University Top Dynamics Assignment 2 Solution: Mechanical Engineering
VerifiedAdded on 2022/11/11
|8
|1626
|285
Homework Assignment
AI Summary
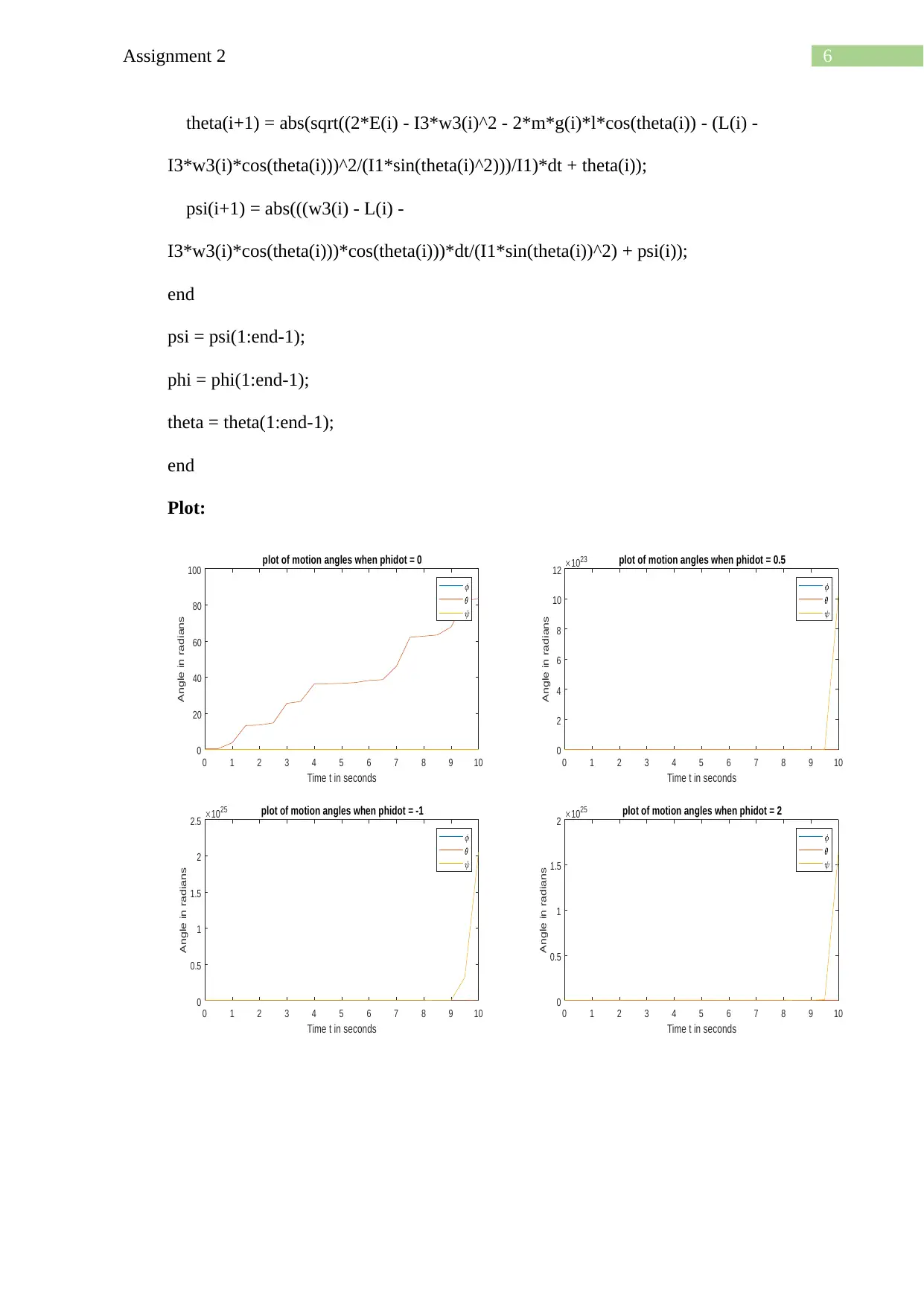
This document provides a complete solution to Assignment 2 on Top Dynamics, covering the analysis of a rotating axisymmetric rigid body under a constant gravitational field. The solution begins by redoing Example 755 from a textbook, deriving and proving the relevant differential equations and integrals of motion. It then proceeds to calculate and plot the possible motions of the top for various initial conditions, including a case with zero initial angular velocity. The assignment utilizes MATLAB to simulate the system, providing code for calculating Euler angles and plotting the results. Furthermore, the solution extends the analysis to a scenario where the gravitational acceleration varies with time, modifying the MATLAB code to accommodate this change and analyzing the resulting motion. The document includes detailed explanations, mathematical derivations, and MATLAB code snippets, making it a valuable resource for students studying mechanical engineering and dynamics.


1 out of 8
Related Documents




Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.