University of Wollongong: Intelligent Mobile Robot Control Project
VerifiedAdded on 2023/06/13
|15
|1928
|398
Project
AI Summary
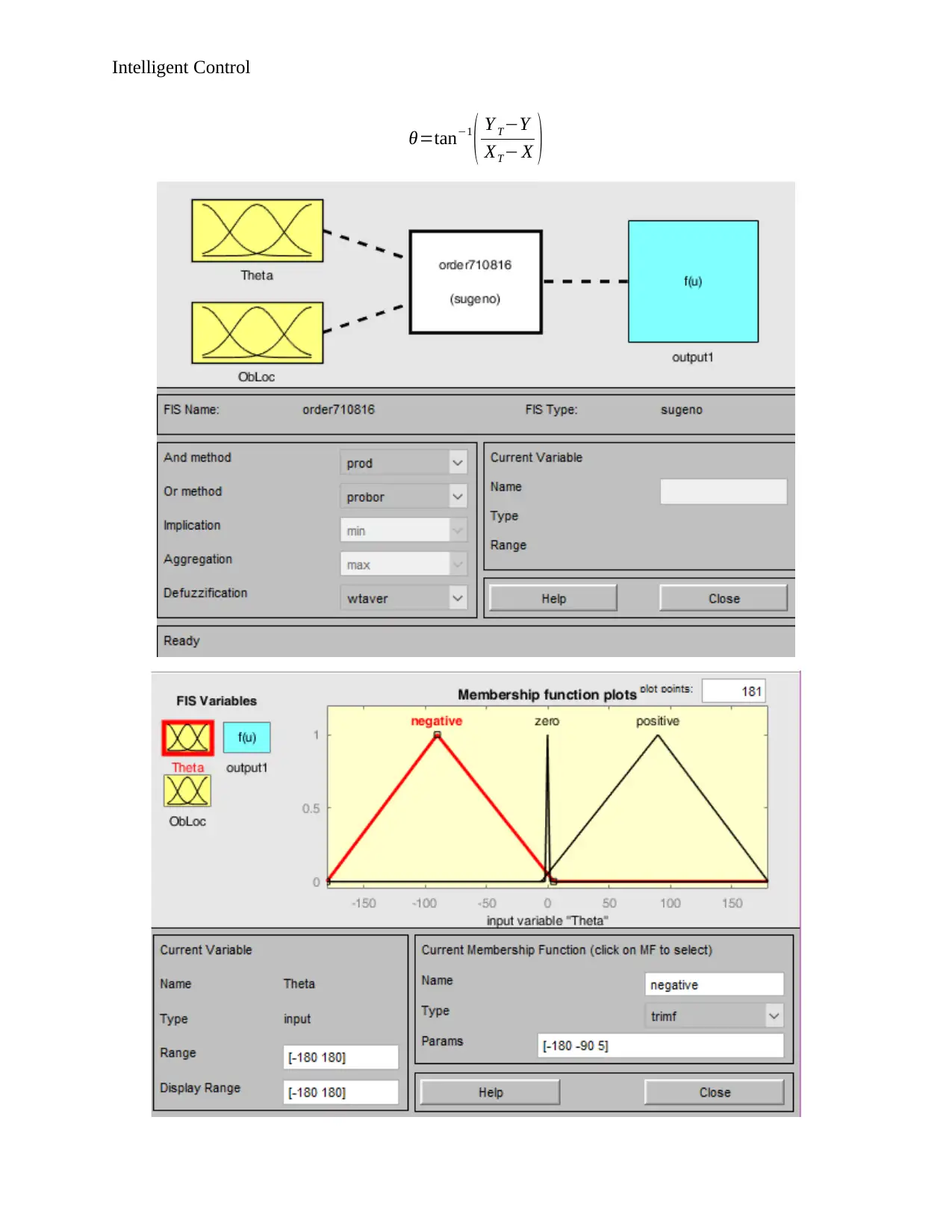
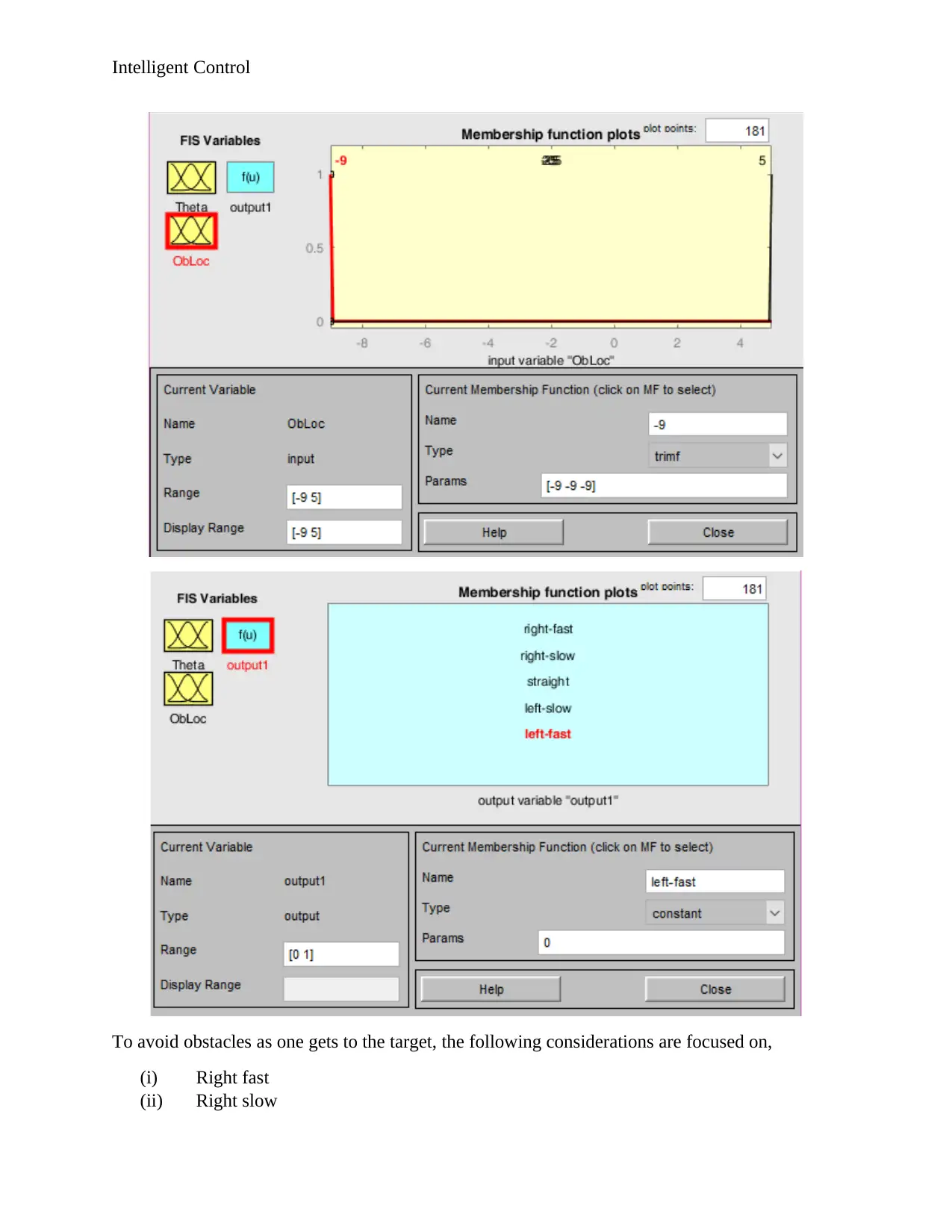
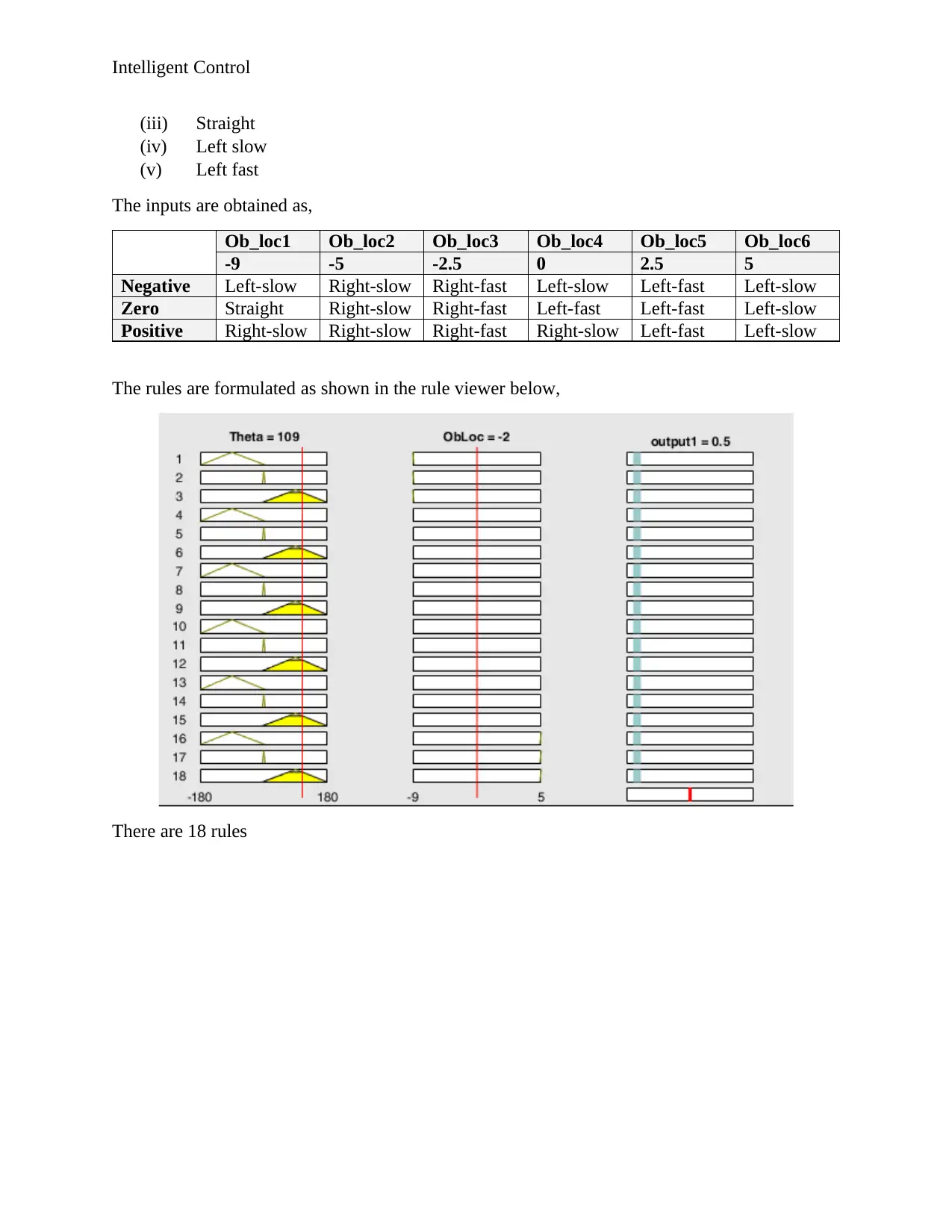
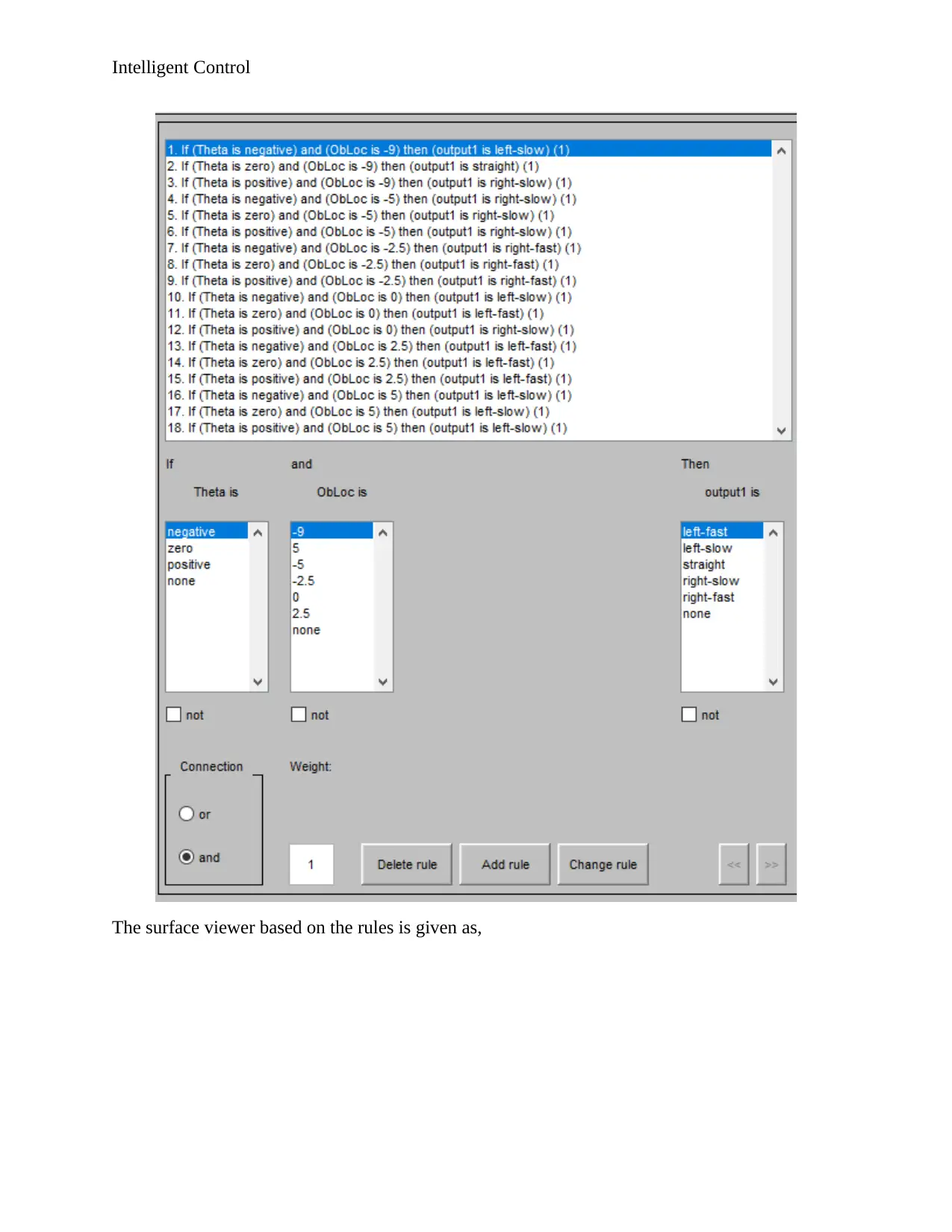
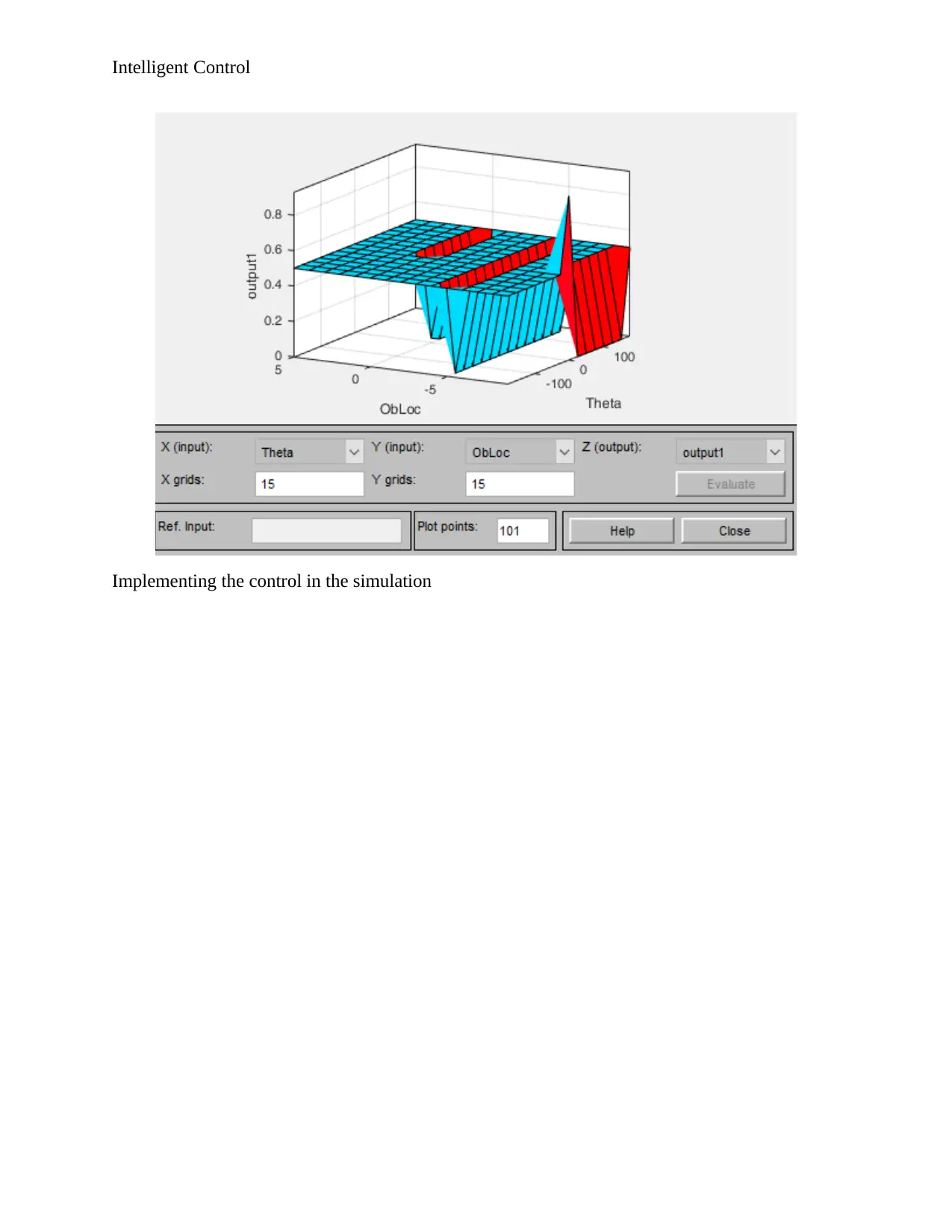
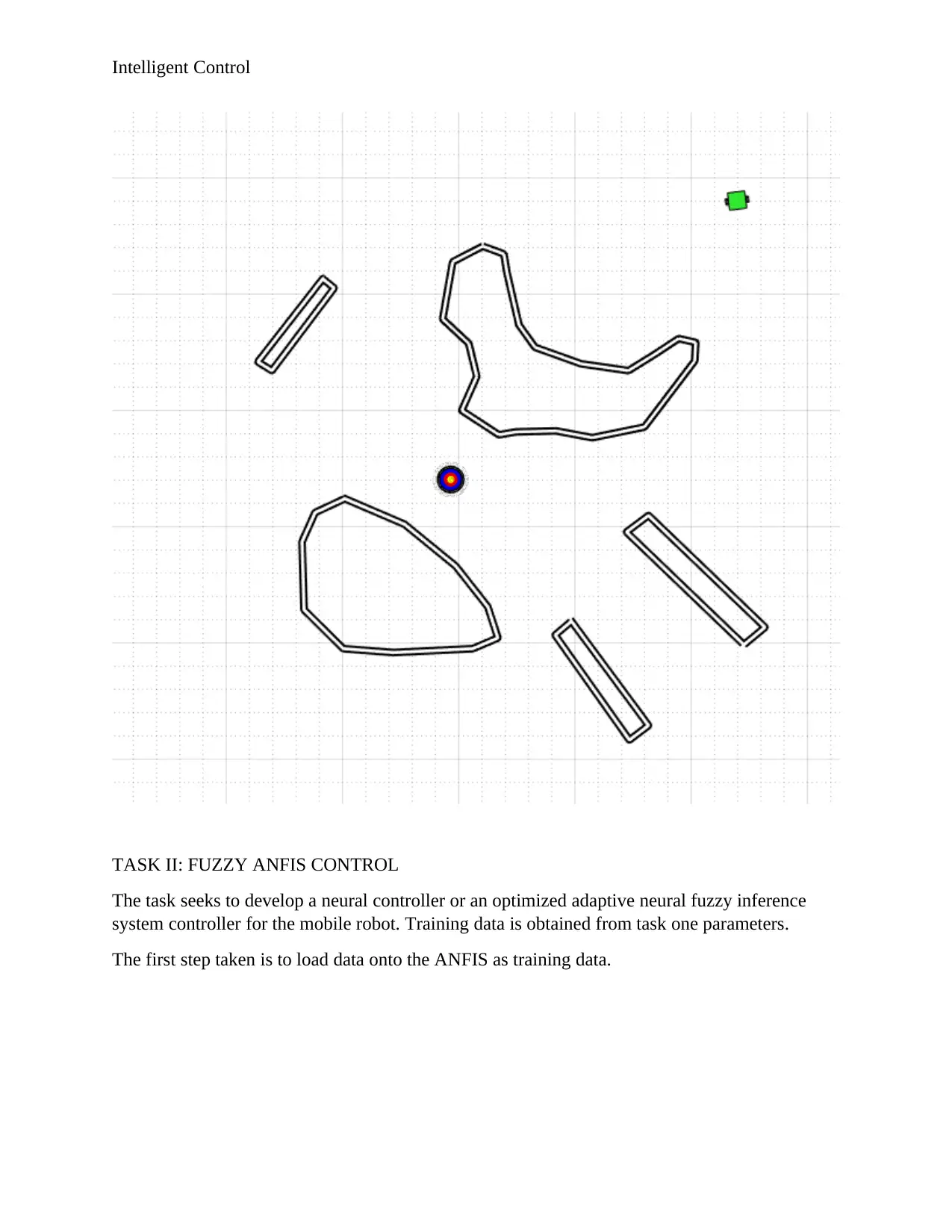
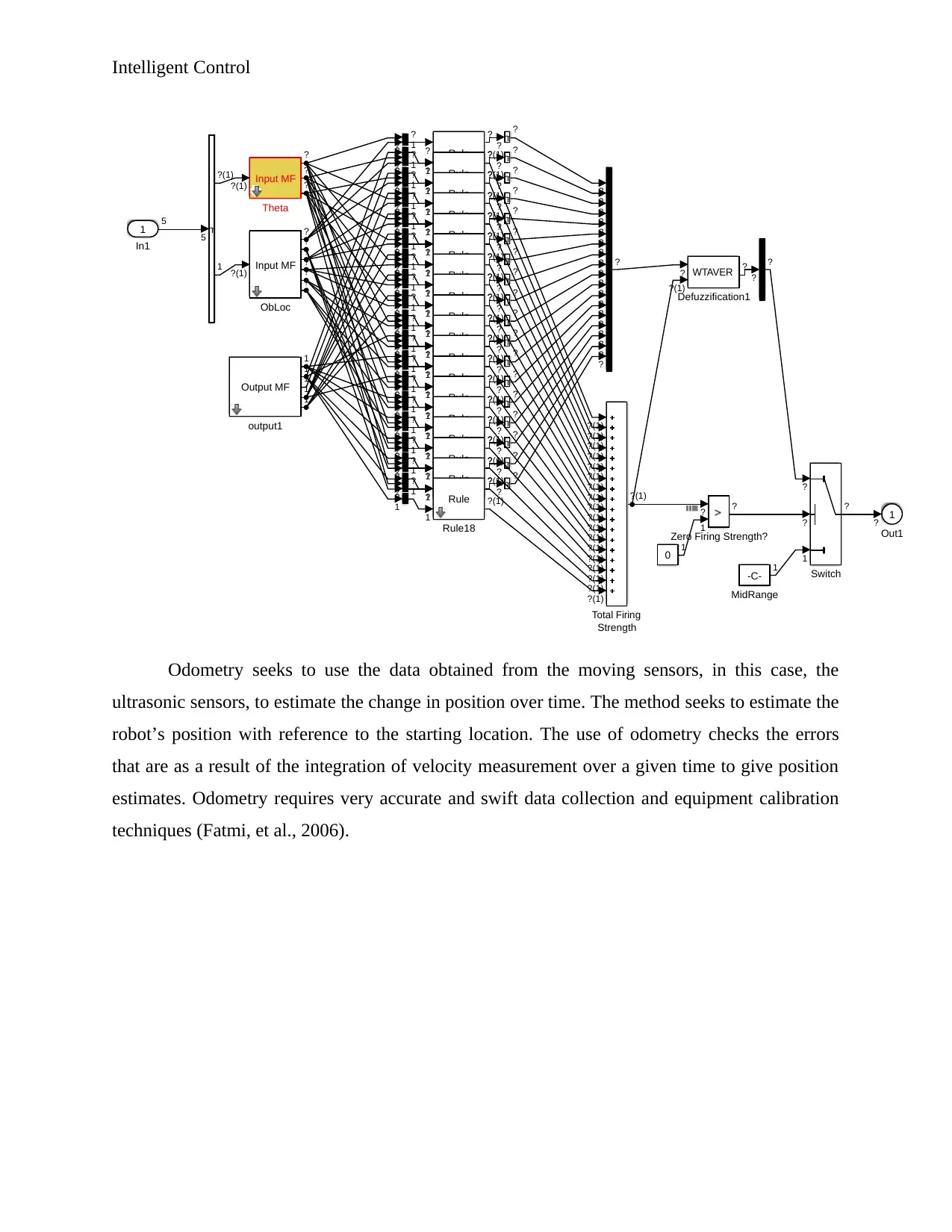
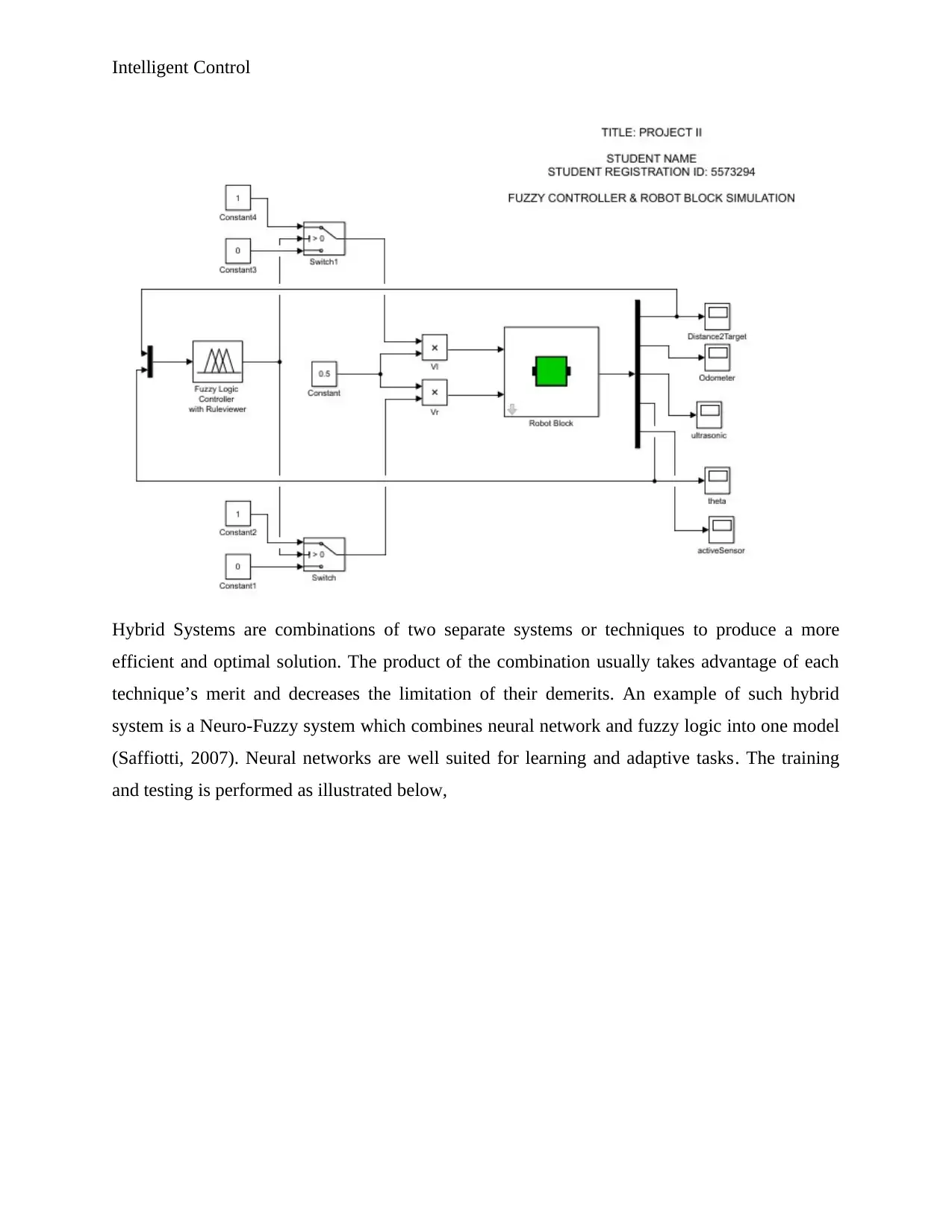
This project focuses on the intelligent control of a mobile robot using fuzzy logic and Adaptive Neuro-Fuzzy Inference System (ANFIS). The primary objective is to design a fuzzy controller for trajectory tracking and obstacle avoidance, utilizing sensor data. The methodology involves MATLAB simulations using the Fuzzy Logic Toolbox, kinematic models, and trajectory tracking models with a MIMO fuzzy controller. The project details the fuzzification, inference, and defuzzification processes, along with the development of fuzzy rules for robot navigation. Additionally, the project explores the implementation of an ANFIS controller, training it with data from the fuzzy controller to optimize the robot's trajectory. The use of odometry and hybrid systems, such as Neuro-Fuzzy systems, is also discussed to enhance the robot's performance. This project showcases the application of intelligent control techniques in mobile robotics and is available on Desklib, where students can find more solved assignments and study resources.
1 out of 15

Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.