4-Axis SCARA-RRT Robot Forward Kinematics: DH Table and Solution
VerifiedAdded on 2023/03/31
|4
|337
|170
Homework Assignment
AI Summary
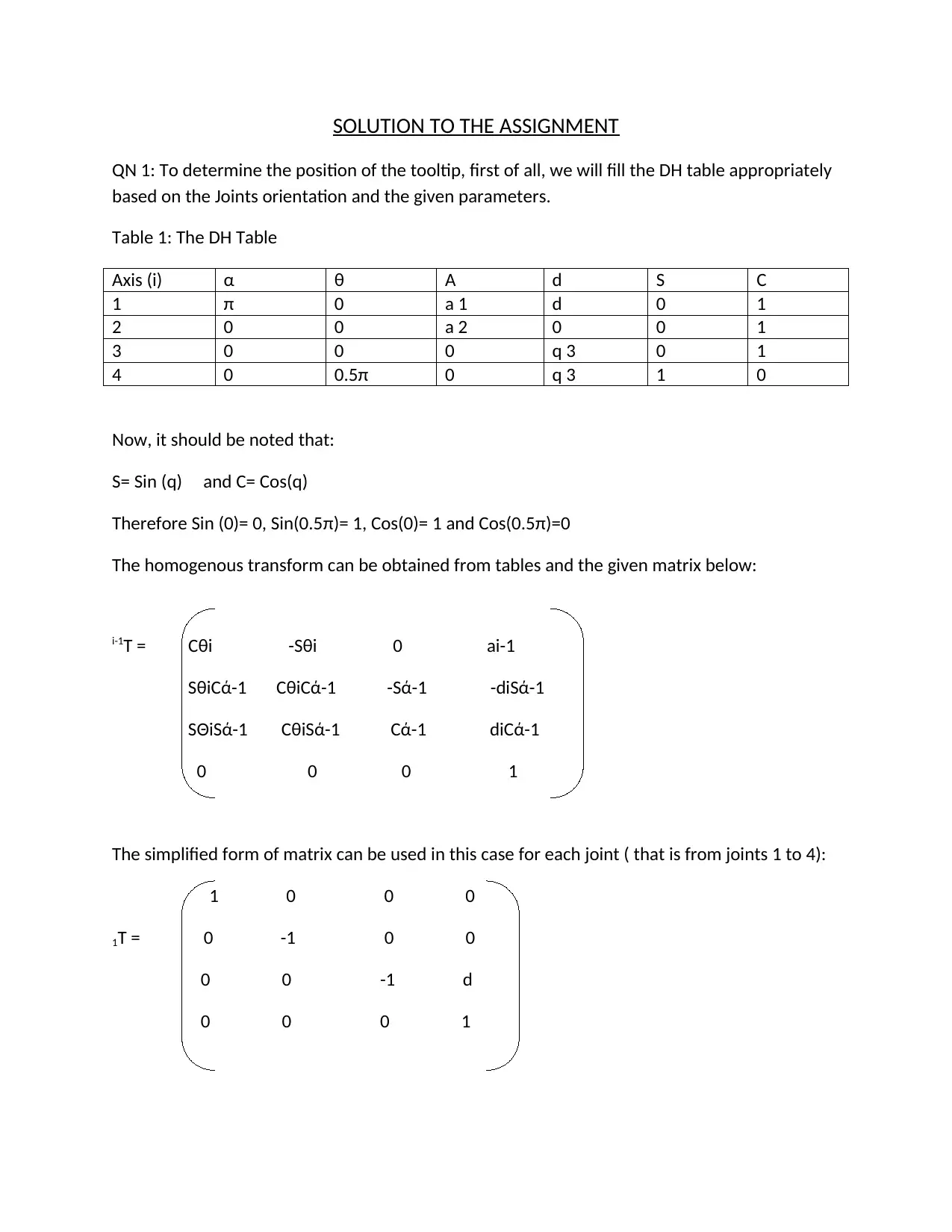
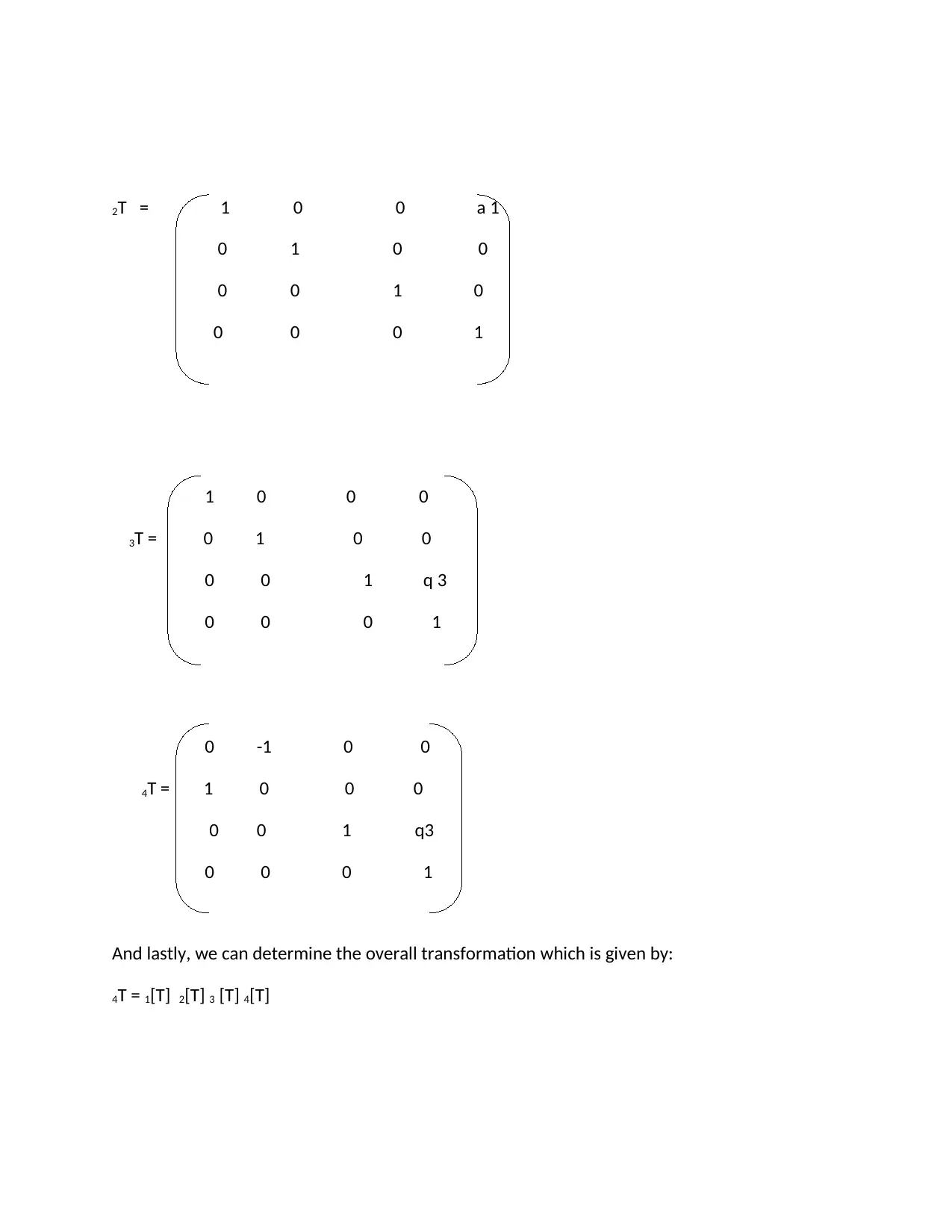
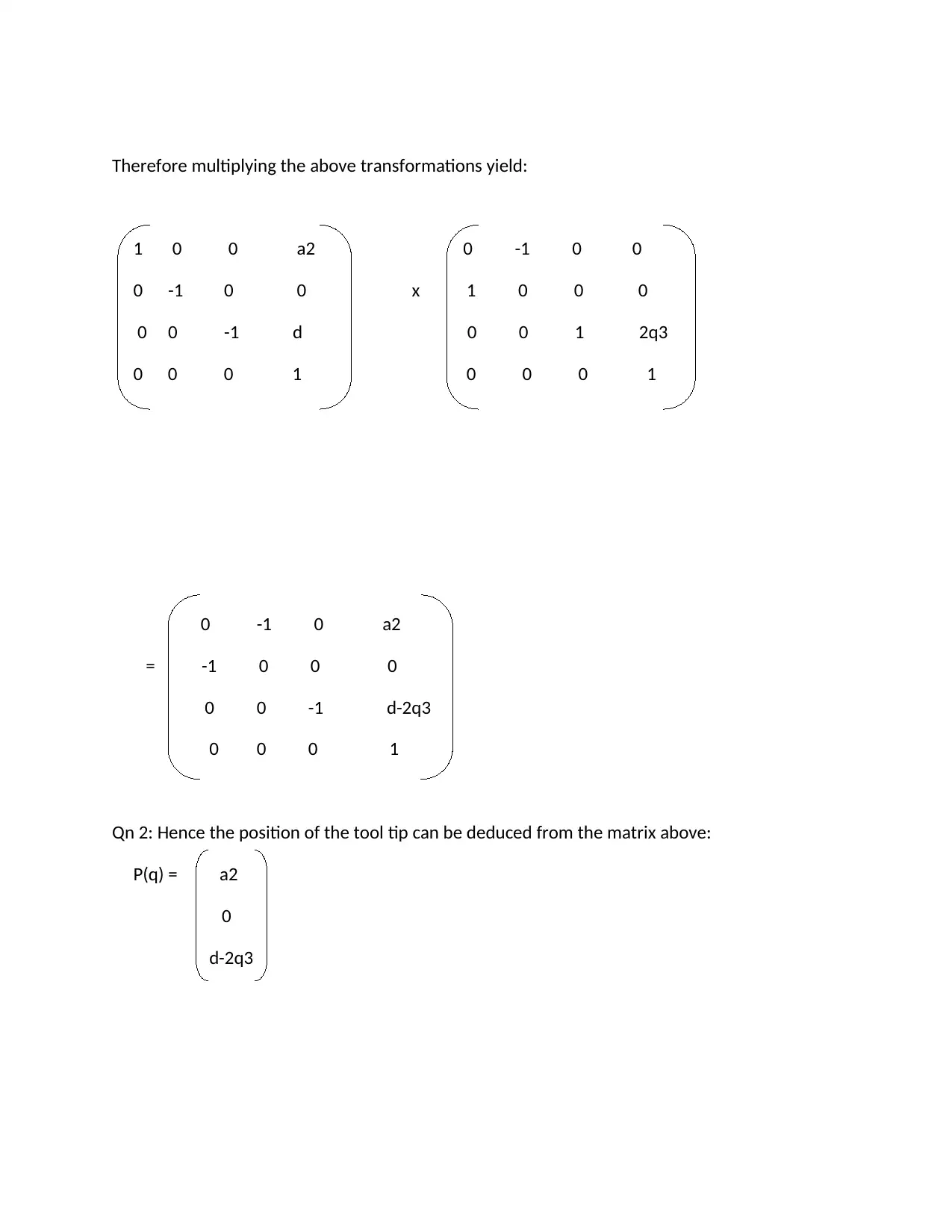
This assignment provides a comprehensive solution to the forward kinematics problem for a 4-axis SCARA-RRT robot. The solution begins by constructing the Denavit-Hartenberg (DH) table based on the robot's joint orientations and given parameters. The homogenous transformation matrices for each joint are then derived using the DH parameters. By multiplying these individual transformation matrices, the overall transformation matrix is obtained, which relates the tool tip position to the base coordinate system. Finally, the position of the tool tip is deduced from the overall transformation matrix, and the arm equations are combined to provide a complete kinematic description of the robot. This detailed solution allows for the determination of the tool's position in space based on the robot's joint variables.
1 out of 4
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.