Unmanned Aircraft Vehicle (UAV) Pilot Identification PhD Thesis
VerifiedAdded on 2023/01/11
|32
|6106
|32
Thesis and Dissertation
AI Summary
This PhD thesis by Ahmed Saeed Al Shemeili, submitted to Khalifa University in February 2019, investigates the identification of Unmanned Aerial Vehicle (UAV) pilots using a novel machine learning approach. The research applies logistic regression, random forest, and neural network models, leveraging radio-controlled (RC) measurement features to detect rogue drones. The study finds that the machine learning approach performs effectively at higher altitudes, with detection accuracy decreasing at lower altitudes. The thesis includes an analysis of the random forest algorithm to identify key features for pilot identification, potentially enhancing feature selection and the development of artificial intelligence applications. The document covers the technological framework of UAVs, including navigation, control, and communication, and reviews related works in these areas. The research methodology, including data collection and tools used, is detailed, along with preliminary results and conclusions. The thesis also includes an acknowledgment section, a declaration of originality, and a table of contents, figures, and tables. The project's aim is to propose a novel machine learning approach to determine rogue UAVs in space based on radio waves sent by User Equipment (UEs) to Base Stations (BSs).
Running head: UAV PILOT IDENTIFICATION
1
Unmanned Aircraft Vehicle
(UAV) Pilot Identification Using
Machine Learning
Ahmed Saeed Al Shemeili
PhD. Thesis
February 2019
A thesis submitted to Khalifa University of Science and Technology in accordance with the
requirements of the degree of PhD in Engineering in the Department of (Electrical and
Computer Engineering).
1
Unmanned Aircraft Vehicle
(UAV) Pilot Identification Using
Machine Learning
Ahmed Saeed Al Shemeili
PhD. Thesis
February 2019
A thesis submitted to Khalifa University of Science and Technology in accordance with the
requirements of the degree of PhD in Engineering in the Department of (Electrical and
Computer Engineering).
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
UAV PILOT IDENTIFICATION 2
Unmanned Aircraft Vehicle (UAV) Pilot Identification Using Machine Learning
by
Ahmed Saeed Al Shemeili
A thesis submitted in partial fulfillment of the
requirements for the degree of
PhD in Engineering
at
Khalifa University
Thesis Committee
Dr. Abdulhadi Shoufan (Supervisor),
Khalifa University
Prof. Ernesto Damiani (Co-Supervisor)
Khalifa University
Dr. VWY (Industrial Supervisor),
EBTIC
Prof. XYZ (External Examiner &
Committee Chair),
University of TTT
Dr. MNV (Internal Examiner)
Khalifa University
February 2019
Unmanned Aircraft Vehicle (UAV) Pilot Identification Using Machine Learning
by
Ahmed Saeed Al Shemeili
A thesis submitted in partial fulfillment of the
requirements for the degree of
PhD in Engineering
at
Khalifa University
Thesis Committee
Dr. Abdulhadi Shoufan (Supervisor),
Khalifa University
Prof. Ernesto Damiani (Co-Supervisor)
Khalifa University
Dr. VWY (Industrial Supervisor),
EBTIC
Prof. XYZ (External Examiner &
Committee Chair),
University of TTT
Dr. MNV (Internal Examiner)
Khalifa University
February 2019

Abstract
This document focus on identification of Unmanned Aerial Vehicle using a novel
machine learning approach. In doing so, three classification machine learning models
including logistics regression, random forest and neural network are applied by using radio
controlled RC measurement features to detect rogue drones. The findings suggest that for
high altitude the proposed machine learning approach can perform effectively compared to
lower altitudes since the detection degrades with decrease in altitudes.
Indexing Terms: UAV, machine learning, random forest, ensemble, bagging, MATLAB.
This document focus on identification of Unmanned Aerial Vehicle using a novel
machine learning approach. In doing so, three classification machine learning models
including logistics regression, random forest and neural network are applied by using radio
controlled RC measurement features to detect rogue drones. The findings suggest that for
high altitude the proposed machine learning approach can perform effectively compared to
lower altitudes since the detection degrades with decrease in altitudes.
Indexing Terms: UAV, machine learning, random forest, ensemble, bagging, MATLAB.
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
Acknowledgement
Undertaking this PhD has been a major work experience change for me where I shift
my career from networking in cyber security and artificial intelligence and this was possible
with the support I received from many people and Khalifa University.
I would like first to thank my supervisor Dr. Abdulhadi Shoufan for all the support he
gave me and the continuous feedback, which helps during my PhD study.
Many thanks to Prof. Ernest Damiani for his support and guidance to ensure that my
PhD study will be successful and of benefit to our society
I gratefully acknowledge the funding received towards my PhD from Khalifa
University. Thanks to Prof. Mahmoud Al Qutairi for supporting my study at Khalifa
University. Thanks to my Father, Mom, Brothers and sisters
Thank you my Wife and kids
Undertaking this PhD has been a major work experience change for me where I shift
my career from networking in cyber security and artificial intelligence and this was possible
with the support I received from many people and Khalifa University.
I would like first to thank my supervisor Dr. Abdulhadi Shoufan for all the support he
gave me and the continuous feedback, which helps during my PhD study.
Many thanks to Prof. Ernest Damiani for his support and guidance to ensure that my
PhD study will be successful and of benefit to our society
I gratefully acknowledge the funding received towards my PhD from Khalifa
University. Thanks to Prof. Mahmoud Al Qutairi for supporting my study at Khalifa
University. Thanks to my Father, Mom, Brothers and sisters
Thank you my Wife and kids
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser

Declaration and Copyright
Declaration
I declare that the work in this thesis was carried out in accordance with the regulations
of Khalifa University of Science and Technology. The work is entirely my own except where
indicated by special reference in the text. Any views expressed in the thesis are those of the
author and in no way represent those of Khalifa University of Science and Technology. No
part of the thesis has been presented to any other university for any degree.
Author Name: Ahmed Saeed Al Shemeili
Author Signature:
Date: 24-02-2019
Copyright ©
No part of this thesis may be reproduced, stored in a retrieval system, or transmitted,
in any form or by any means, electronic, mechanical, photocopying, recording, scanning or
otherwise, without prior written permission of the author. The thesis may be made available
for consultation in Khalifa University of Science and Technology Library and for inter-
library lending for use in another library and may be copied in full or in part for any bona fide
library or research worker, on the understanding that users are made aware of their
obligations under copyright, i.e. that no quotation and no information derived from it may be
published without the author's prior consent.
Declaration
I declare that the work in this thesis was carried out in accordance with the regulations
of Khalifa University of Science and Technology. The work is entirely my own except where
indicated by special reference in the text. Any views expressed in the thesis are those of the
author and in no way represent those of Khalifa University of Science and Technology. No
part of the thesis has been presented to any other university for any degree.
Author Name: Ahmed Saeed Al Shemeili
Author Signature:
Date: 24-02-2019
Copyright ©
No part of this thesis may be reproduced, stored in a retrieval system, or transmitted,
in any form or by any means, electronic, mechanical, photocopying, recording, scanning or
otherwise, without prior written permission of the author. The thesis may be made available
for consultation in Khalifa University of Science and Technology Library and for inter-
library lending for use in another library and may be copied in full or in part for any bona fide
library or research worker, on the understanding that users are made aware of their
obligations under copyright, i.e. that no quotation and no information derived from it may be
published without the author's prior consent.
Table of Contents
Abstract.......................................................................................................................................i
Acknowledgement....................................................................................................................iii
Declaration and Copyright..........................................................................................................i
Declaration.............................................................................................................................i
Copyright ©...........................................................................................................................i
List of Figures...........................................................................................................................iii
List of tables..............................................................................................................................iv
List of Abbreviations..................................................................................................................v
CHAPTER 1...............................................................................................................................6
1.0 Introduction....................................................................................................................6
The Aim of the Project.......................................................................................................12
Project Objective................................................................................................................12
CHAPTER 2.............................................................................................................................12
Related Works....................................................................................................................12
Fundamental technological framework of UAV..........................................................12
Drones and cyber security..............................................................................................16
CHAPTER 3.............................................................................................................................17
3.0 Research Methodology.................................................................................................17
Techniques to be used.....................................................................................................17
Data Collection................................................................................................................18
Tools and Applications...................................................................................................19
CHAPTER 4.............................................................................................................................21
Preliminary Results........................................................................................................21
Five Pilots Dataset...........................................................................................................21
CHAPTER 5.............................................................................................................................29
Abstract.......................................................................................................................................i
Acknowledgement....................................................................................................................iii
Declaration and Copyright..........................................................................................................i
Declaration.............................................................................................................................i
Copyright ©...........................................................................................................................i
List of Figures...........................................................................................................................iii
List of tables..............................................................................................................................iv
List of Abbreviations..................................................................................................................v
CHAPTER 1...............................................................................................................................6
1.0 Introduction....................................................................................................................6
The Aim of the Project.......................................................................................................12
Project Objective................................................................................................................12
CHAPTER 2.............................................................................................................................12
Related Works....................................................................................................................12
Fundamental technological framework of UAV..........................................................12
Drones and cyber security..............................................................................................16
CHAPTER 3.............................................................................................................................17
3.0 Research Methodology.................................................................................................17
Techniques to be used.....................................................................................................17
Data Collection................................................................................................................18
Tools and Applications...................................................................................................19
CHAPTER 4.............................................................................................................................21
Preliminary Results........................................................................................................21
Five Pilots Dataset...........................................................................................................21
CHAPTER 5.............................................................................................................................29
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide

Conclusion...........................................................................................................................29
Moving Forward.............................................................................................................30
Project Time Plan...............................................................................................................30
Moving Forward.............................................................................................................30
Project Time Plan...............................................................................................................30
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
List of Figures
Figure 1: Navigation system architecture ………………………………………..…14
Figure 2: UAV directions………………………………………………………….….15
Figure 3: General architecture of a drone including the ground control station….16
Fig 4: UAV detection …………………………………………………………………..17
Figure 5: Cross validation……………………………………………………………...20
Figure 6: Performance of all classifiers on the same dataset………...………………22
Figure 7. Features test accuracy with different crosses starting from 50% up to
98%....................................................................................................................................24
Figure8: Single features output compared to all features output accuracy………...25
Figure 9: All Data Vs. RC Data Classification Performance………………………...26
Figure 10: Pilot performance…………………………………………………………..27
Figure 11: project timeline plan……………………………………………………….31
List of tables
Table 1: Pilots data…………………………………………………………………….20
Table 2: Different classifiers accuracy test…………………………………………..21
Table 3: Cross validation test…………………………………………………………23
Table 4: Single feature test……………………………………………………….…..24
Table 5. Effectiveness order of the features…………………………….………..….25
Table 6: All data vs RC data performance………………………………………….26
Table 7: Pilot performance…………………………………………………………...27
Table 8: Features accuracy test……………………………………………………...29
Figure 1: Navigation system architecture ………………………………………..…14
Figure 2: UAV directions………………………………………………………….….15
Figure 3: General architecture of a drone including the ground control station….16
Fig 4: UAV detection …………………………………………………………………..17
Figure 5: Cross validation……………………………………………………………...20
Figure 6: Performance of all classifiers on the same dataset………...………………22
Figure 7. Features test accuracy with different crosses starting from 50% up to
98%....................................................................................................................................24
Figure8: Single features output compared to all features output accuracy………...25
Figure 9: All Data Vs. RC Data Classification Performance………………………...26
Figure 10: Pilot performance…………………………………………………………..27
Figure 11: project timeline plan……………………………………………………….31
List of tables
Table 1: Pilots data…………………………………………………………………….20
Table 2: Different classifiers accuracy test…………………………………………..21
Table 3: Cross validation test…………………………………………………………23
Table 4: Single feature test……………………………………………………….…..24
Table 5. Effectiveness order of the features…………………………….………..….25
Table 6: All data vs RC data performance………………………………………….26
Table 7: Pilot performance…………………………………………………………...27
Table 8: Features accuracy test……………………………………………………...29
List of Abbreviations
GCS: Ground Control Station
GPS: Global Positioning System
IMU: Internal Measurement Unit
IVDR: In-Vehicle Data Recorders
SDN: Software Defined Network
RC: Remote Control
UAV: Unmanned Aircraft Vehicle
UE: User Equipment
SIM: Simulated Identity Module
BSs: Base Stations
GCS: Ground Control Station
GPS: Global Positioning System
IMU: Internal Measurement Unit
IVDR: In-Vehicle Data Recorders
SDN: Software Defined Network
RC: Remote Control
UAV: Unmanned Aircraft Vehicle
UE: User Equipment
SIM: Simulated Identity Module
BSs: Base Stations
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
CHAPTER 1
1.0 Introduction
A conspicuous proliferation of Drones/Unmanned Aerial Vehicles (UAVs) have been
experienced in the recent years. Besides the commercial application use like in precision
agriculture where the drones are used for surveying farms during crop spraying and pest
control, they are also being used for military strikes, scientific research, journalism,
environmental protection and border security among other uses. Besides the potential benefits
of the UAVs, there is worry that the UAVs are currently causing many problems. They are
associated with the risk to privacy and safety.
Reports of drones violating public privacy and security of critical facilities including
airports and nuclear plants have become common in the recent times [1]. As reported by [2],
a UAV got cashed intentionally into a nuclear power plant in France in the year 2018.
Moreover, Federal Aviation Administration reports that safety incidents involving UAVs are
exceeding 250 [3]. Commonly, most of these events arise from rogue drones which violates
fly zones restrictions. Additionally, terror groups have also exploited the UAVs for
smuggling explosive devices and chemicals. [4] Reports that two UAVs carrying explosives
got detonated near Venezuela president in an outdoor event. This is a clear indication that
there is an urgent need to protect the national airspace from such unusual threats. This can be
protected by accurately determining the rogue drones through the help of artificial
intelligence.
Various techniques have gotten proposed to mitigate such unconventional problems to
no avail. Conventional radar based approaches which have been widely used in identifying
airplanes have been tried to no avail as it mostly fails to determine drones. Similarly, sound
and video based detection techniques have also been tried without success; these techniques
are recommended for short range instances. Some of these challenges can be addressed by
machine learning approach. In addition to machine learning, part of the analysis is to analyze
all steps of random forest in deciding the right features to identify the pilot, this will enable us
to identify possible enhancement of feature selection by going through each tree and see how
each node or leaf is selected by random forest. By doing this there will be a chance to
discover common behavior between the trees which in return might make it easier to
1.0 Introduction
A conspicuous proliferation of Drones/Unmanned Aerial Vehicles (UAVs) have been
experienced in the recent years. Besides the commercial application use like in precision
agriculture where the drones are used for surveying farms during crop spraying and pest
control, they are also being used for military strikes, scientific research, journalism,
environmental protection and border security among other uses. Besides the potential benefits
of the UAVs, there is worry that the UAVs are currently causing many problems. They are
associated with the risk to privacy and safety.
Reports of drones violating public privacy and security of critical facilities including
airports and nuclear plants have become common in the recent times [1]. As reported by [2],
a UAV got cashed intentionally into a nuclear power plant in France in the year 2018.
Moreover, Federal Aviation Administration reports that safety incidents involving UAVs are
exceeding 250 [3]. Commonly, most of these events arise from rogue drones which violates
fly zones restrictions. Additionally, terror groups have also exploited the UAVs for
smuggling explosive devices and chemicals. [4] Reports that two UAVs carrying explosives
got detonated near Venezuela president in an outdoor event. This is a clear indication that
there is an urgent need to protect the national airspace from such unusual threats. This can be
protected by accurately determining the rogue drones through the help of artificial
intelligence.
Various techniques have gotten proposed to mitigate such unconventional problems to
no avail. Conventional radar based approaches which have been widely used in identifying
airplanes have been tried to no avail as it mostly fails to determine drones. Similarly, sound
and video based detection techniques have also been tried without success; these techniques
are recommended for short range instances. Some of these challenges can be addressed by
machine learning approach. In addition to machine learning, part of the analysis is to analyze
all steps of random forest in deciding the right features to identify the pilot, this will enable us
to identify possible enhancement of feature selection by going through each tree and see how
each node or leaf is selected by random forest. By doing this there will be a chance to
discover common behavior between the trees which in return might make it easier to
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
eliminate part of process selection. This part can be applicable to any datasets (not limited to
our UAV test), which will help in the development and enhancement of many artificial
intelligence applications. This document seek to propose a novel machine learning approach
to determine rogue UAVs in space based on radio waves which are sent by User Equipment
UEs to Base Station BSs.
The Aim of the Project
UAVs are normally flown at high altitudes where the interfering signals may be
strong if not managed properly [5]. It is essential to identify if a drone is legit or not. It is
therefore important to use mobile networks to identify legit and non-legit UAVs. For legit
UAVs, a standard mechanism like a Subscriber Identity Module SIM cards can get enforced
so that the UAVs can be identified by network. Nevertheless, it is very challenging to
determine the drones which are not legitimate i.e. those that are not registered with any
network, an instance which has drawn much attentions as flying unregistered UAV may lead
to excessive interference to networks, and it is not also allowed by policies in certain regions.
This may lead to security and privacy issues like drone aided terror attack and privacy
breaches mentioned earlier [20], [21]. As a result, it is important to detect and determine
these non-legit drones as mentioned earlier. The aim of this paper is to propose a novel
machine learning approach to determine rogue UAVs in space based on radio waves which
are sent by UEs to BSs.
Project Objective
Our primary objective is to develop a robust and highly integrated system which has a
capacity to detect and identify UAVs using machine learning approach.
CHAPTER 2
Related Works
Fundamental technological framework of UAV
The machine learning strategies for detection and identification of the UAVs can be
done without knowing technological framework of the drones. This framework is classified
under three subheadings including navigation, control and communication. This section
presents related works for the above mentioned technological framework of UAVs.
Navigation
Drone navigation involves the process by which the drones make a plan which helps it
to safely arrive at its target destination. Navigation mostly depends on the current
our UAV test), which will help in the development and enhancement of many artificial
intelligence applications. This document seek to propose a novel machine learning approach
to determine rogue UAVs in space based on radio waves which are sent by User Equipment
UEs to Base Station BSs.
The Aim of the Project
UAVs are normally flown at high altitudes where the interfering signals may be
strong if not managed properly [5]. It is essential to identify if a drone is legit or not. It is
therefore important to use mobile networks to identify legit and non-legit UAVs. For legit
UAVs, a standard mechanism like a Subscriber Identity Module SIM cards can get enforced
so that the UAVs can be identified by network. Nevertheless, it is very challenging to
determine the drones which are not legitimate i.e. those that are not registered with any
network, an instance which has drawn much attentions as flying unregistered UAV may lead
to excessive interference to networks, and it is not also allowed by policies in certain regions.
This may lead to security and privacy issues like drone aided terror attack and privacy
breaches mentioned earlier [20], [21]. As a result, it is important to detect and determine
these non-legit drones as mentioned earlier. The aim of this paper is to propose a novel
machine learning approach to determine rogue UAVs in space based on radio waves which
are sent by UEs to BSs.
Project Objective
Our primary objective is to develop a robust and highly integrated system which has a
capacity to detect and identify UAVs using machine learning approach.
CHAPTER 2
Related Works
Fundamental technological framework of UAV
The machine learning strategies for detection and identification of the UAVs can be
done without knowing technological framework of the drones. This framework is classified
under three subheadings including navigation, control and communication. This section
presents related works for the above mentioned technological framework of UAVs.
Navigation
Drone navigation involves the process by which the drones make a plan which helps it
to safely arrive at its target destination. Navigation mostly depends on the current
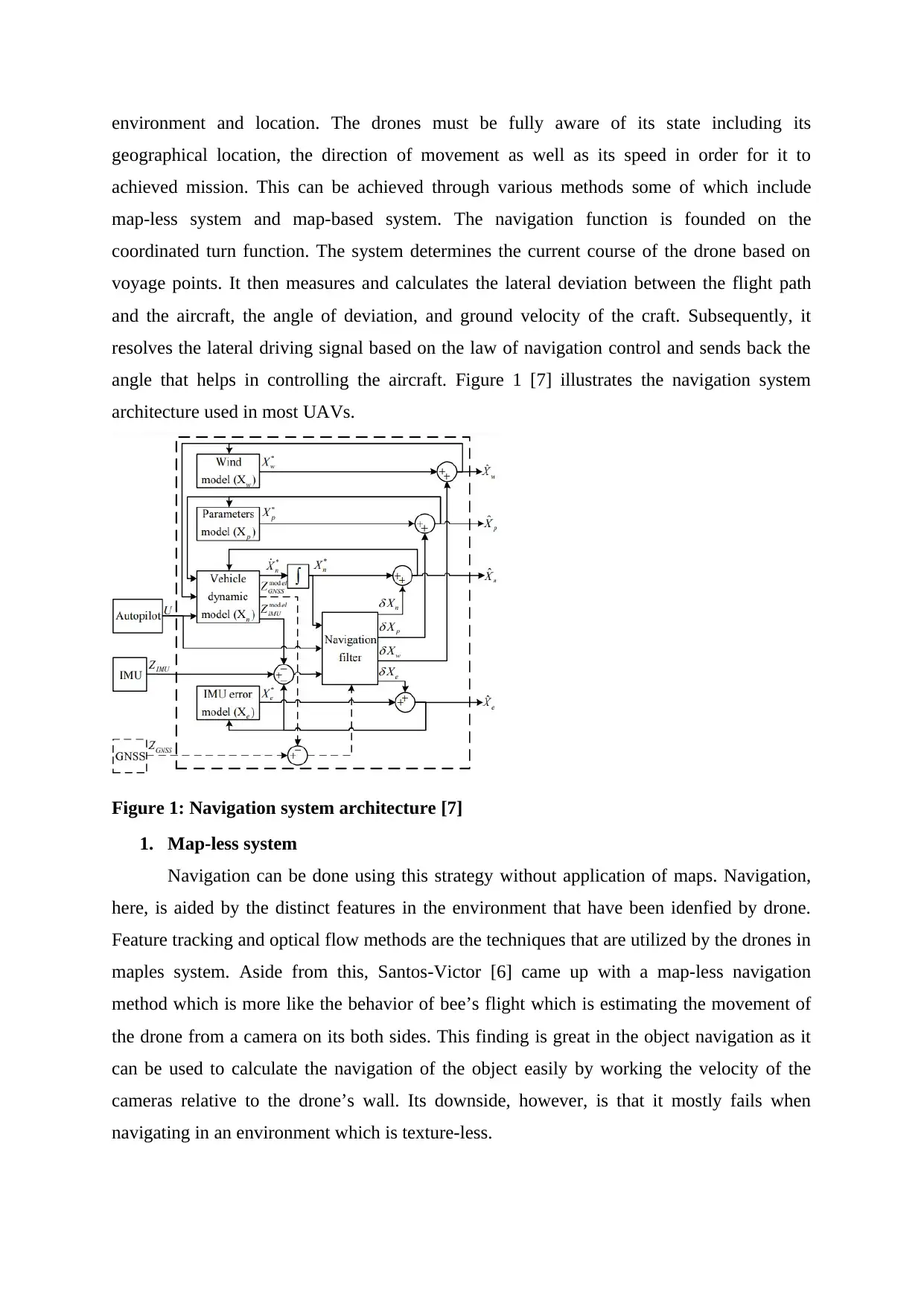
environment and location. The drones must be fully aware of its state including its
geographical location, the direction of movement as well as its speed in order for it to
achieved mission. This can be achieved through various methods some of which include
map-less system and map-based system. The navigation function is founded on the
coordinated turn function. The system determines the current course of the drone based on
voyage points. It then measures and calculates the lateral deviation between the flight path
and the aircraft, the angle of deviation, and ground velocity of the craft. Subsequently, it
resolves the lateral driving signal based on the law of navigation control and sends back the
angle that helps in controlling the aircraft. Figure 1 [7] illustrates the navigation system
architecture used in most UAVs.
Figure 1: Navigation system architecture [7]
1. Map-less system
Navigation can be done using this strategy without application of maps. Navigation,
here, is aided by the distinct features in the environment that have been idenfied by drone.
Feature tracking and optical flow methods are the techniques that are utilized by the drones in
maples system. Aside from this, Santos-Victor [6] came up with a map-less navigation
method which is more like the behavior of bee’s flight which is estimating the movement of
the drone from a camera on its both sides. This finding is great in the object navigation as it
can be used to calculate the navigation of the object easily by working the velocity of the
cameras relative to the drone’s wall. Its downside, however, is that it mostly fails when
navigating in an environment which is texture-less.
geographical location, the direction of movement as well as its speed in order for it to
achieved mission. This can be achieved through various methods some of which include
map-less system and map-based system. The navigation function is founded on the
coordinated turn function. The system determines the current course of the drone based on
voyage points. It then measures and calculates the lateral deviation between the flight path
and the aircraft, the angle of deviation, and ground velocity of the craft. Subsequently, it
resolves the lateral driving signal based on the law of navigation control and sends back the
angle that helps in controlling the aircraft. Figure 1 [7] illustrates the navigation system
architecture used in most UAVs.
Figure 1: Navigation system architecture [7]
1. Map-less system
Navigation can be done using this strategy without application of maps. Navigation,
here, is aided by the distinct features in the environment that have been idenfied by drone.
Feature tracking and optical flow methods are the techniques that are utilized by the drones in
maples system. Aside from this, Santos-Victor [6] came up with a map-less navigation
method which is more like the behavior of bee’s flight which is estimating the movement of
the drone from a camera on its both sides. This finding is great in the object navigation as it
can be used to calculate the navigation of the object easily by working the velocity of the
cameras relative to the drone’s wall. Its downside, however, is that it mostly fails when
navigating in an environment which is texture-less.
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
1 out of 32


Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Unlock your academic potential
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.