University Course: Sensor Calibration & Testing Assignment Report
VerifiedAdded on 2021/04/21
|20
|2459
|151
Practical Assignment
AI Summary
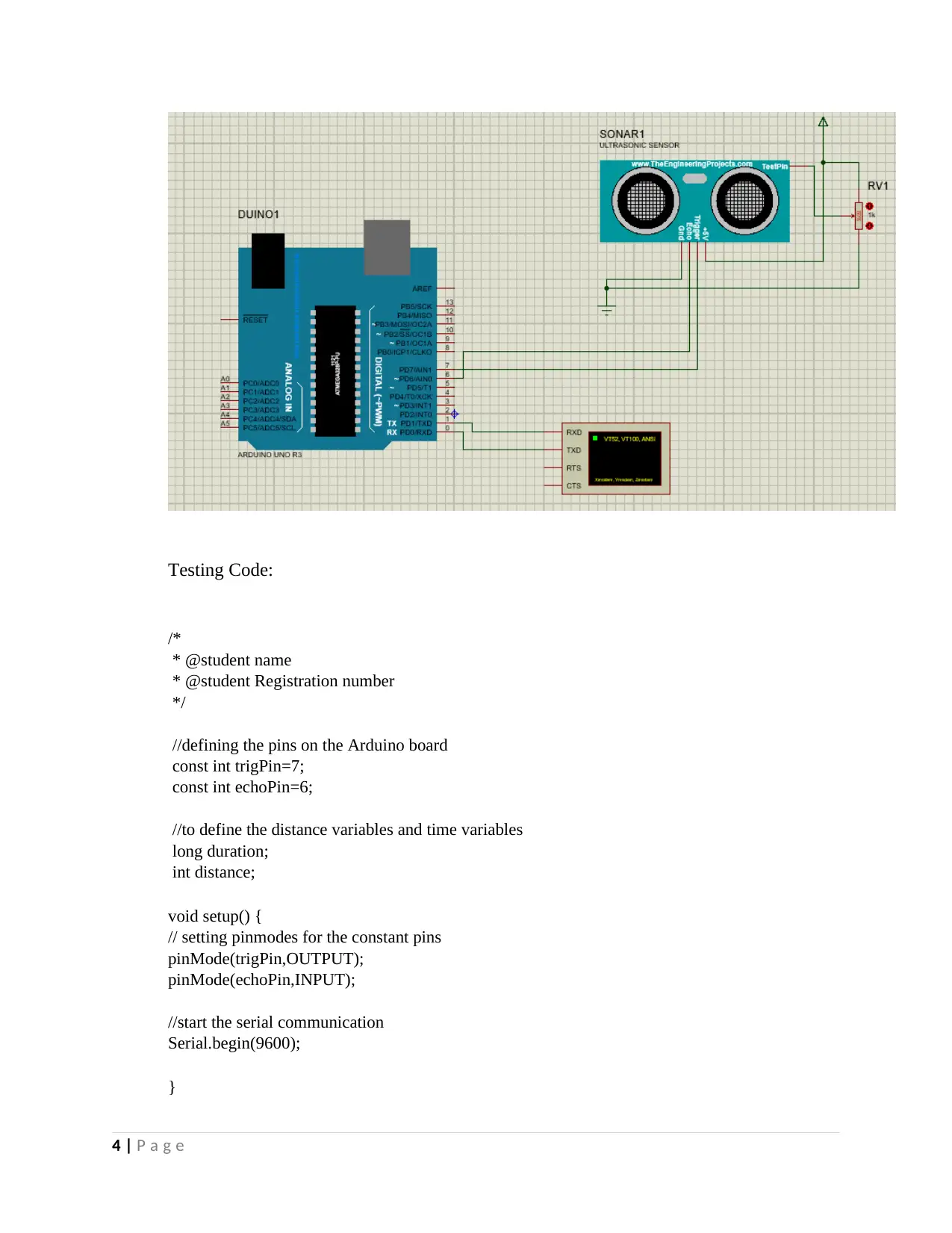
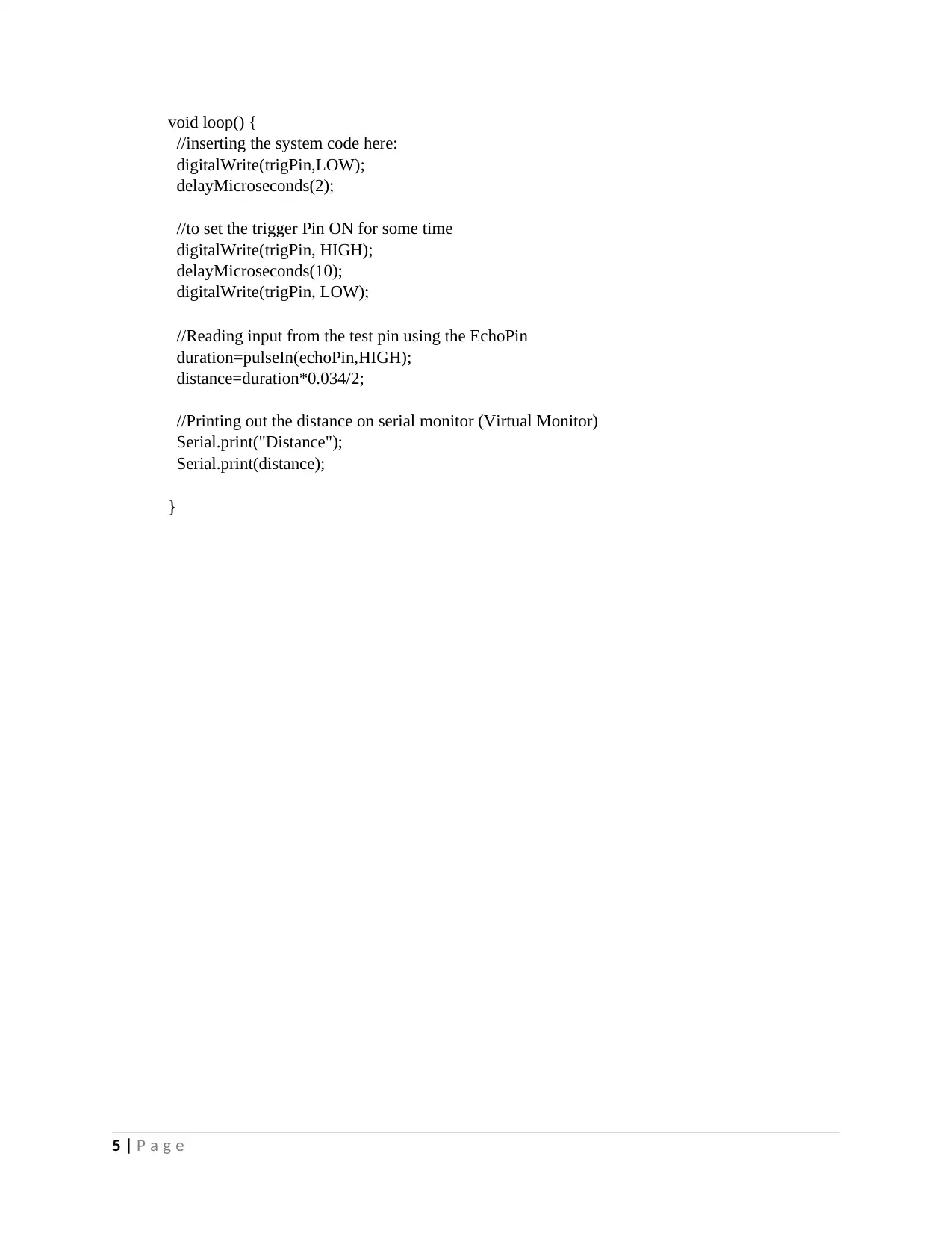
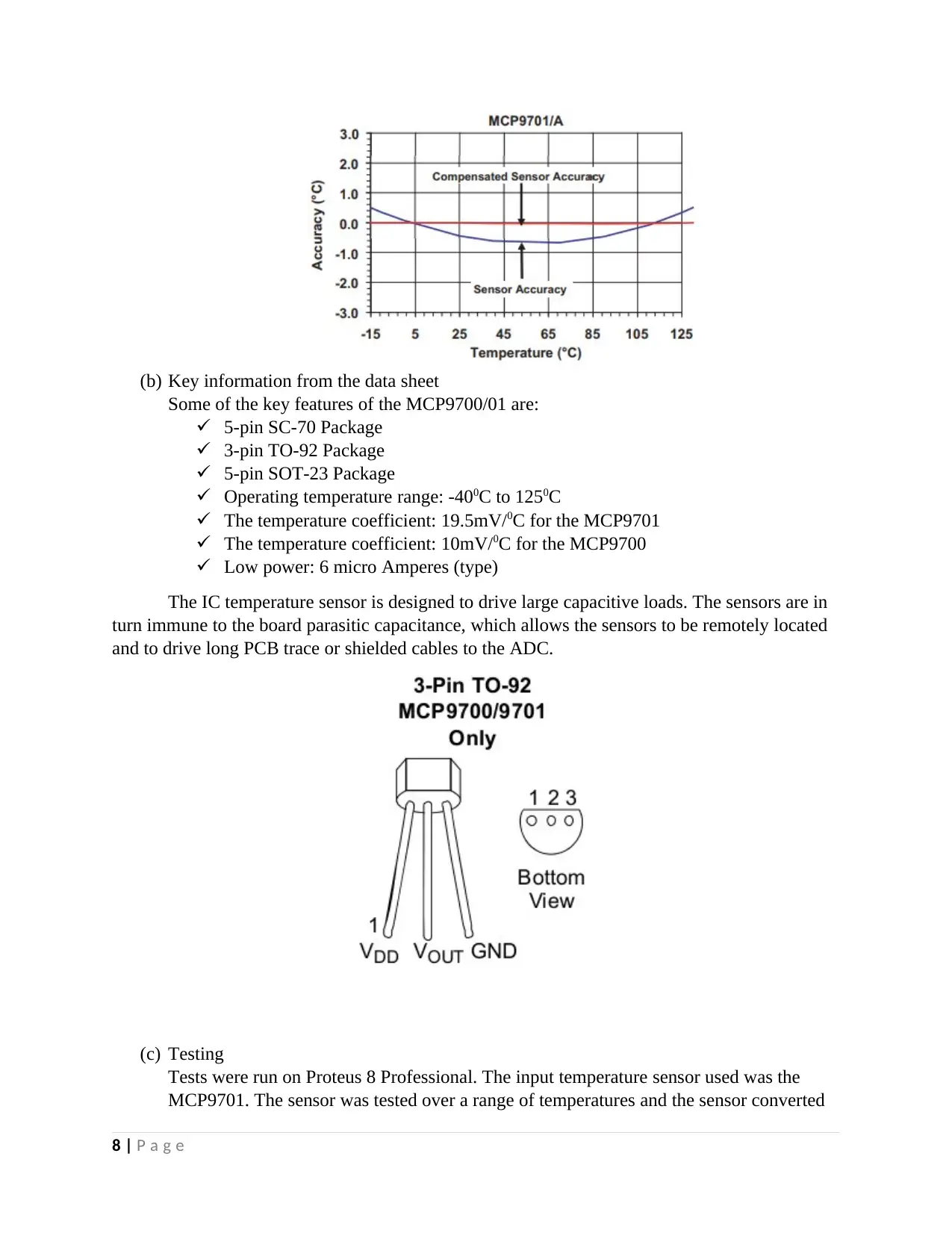
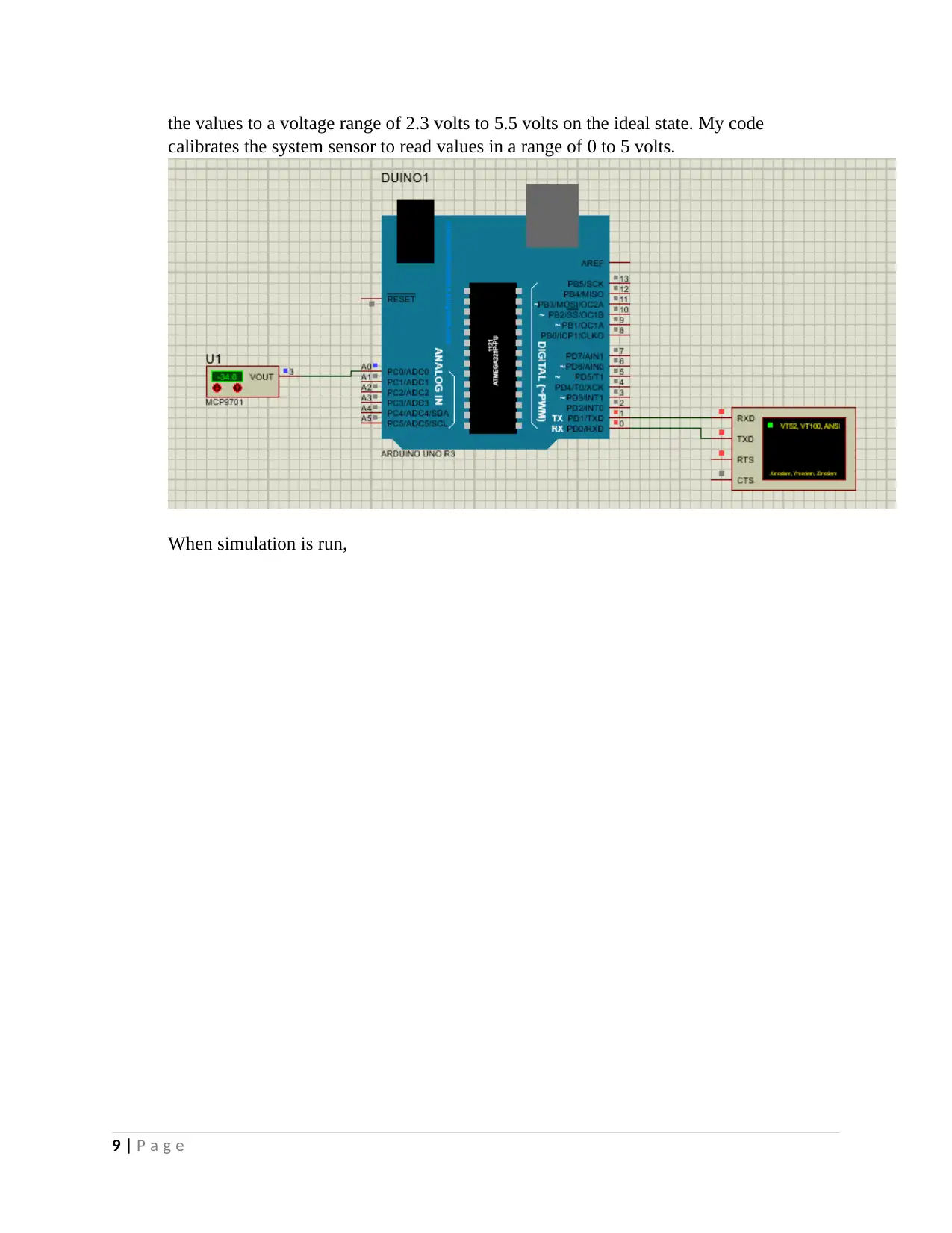
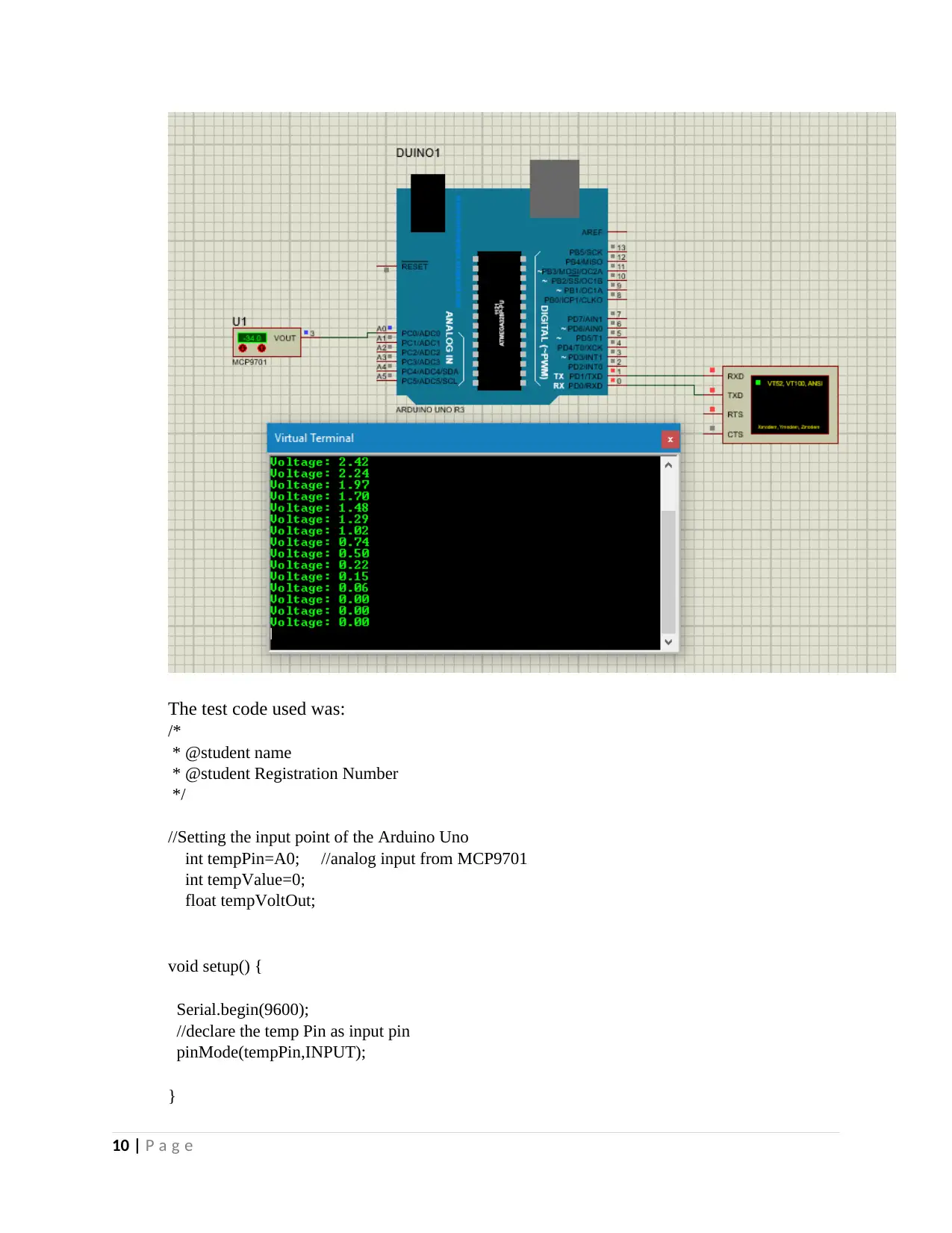
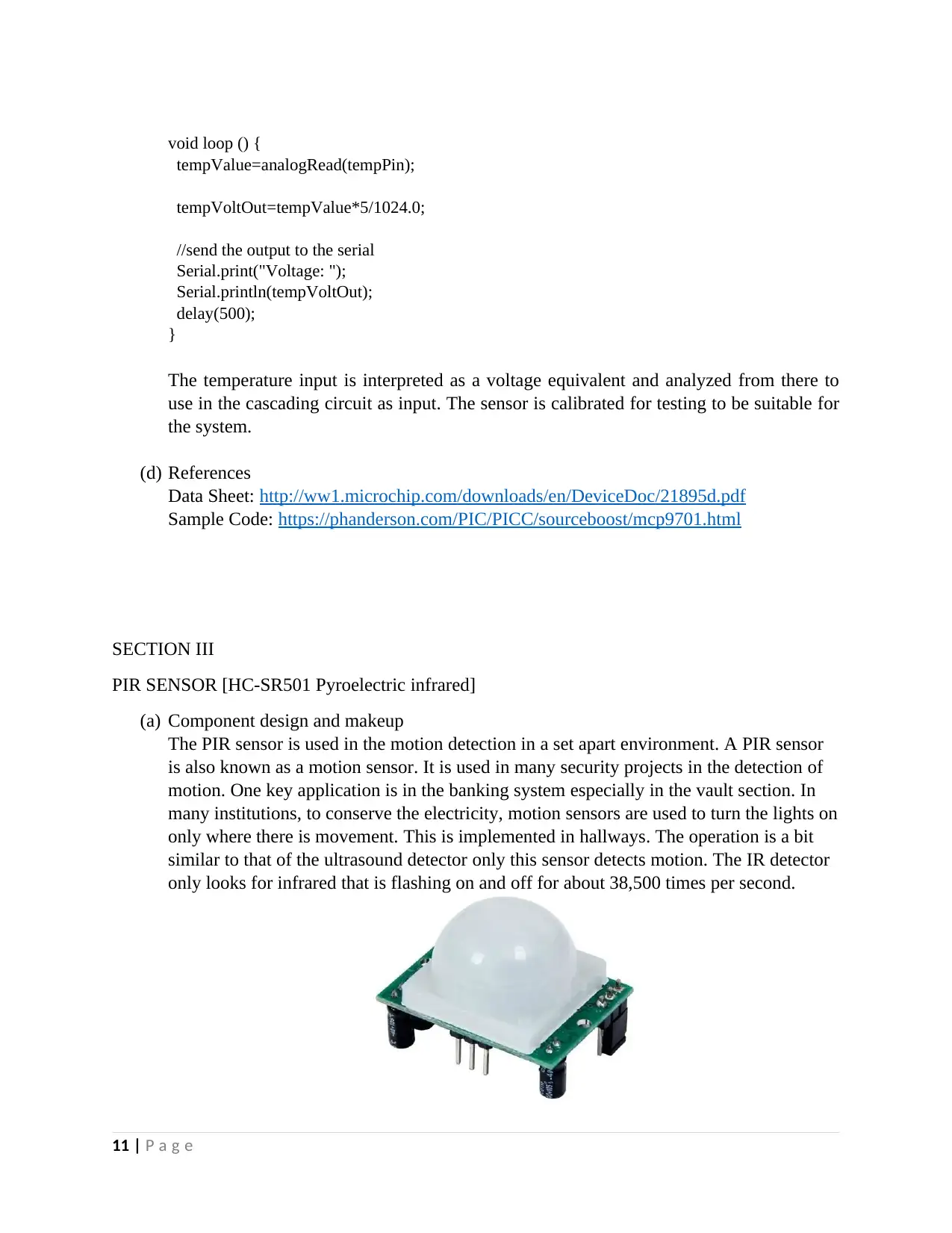
This assignment report details the calibration and testing of various sensors, including the ultrasonic module HC-SR04, temperature sensor MCP9700/9701, PIR sensor HC-SR501, and the TCRT5000 infrared reflective optical sensor. The report includes component descriptions, key information from datasheets, and testing procedures performed using Proteus 8 Professional and Arduino Uno. Each section covers the component design, key features, and testing codes used to analyze the sensor's functionality. The assignment demonstrates how to interface these sensors, interpret their outputs, and calibrate them for specific applications, such as distance measurement, temperature monitoring, motion detection, and object detection. The report also references relevant datasheets and sample code websites for further information.
1 out of 20



Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.