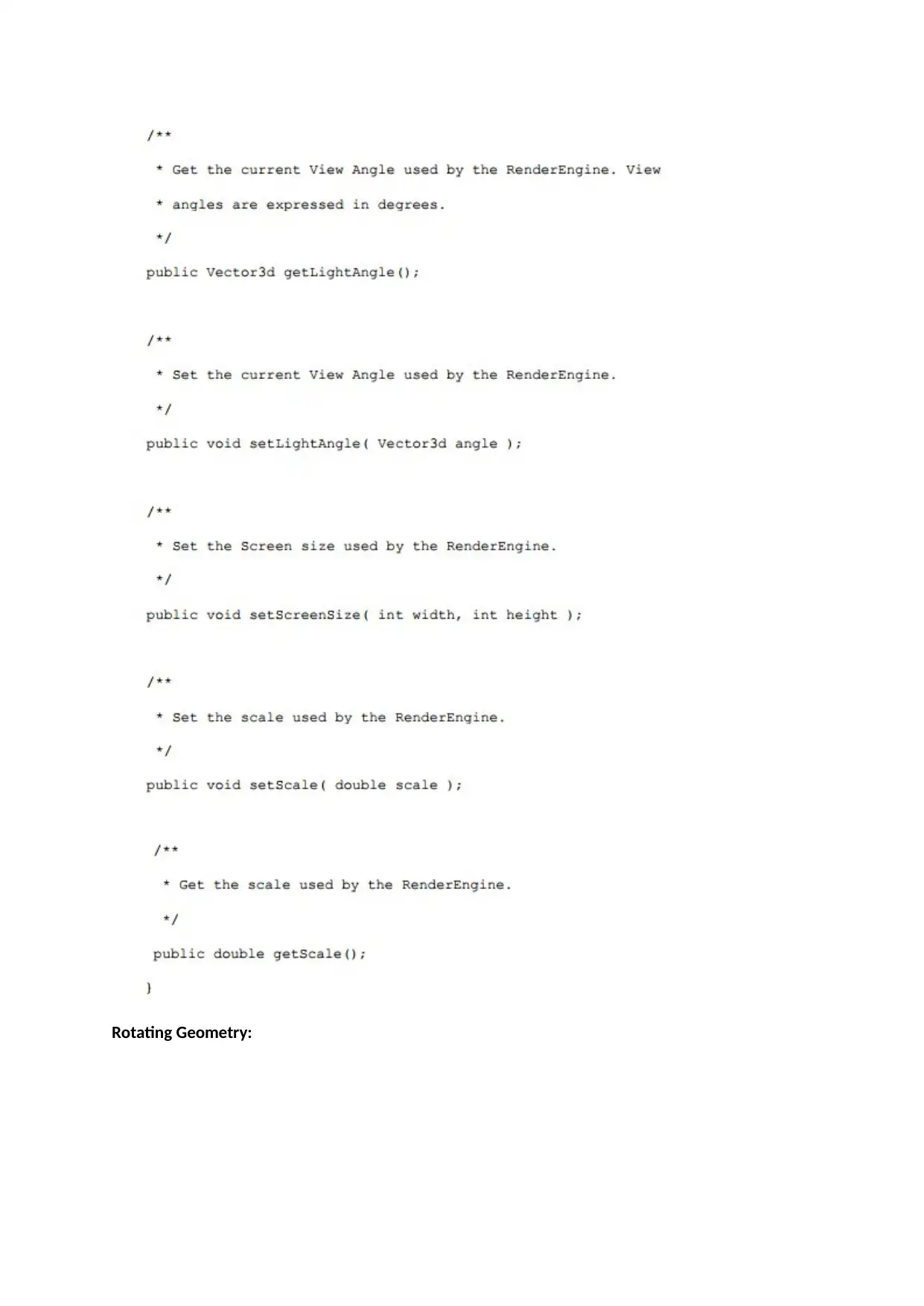
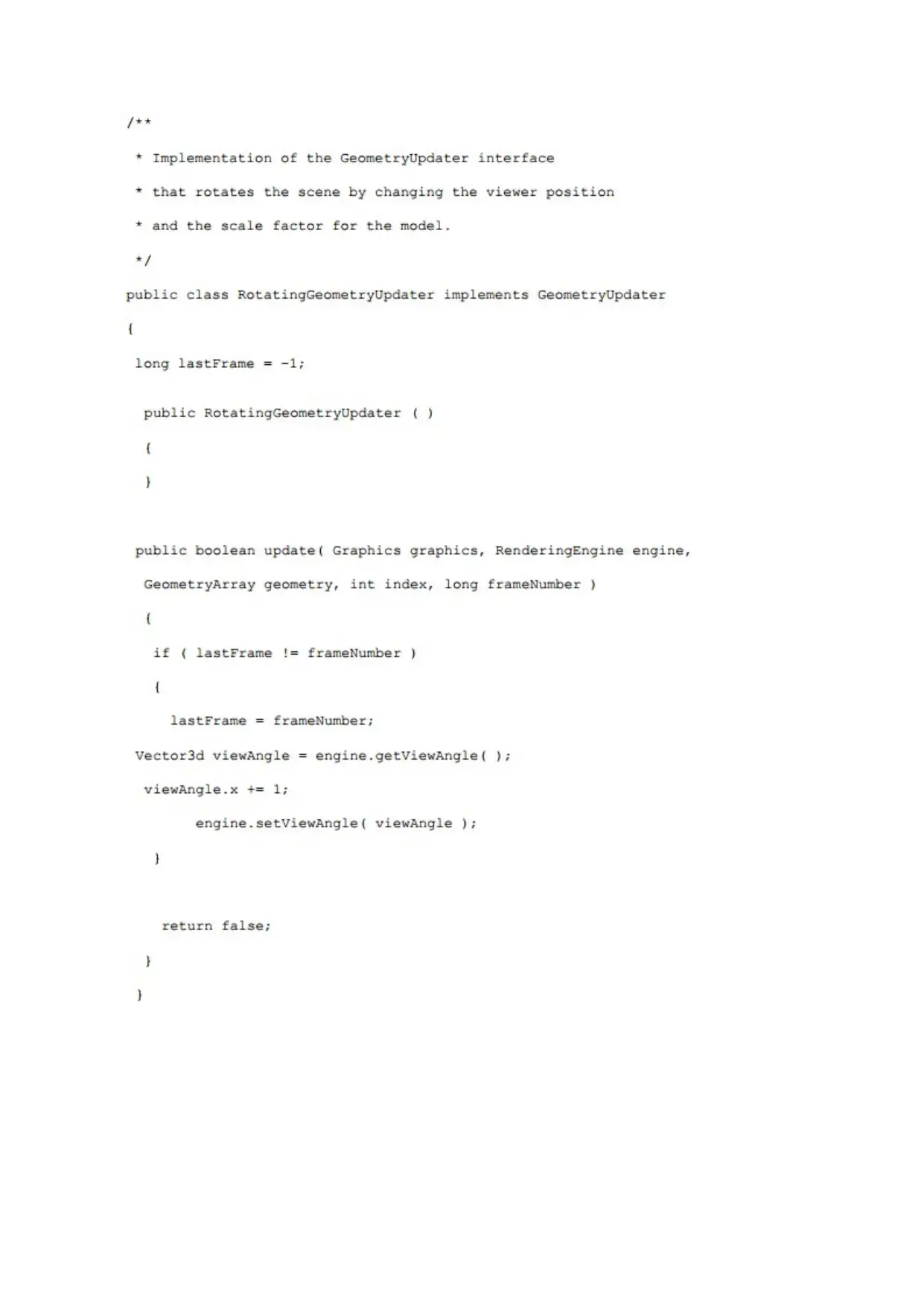
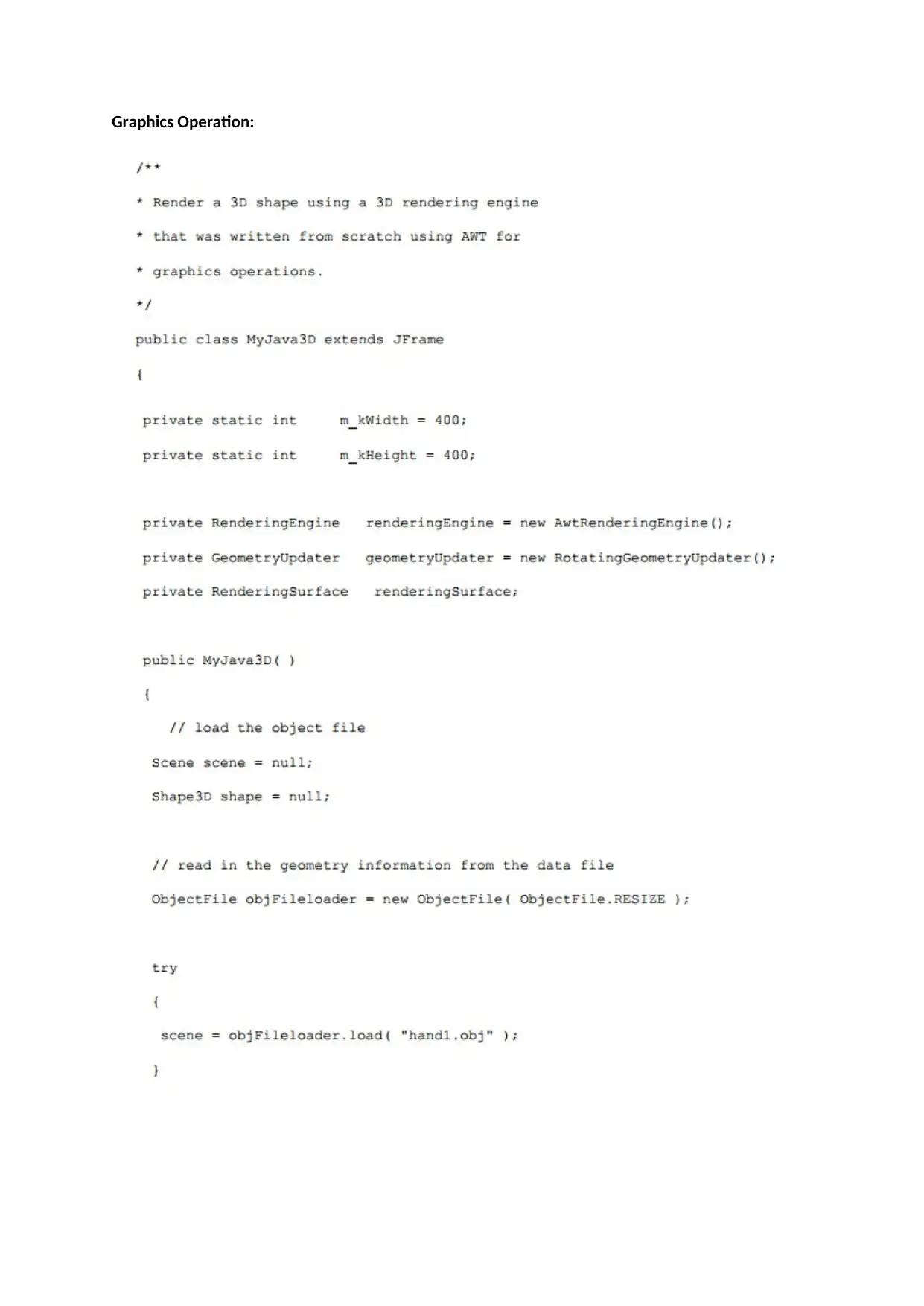
This Java project simulates a safe-driving practice test program designed to enhance user awareness of road safety. The application incorporates a user agreement component for terms and conditions, along with options for background color customization. The core scenario involves simulating three moving cars during a school hour, where each driver must adhere to a speed limit of 40 kmph, with braking attempts monitored. The project leverages Java Swing/JavaFx for user interface elements, Graphics 2D (and potentially Java3D) for visual representation, and includes the use of threads for managing real-time aspects of the simulation. The design emphasizes computational efficiency and memory management to ensure a high-quality solution, with comprehensive documentation provided.
1 out of 14
Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.