DEN4123 MATLAB Assignment: System Stability using Hurwitz Matrix
VerifiedAdded on 2023/04/08
|15
|1847
|118
Practical Assignment
AI Summary
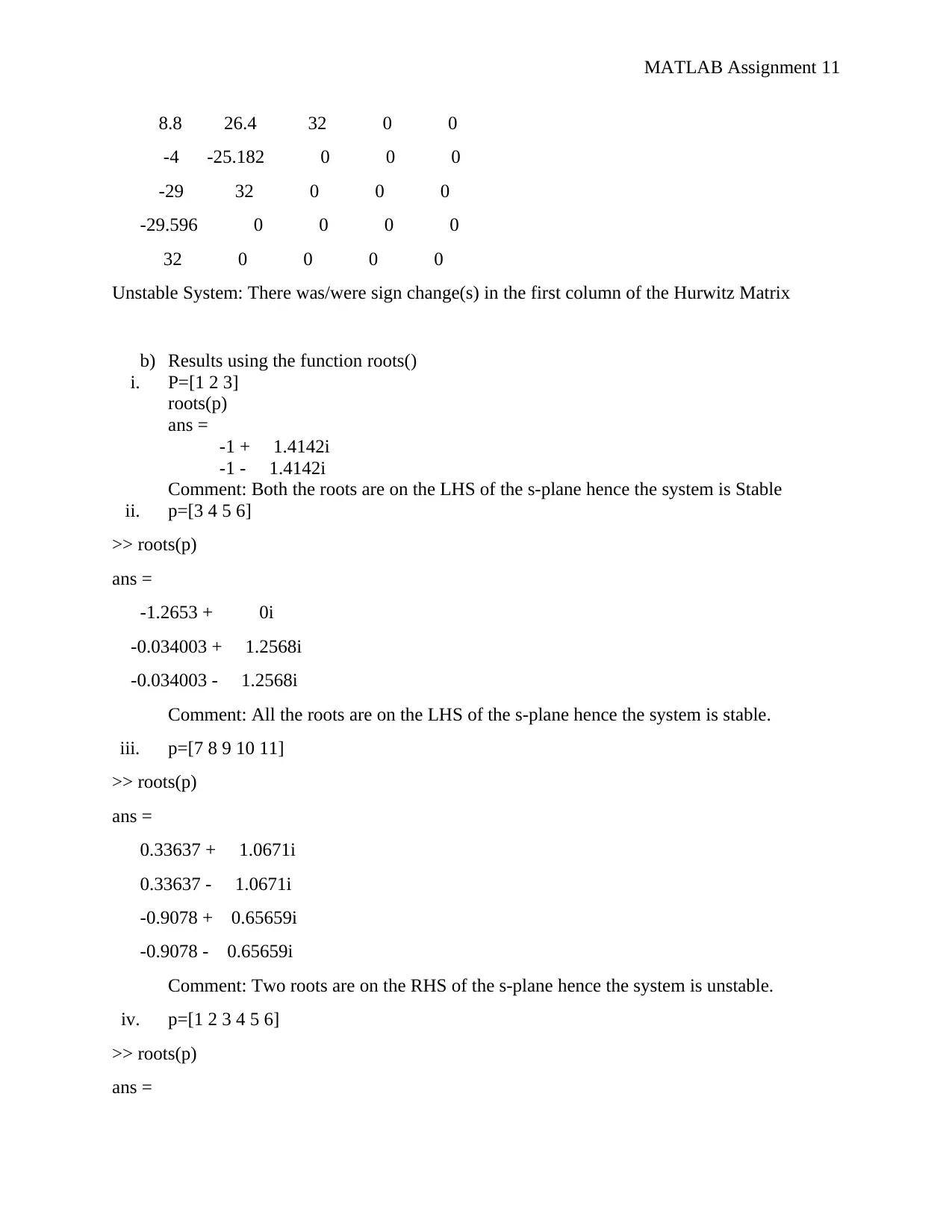
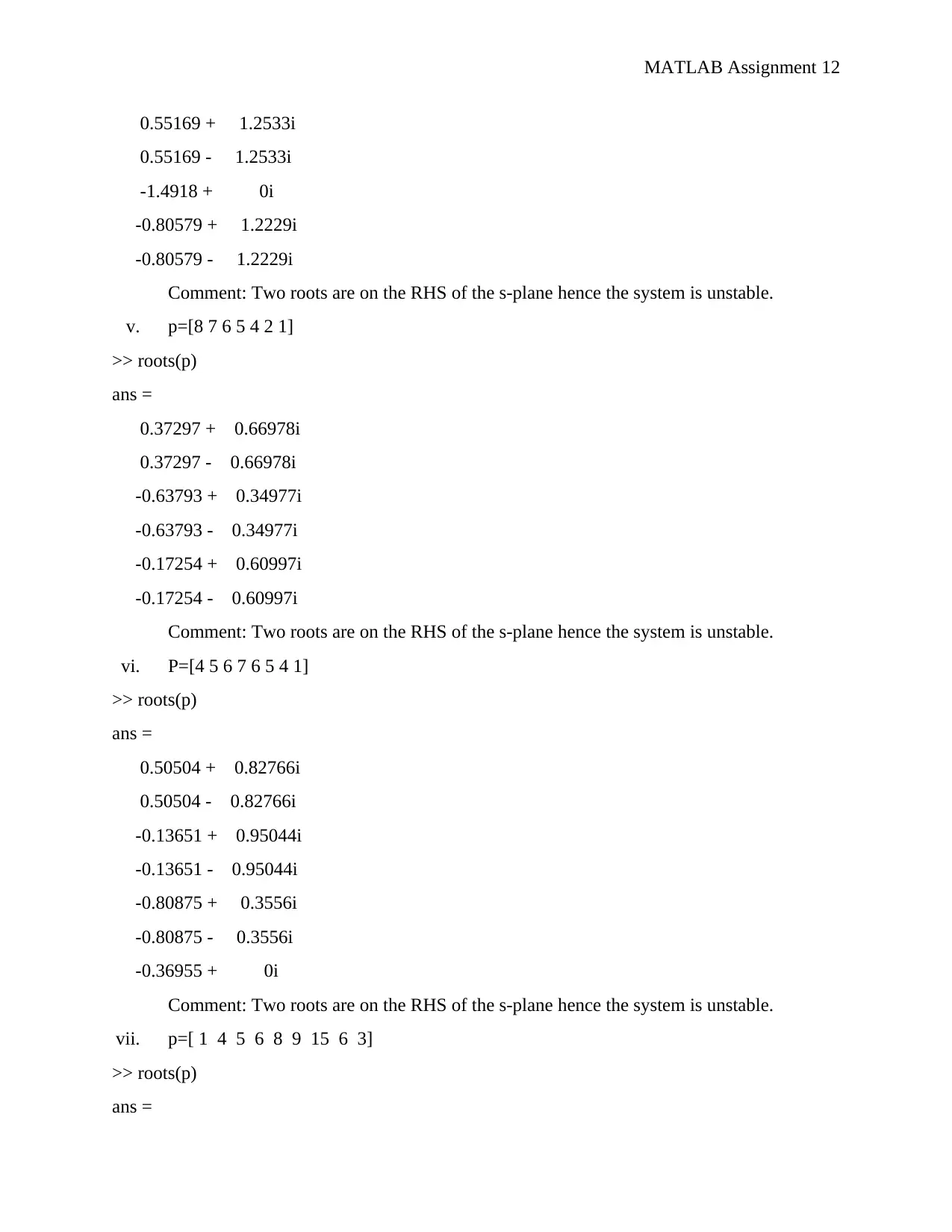
This MATLAB assignment focuses on determining the stability of closed-loop systems using the Hurwitz matrix method and Routh's stability criterion. The solution involves creating several MATLAB functions: `AllNonZero()`, `AllSameSign()`, `HurwitzMatrix()`, and `IsStable()`. The `AllNonZero()` and `AllSameSign()` functions validate the characteristic equation, while `HurwitzMatrix()` generates the Hurwitz matrix. The `IsStable()` function then assesses stability by checking for sign changes in the first column of the Hurwitz matrix. The assignment includes testing these functions with various polynomials and comparing the results with the `roots()` function to confirm the accuracy of the stability analysis. The functions successfully determine system stability based on the Routh-Hurwitz criterion, as validated by the roots of the characteristic equations.










1 out of 15
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.