Analyzing Dynamics and Solutions in Theoretical Physics Models
VerifiedAdded on 2020/04/01
|22
|604
|52
Homework Assignment
AI Summary
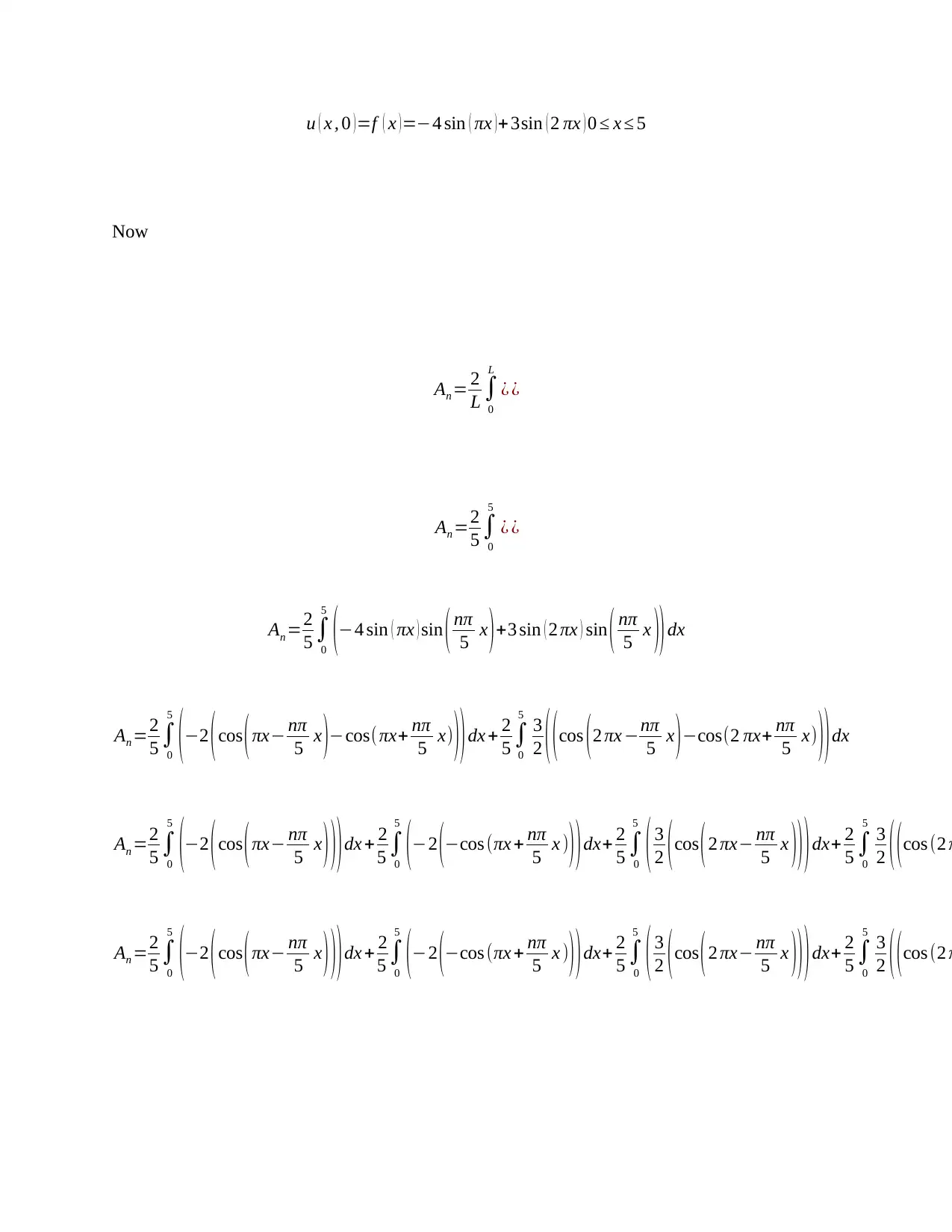
The homework assignment involves a detailed exploration of several advanced concepts in theoretical physics. It starts by examining particle motion through the lens of Hamiltonian and Lagrangian mechanics, emphasizing energy conservation principles. The assignment further delves into solving heat equations with specific boundary conditions, leveraging Fourier series for convergence analysis. Additionally, it addresses electromagnetic field dynamics in special relativity contexts, using trial trajectories to explore gravitational effects. Key components include deriving solutions under various constraints and analyzing theoretical implications through Newtonian mechanics and Feynman's proposals. The comprehensive approach offers insights into the fundamental principles governing these physical systems.











1 out of 22
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.