Split Phase Motor Control: Diagram, Methods and Applications
VerifiedAdded on 2023/06/11
|10
|819
|469
Report
AI Summary
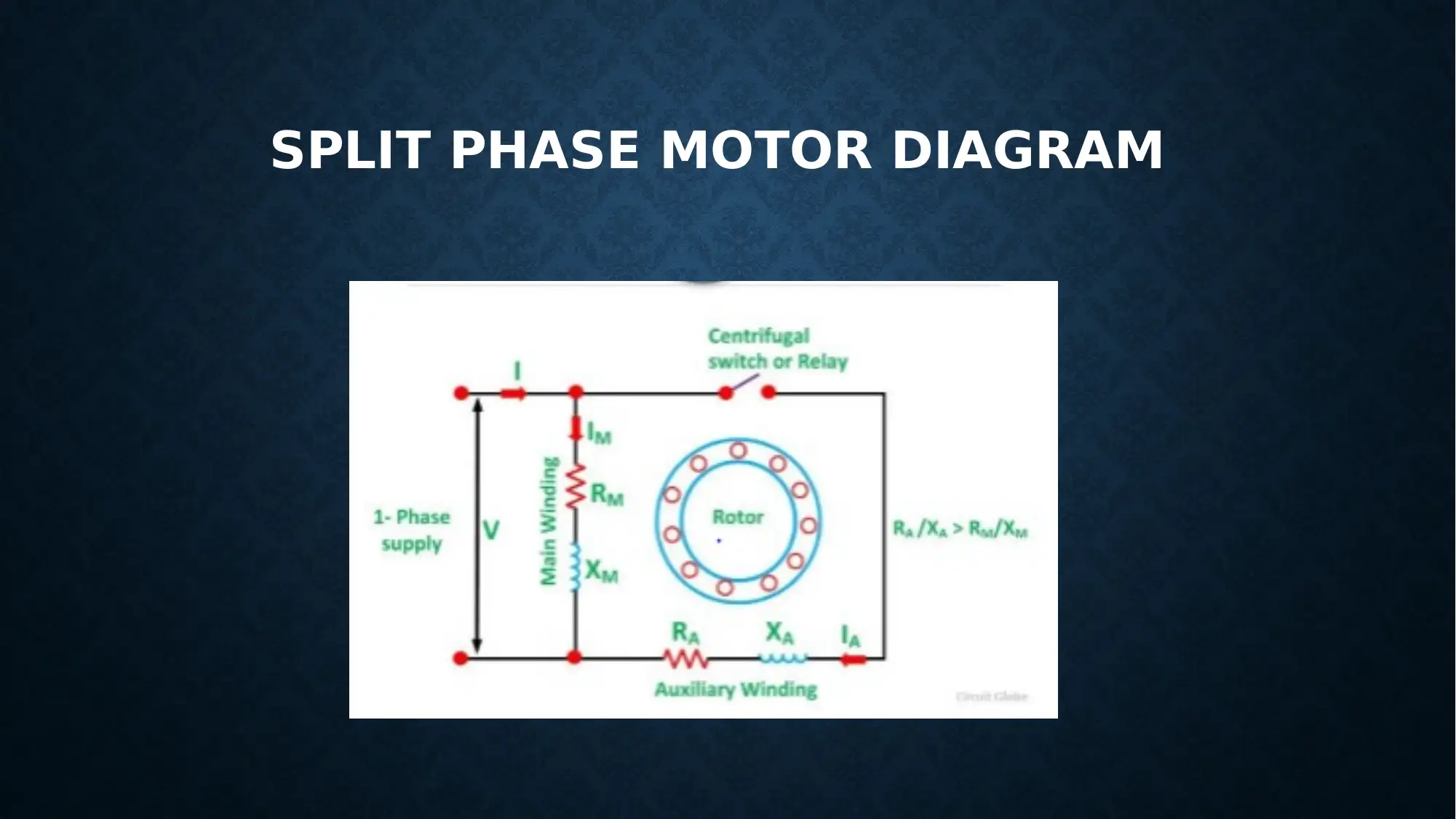
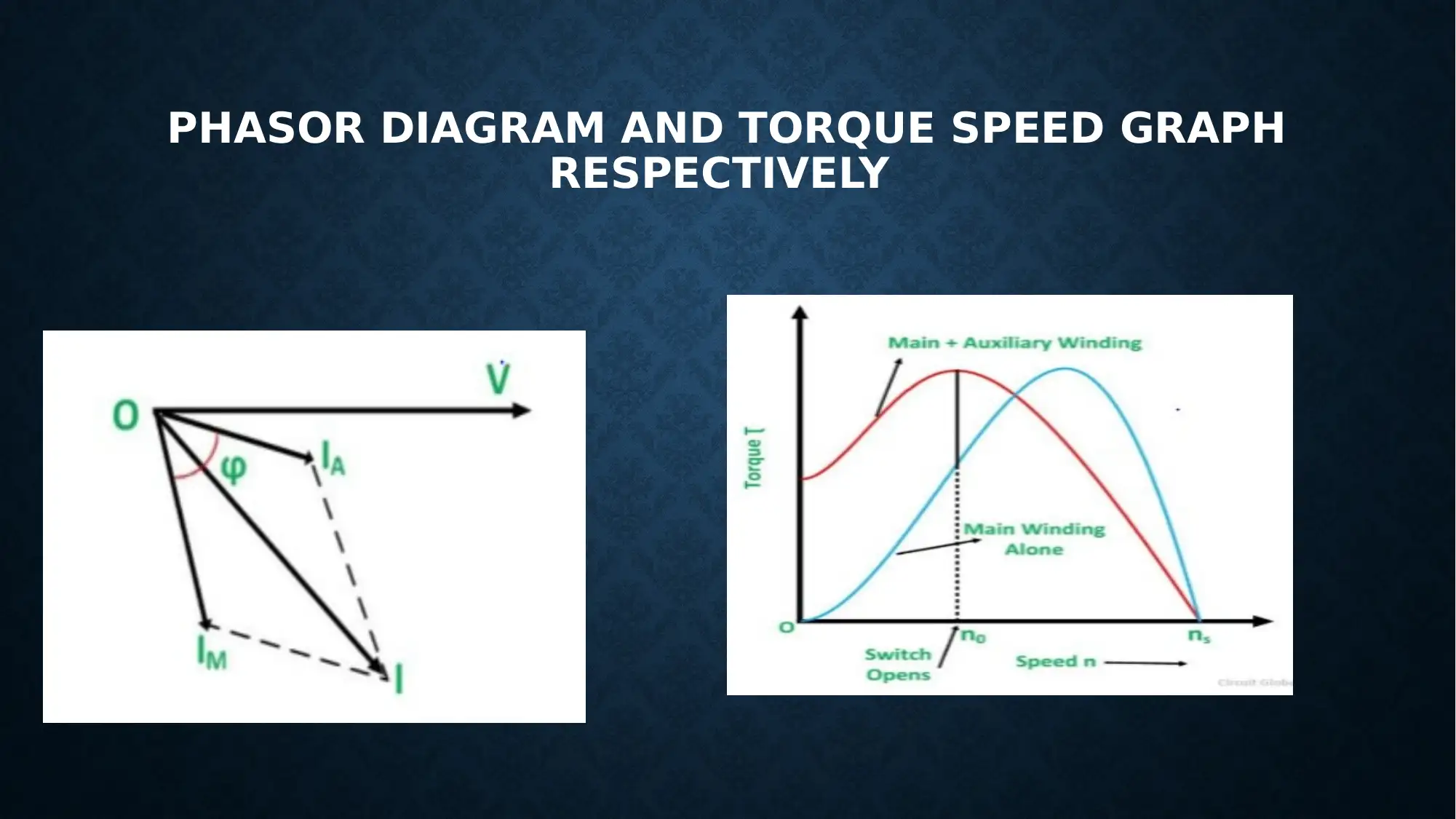
This report provides an overview of split phase motor control, detailing the motor's construction with a single cage blade and stator containing main and initial windings. It explains the operational principles, including the role of centrifugal switches and transfer relays in controlling the windings. The report further discusses various control methods, such as altering the number of poles, cascading the motors, modifying the frequency and source power, and adding blade resistance. Phasor diagrams and torque-speed graphs are included to illustrate the motor's behavior under different control conditions. This document is available on Desklib, a platform offering a range of study tools and solved assignments for students.

1 out of 10
Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.