Software Engineering: Oral-B 5000 Toothbrush State Transition Diagram
VerifiedAdded on 2023/01/23
|9
|1407
|52
Project
AI Summary
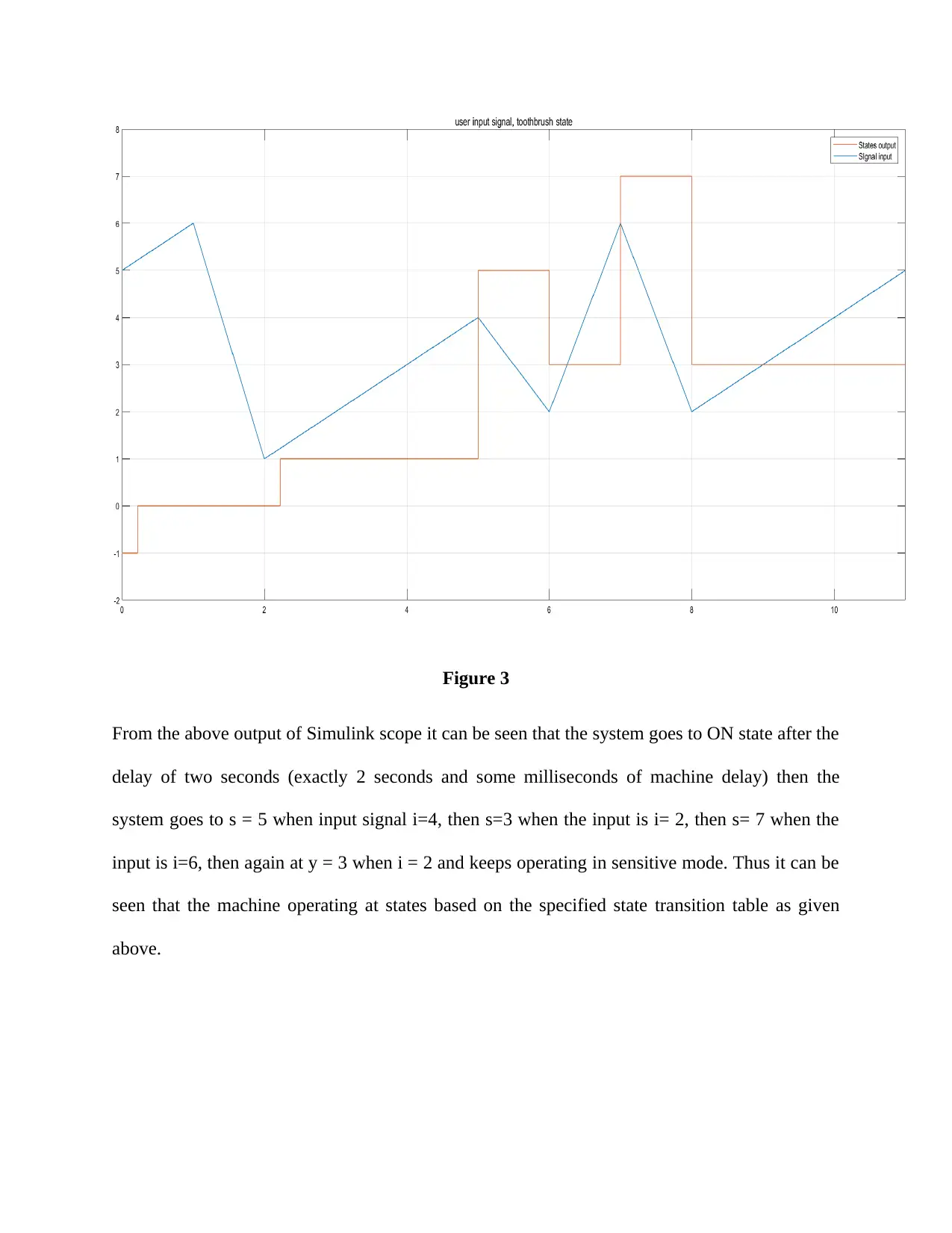
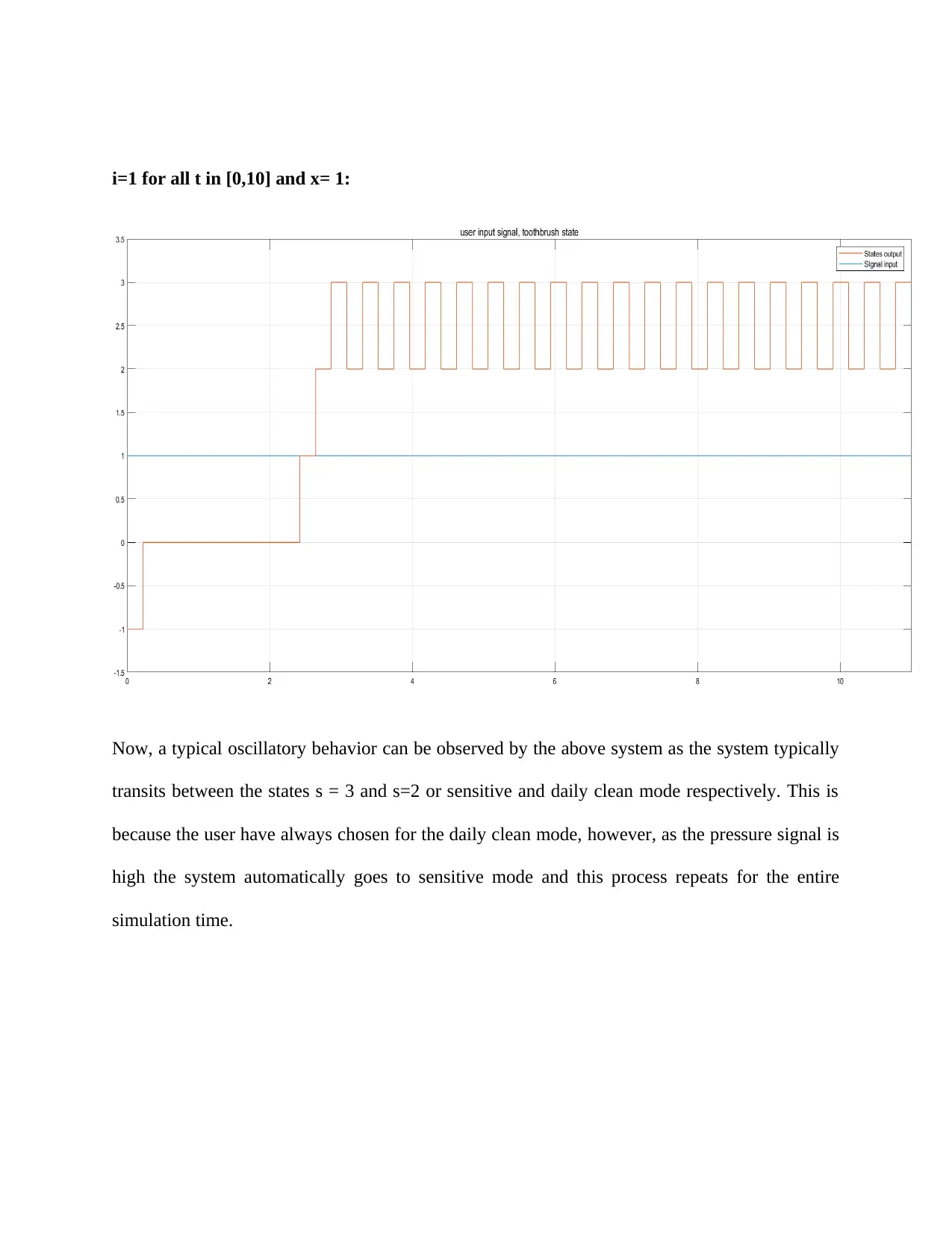
This assignment presents a state transition diagram for the Braun 5000 Oral-B electric toothbrush, developed using MATLAB's Simulink environment. The project models the toothbrush's various brushing modes (Daily clean, Deep clean, Massage, Sensitive, Whitening, and Tongue Cleaning) as states within a state chart. The diagram incorporates user input signals, pressure sensor data, and the SmartGuide interface to simulate the toothbrush's operation. The solution includes a detailed state table, a Simulink block diagram, and testing results demonstrating the system's transitions between states based on input signals and pressure levels. The assignment analyzes the toothbrush's functionalities, including charging, timer modes, and the influence of pressure on brushing mode selection, and provides a conclusion that the logic and signals required to make the transitions are same for the actual toothbrush to the state model in Simulink.

1 out of 9
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.