CIVE2560: Engineering Maths and Modelling - Spring-Mass-Damper System
VerifiedAdded on 2023/04/20
|50
|9794
|479
Report
AI Summary
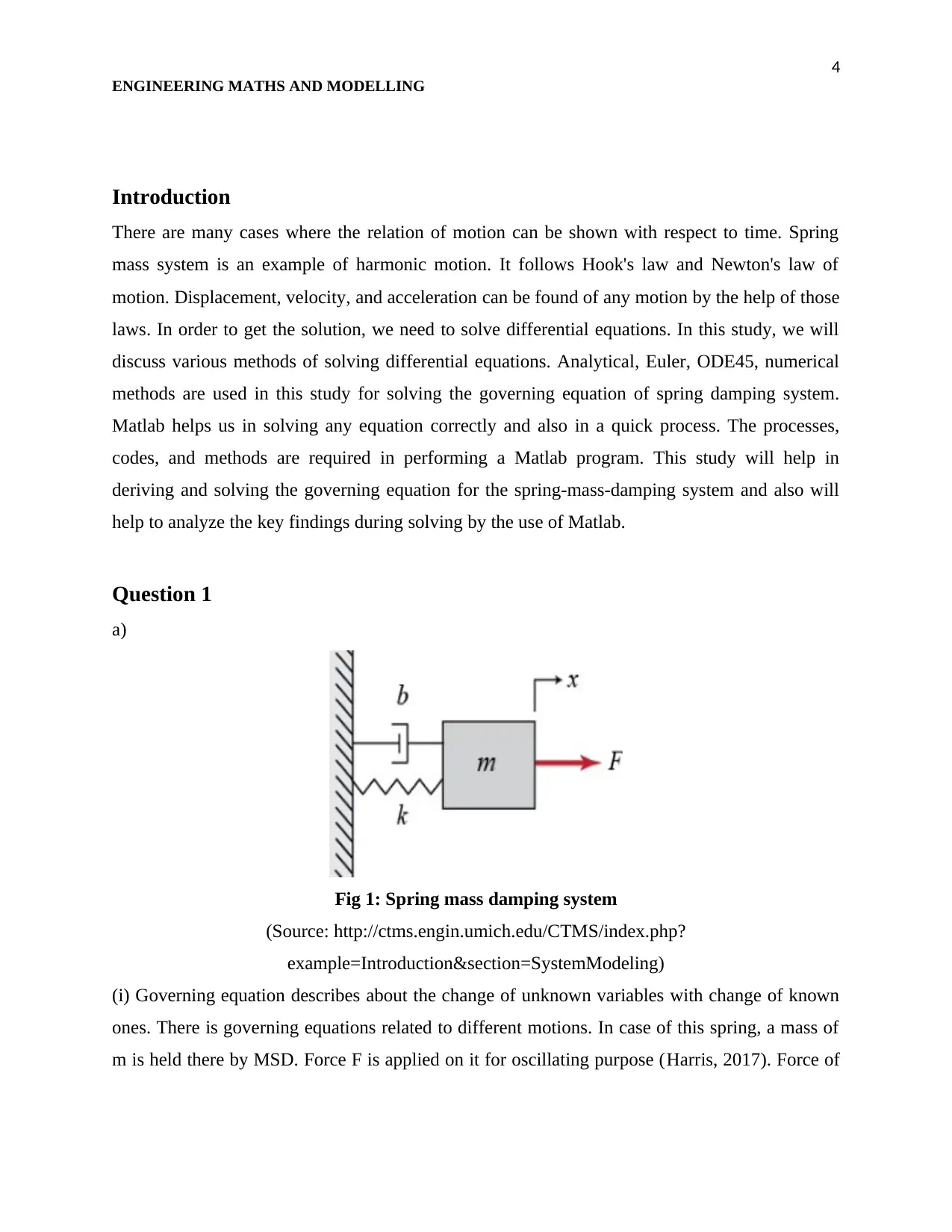
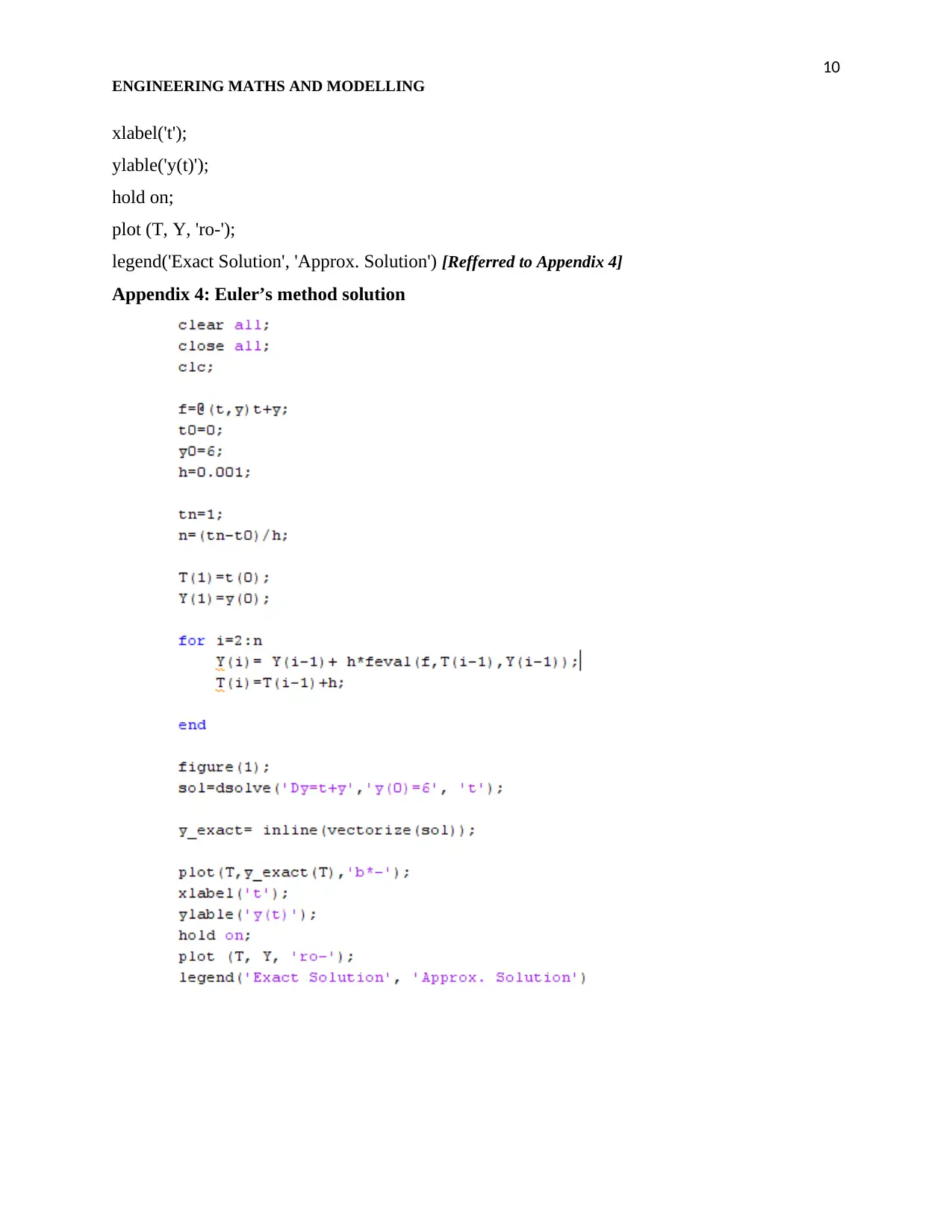
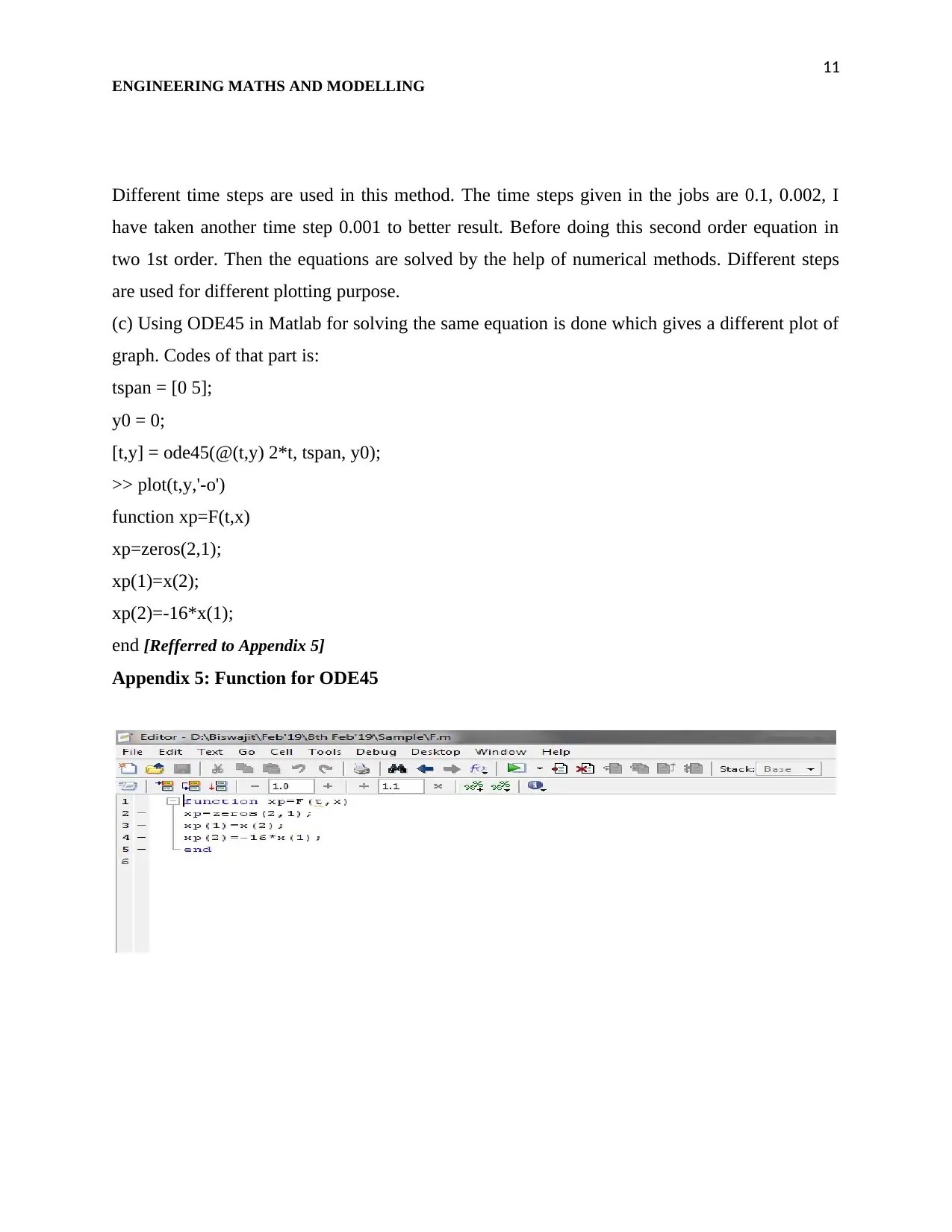
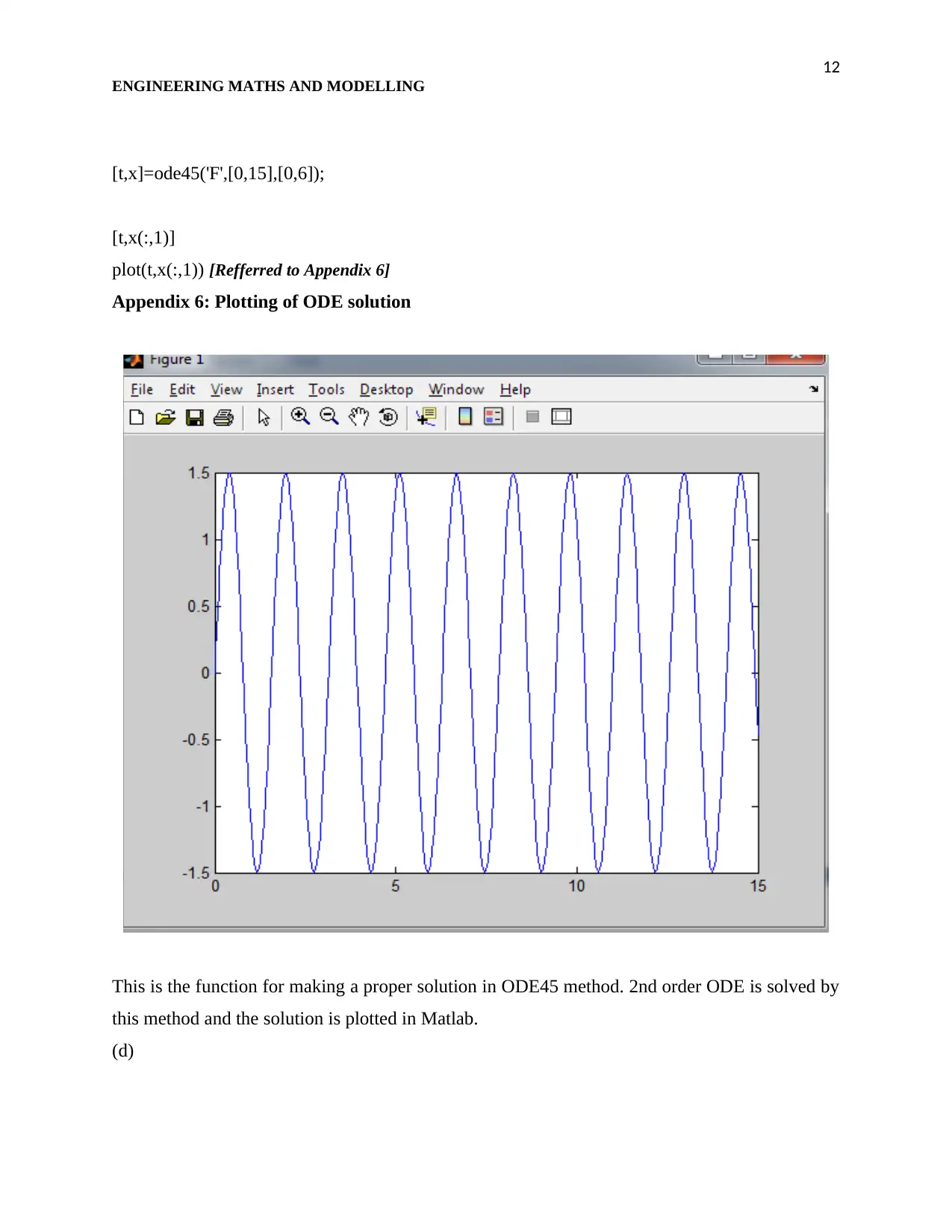
This report provides a comprehensive analysis of a spring-mass-damper (MSD) system, a fundamental concept in engineering, particularly relevant to civil engineering applications. The study begins with deriving the governing equations of motion, which are then solved using both analytical and numerical methods, including Euler's method and the ODE45 solver in Matlab. The report investigates the impact of various parameters, such as mass, spring constant, and damping coefficients, on the system's behavior, including displacement, velocity, and acceleration. Key findings are presented, highlighting the effects of different initial conditions and the influence of damping on the harmonic motion of the system. The report also includes Matlab code and plots, demonstrating the practical application of these methods. By comparing the results obtained from different approaches, the study offers insights into the accuracy and efficiency of each method. The analysis extends to the effects of damping, changing the initial conditions, and varying mass and spring constants on the solution. This coursework consolidates the knowledge of differential equations and their application in modeling and investigating the behavior of vibrating systems, ultimately providing a foundation for understanding more complex multi-component systems, like real-world structures, through the extension of MSD approaches.

1 out of 50
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.