UOW ENGG592 Engineering Computing Assignment 2: Spring-Mass and Heat
VerifiedAdded on 2020/05/01
|8
|672
|333
Homework Assignment
AI Summary
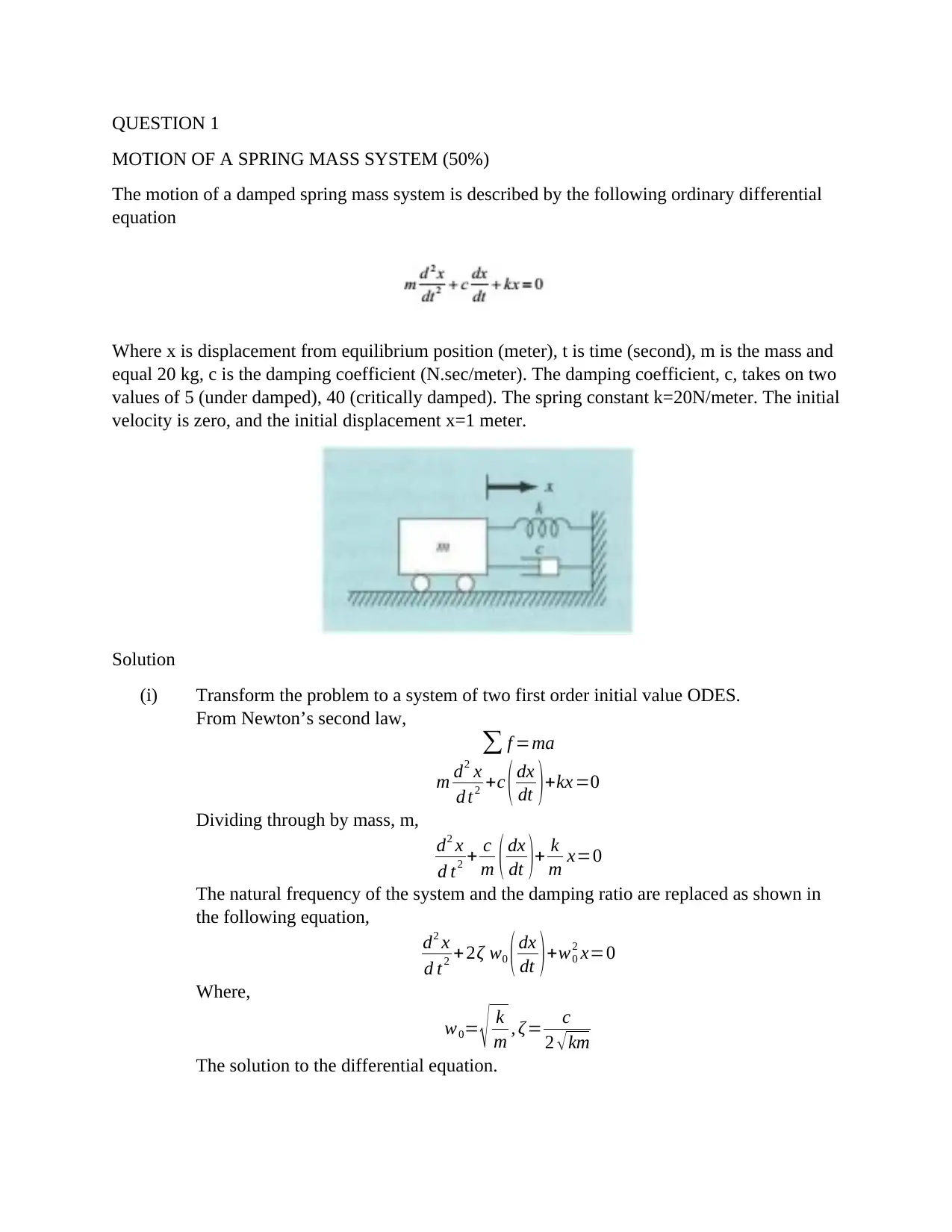
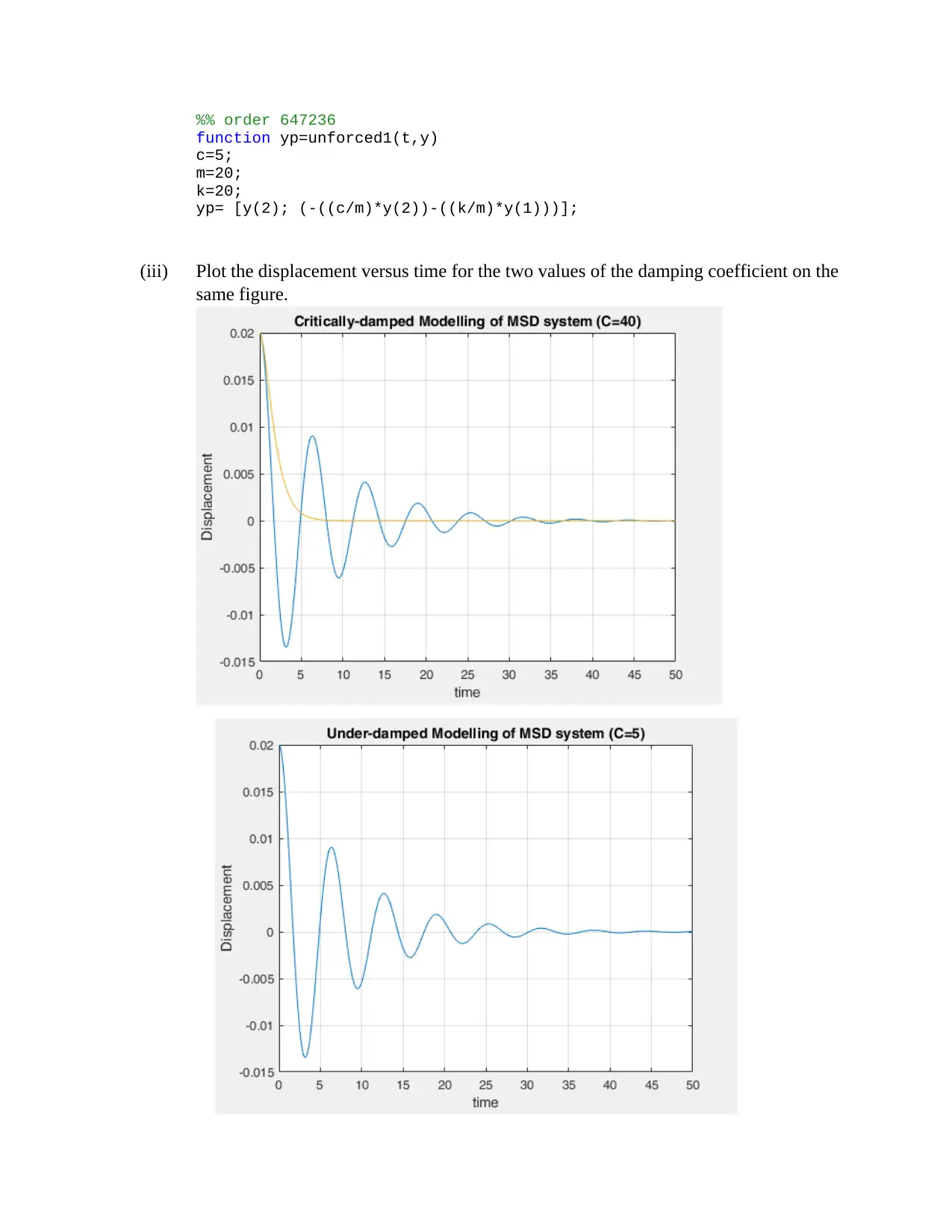
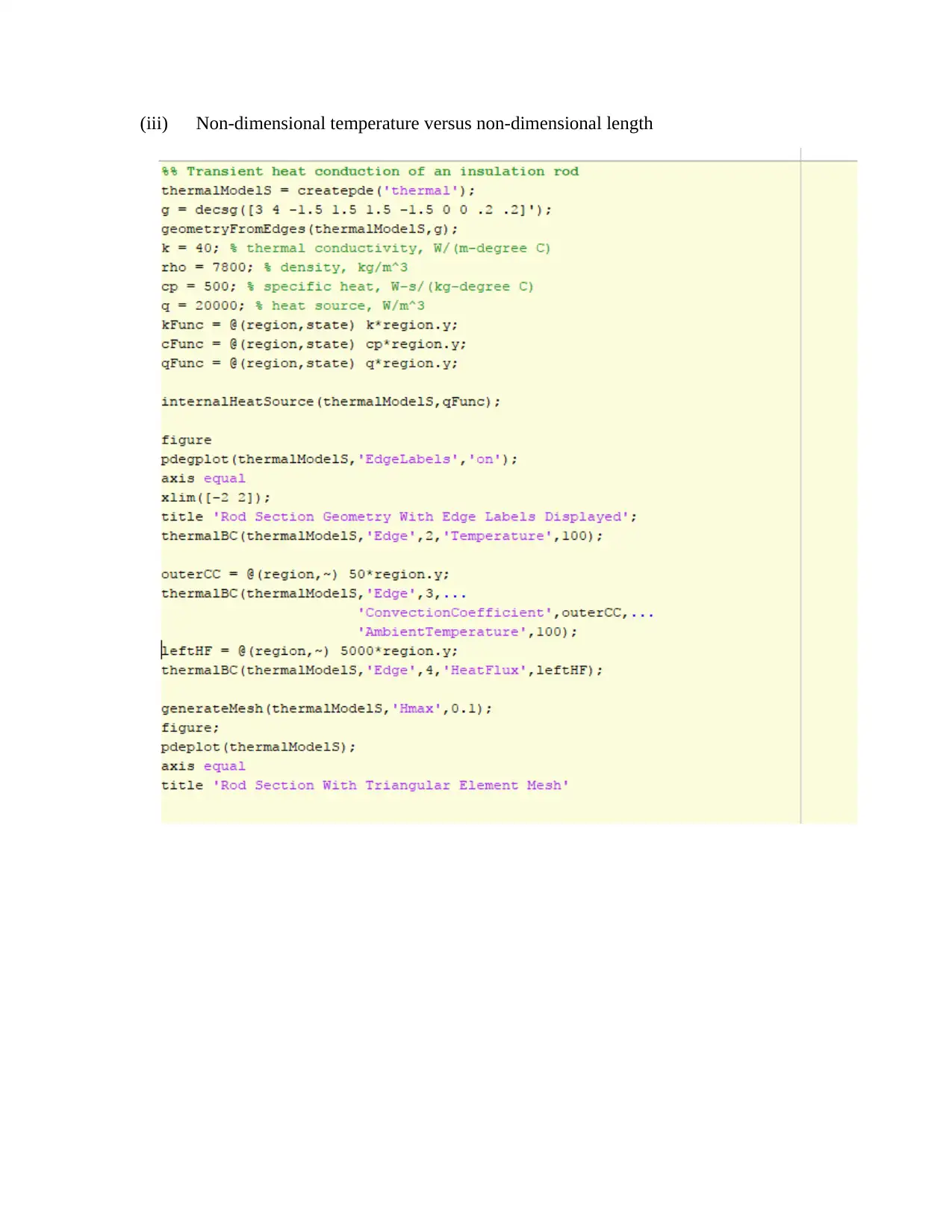
This assignment solution addresses two key engineering problems: the motion of a damped spring-mass system and transient heat conduction. The spring-mass system analysis involves solving an ordinary differential equation (ODE) to model the displacement of a mass, considering both under-damped and critically damped scenarios. The solution uses numerical methods, specifically the second-order Runge-Kutta Heun method, and includes Matlab code to plot the displacement over time. The heat conduction problem is solved using explicit finite difference and implicit Crank-Nicholson methods. The solution describes the non-dimensional form of the heat equation, boundary conditions, and the discretization process. The assignment provides a comprehensive analysis using numerical techniques to simulate and understand the behavior of both systems.



1 out of 8
Related Documents





Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.