Temperature Evolution in 1D Heat Conduction
VerifiedAdded on 2020/04/29
|8
|1467
|102
AI Summary
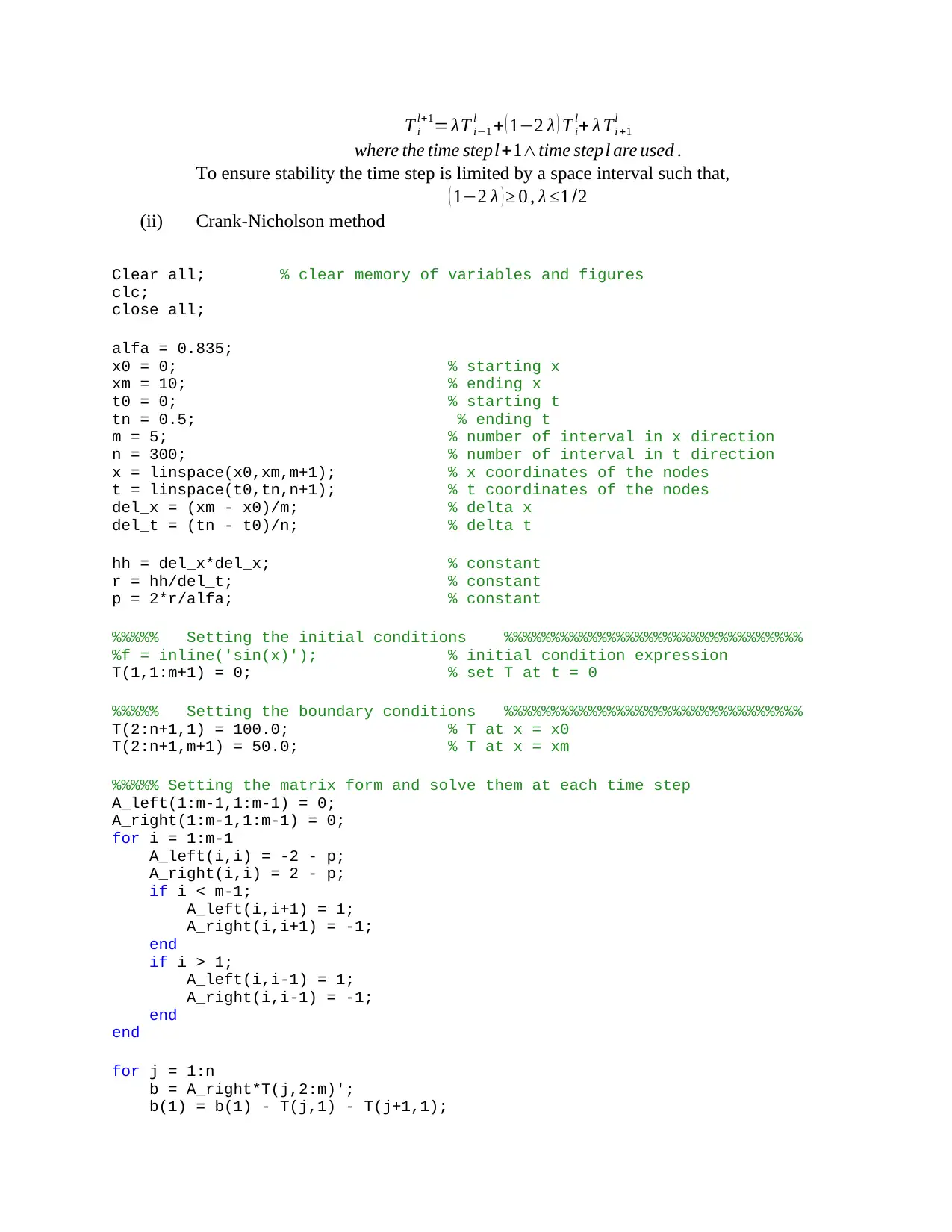
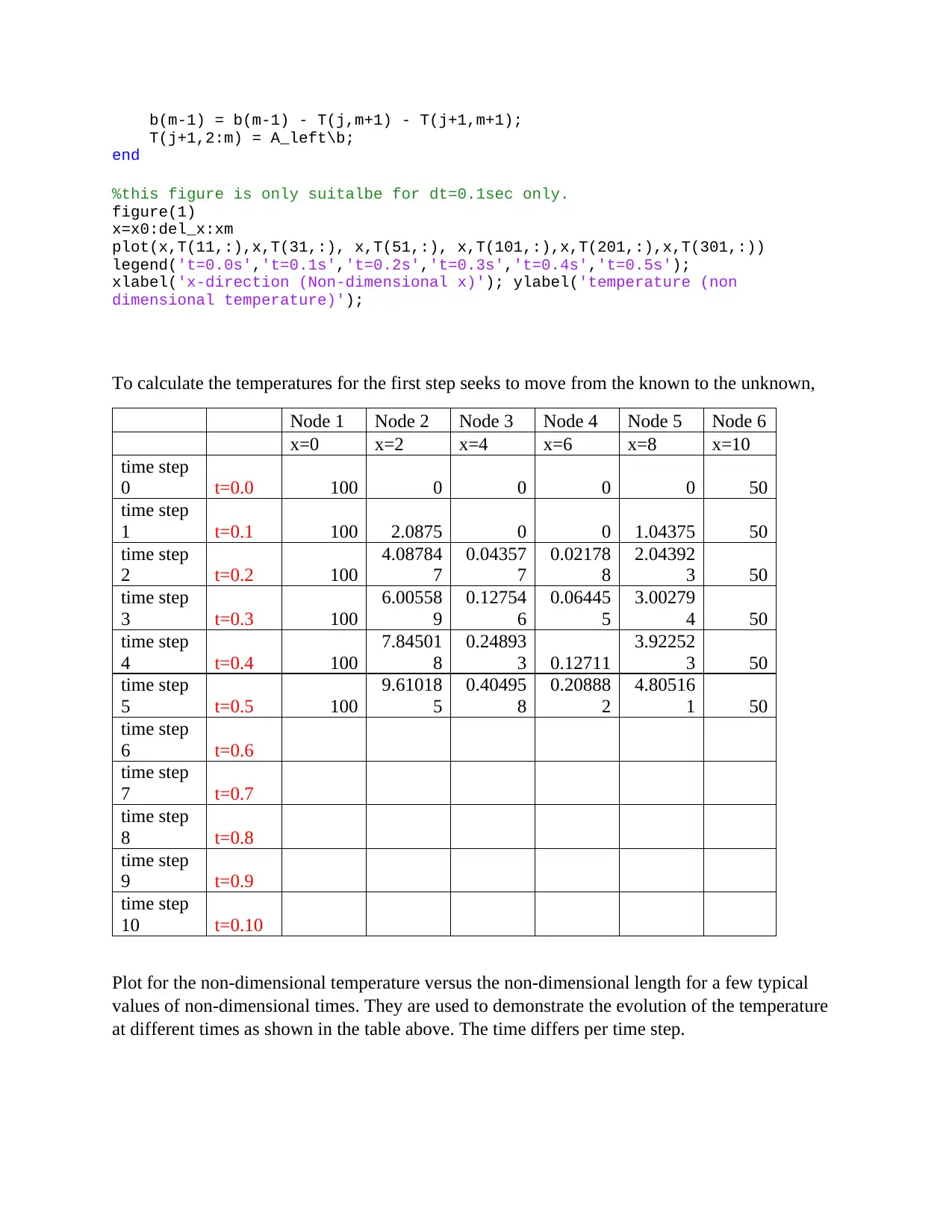
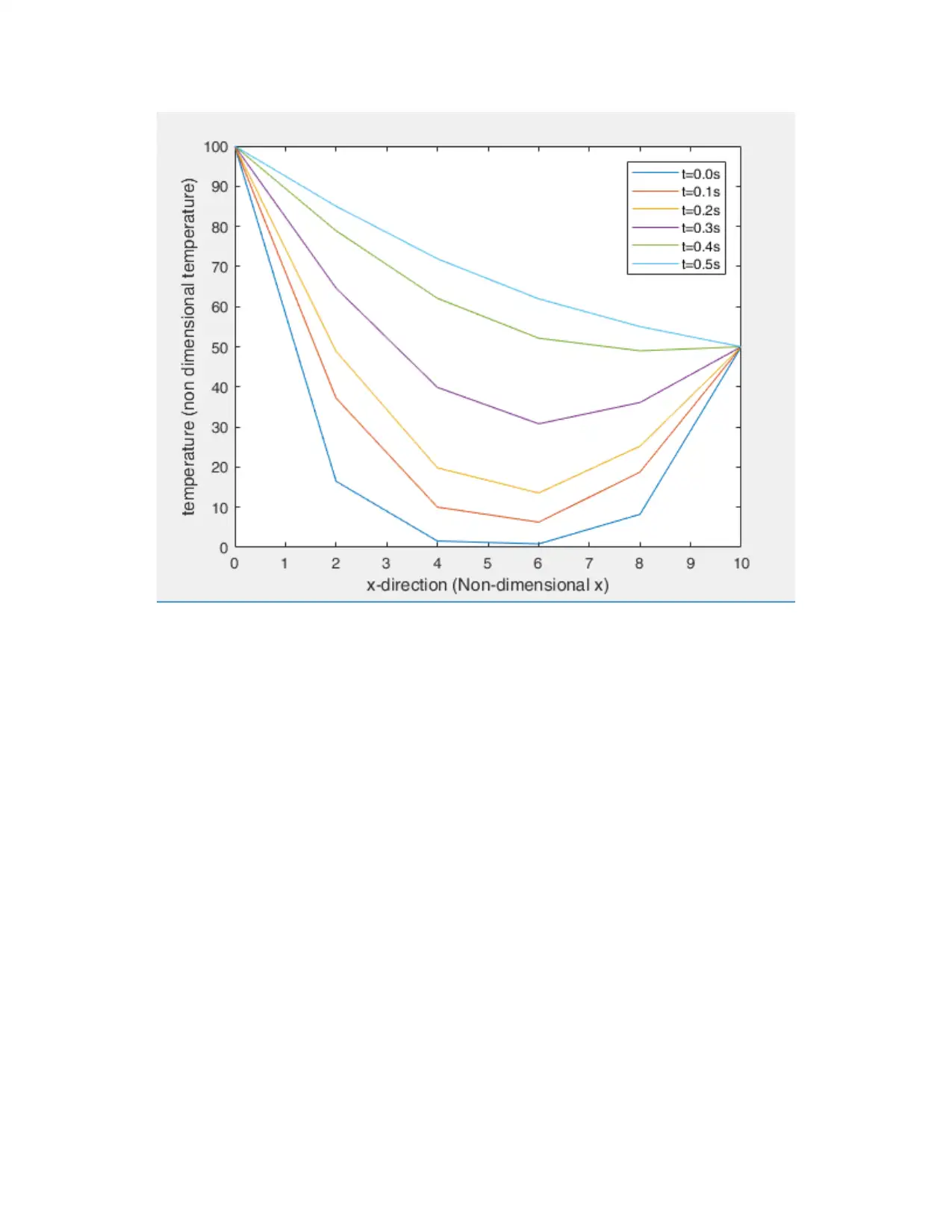
This assignment involves simulating the behavior of temperature in a one-dimensional heat conduction scenario. The provided data outlines time steps and corresponding non-dimensional temperatures at various points along the length (x) of the system. Students are tasked with plotting these temperature distributions for several time steps to visualize how the temperature evolves over time. The analysis requires understanding and interpreting the non-dimensional temperature profiles.
Contribute Materials
Your contribution can guide someone’s learning journey. Share your
documents today.

1 out of 8




Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
© 2024 | Zucol Services PVT LTD | All rights reserved.