Satellite Dynamics: Principal MOI, Inertia Matrix Analysis & Rotation
VerifiedAdded on 2023/05/28
|9
|1320
|171
Homework Assignment
AI Summary
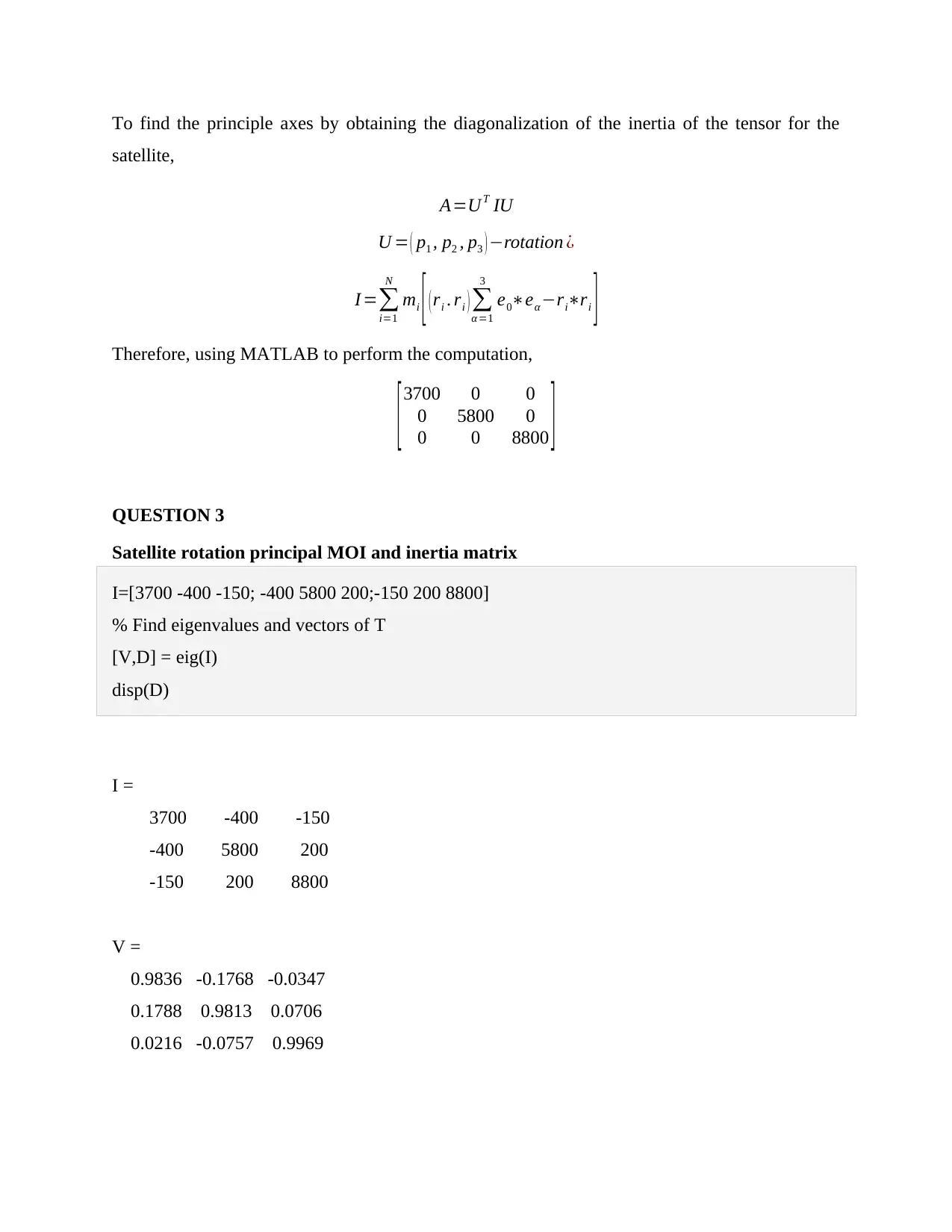
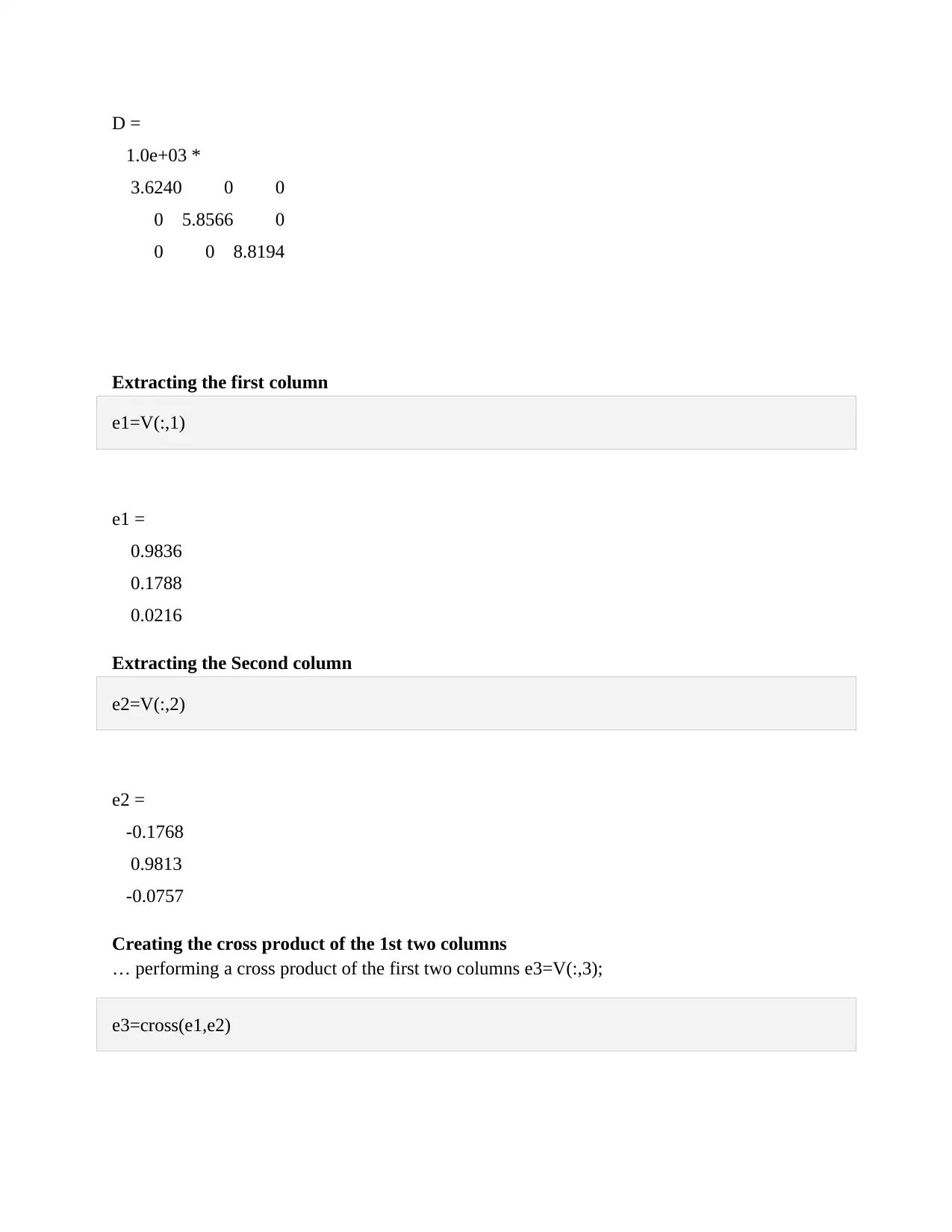
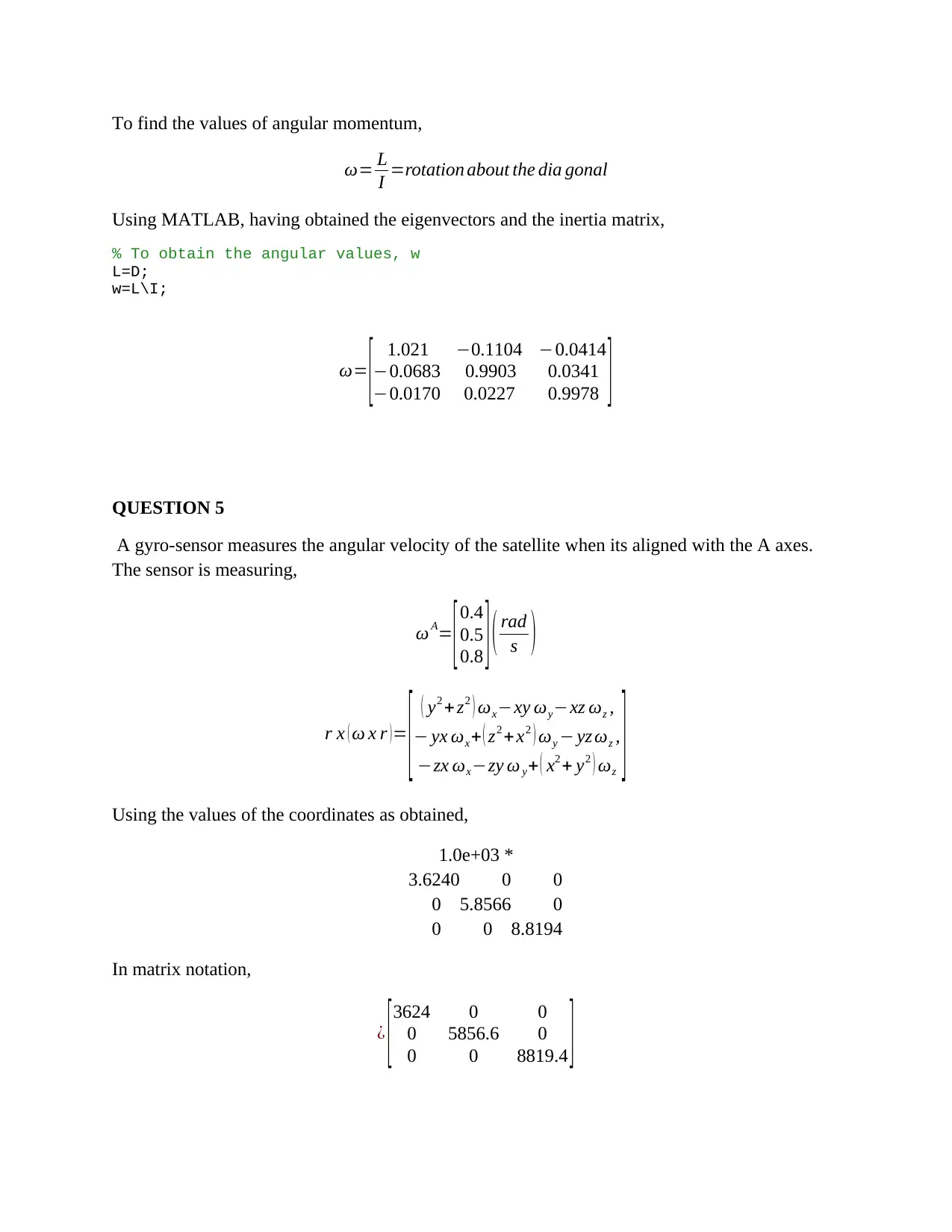
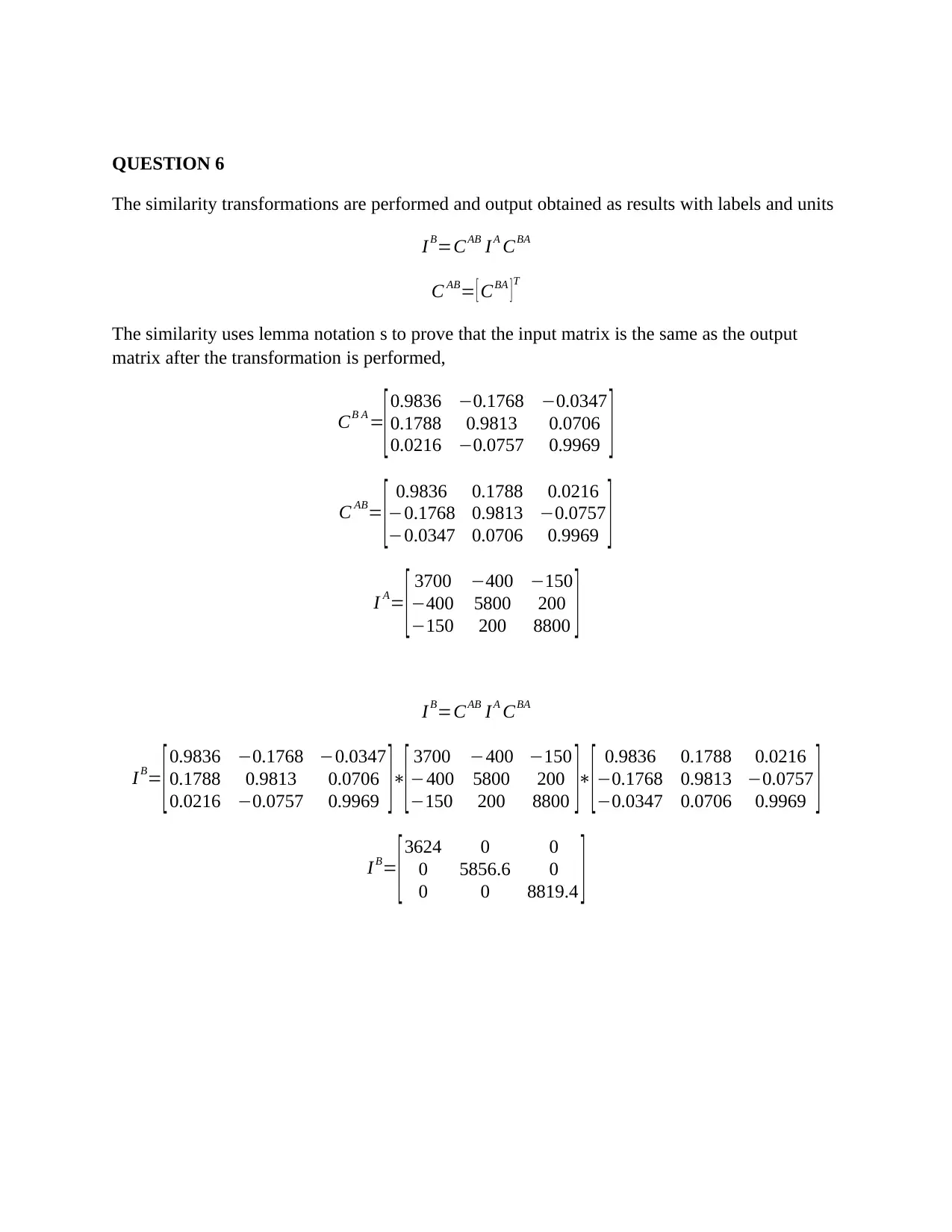
This assignment provides a comprehensive solution to analyzing satellite rotation, focusing on the principal moments of inertia (MOI) and the inertia matrix. It begins by establishing assumptions about the satellite as a rotating body and discusses the importance of principal axes. The solution details the computation of the inertia tensor, angular momentum, and rotational energy. MATLAB is utilized to compute eigenvalues and eigenvectors of the inertia matrix, and the results are interpreted to determine the Direction Cosine Matrix (DCM). The assignment further explores angular momentum values and applies gyro-sensor measurements to analyze angular velocity. Finally, similarity transformations are performed to validate the results, demonstrating the relationship between different coordinate systems and the inertia matrix. Desklib offers this solved assignment and many other resources to support students in their studies.





1 out of 9

Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.