Analysis of Situational Awareness in Autonomous Vehicle Systems
VerifiedAdded on 2022/10/14
|8
|1478
|386
Report
AI Summary
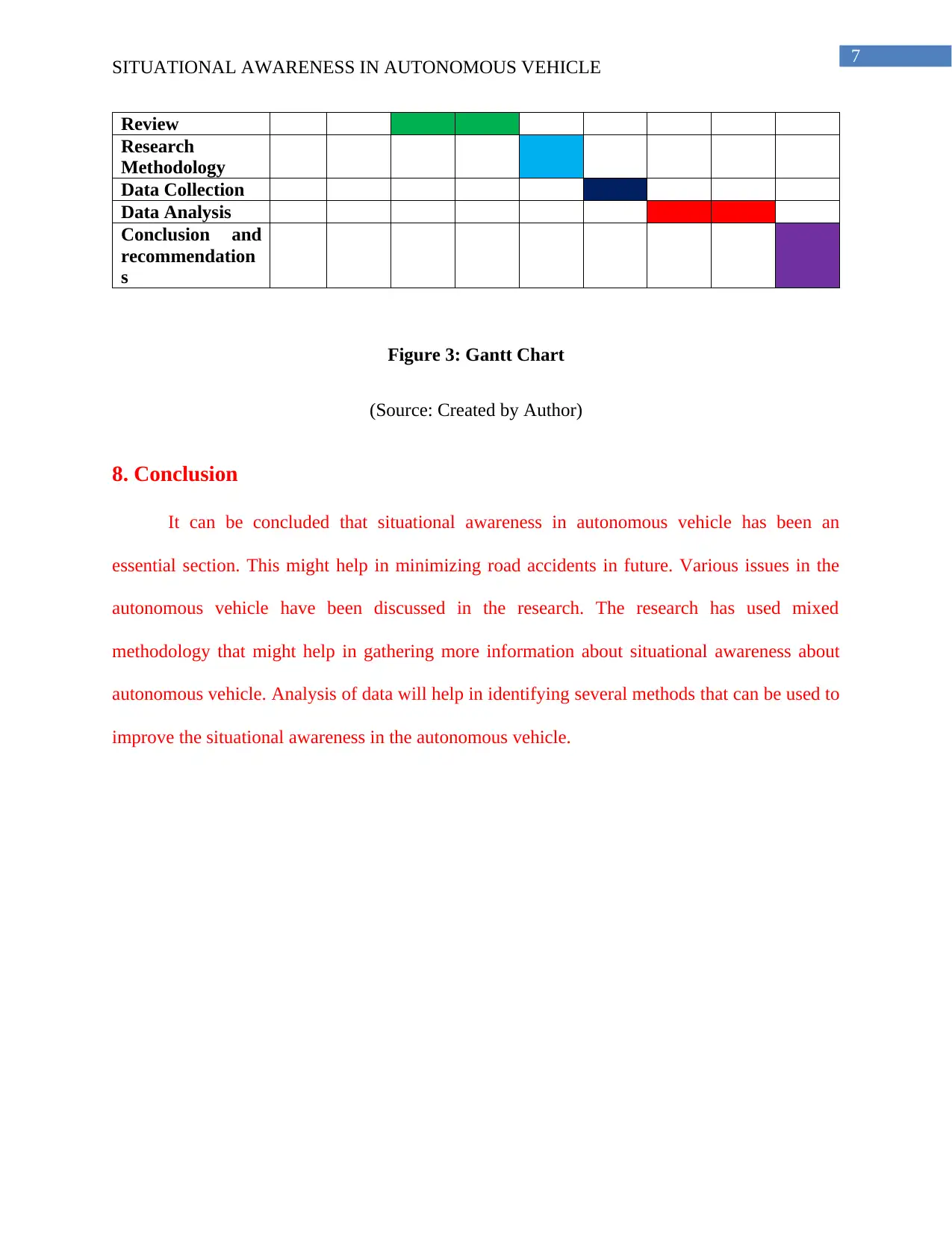
This report delves into the critical topic of situational awareness within autonomous vehicles, focusing on both the internal and external environmental factors that influence their performance. The research highlights road safety issues and the challenges autonomous vehicles face, particularly in identifying moving obstacles. The report aims to analyze data fusion models and external situational awareness to mitigate these issues. The research methodology employs a mixed-methods approach, combining qualitative and quantitative data collection techniques, including online surveys with drivers of autonomous vehicles and interviews with senior drivers. The project timeline outlines key stages, from research planning and literature review to data collection, analysis, and conclusion. The findings aim to identify and recommend strategies for enhancing situational awareness, ultimately contributing to improved road safety and the advancement of autonomous vehicle technology. Ethical considerations, including data protection, are also addressed.


1 out of 8
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.