OpenHAWK: Object-Oriented Design of a UAV Controller System
VerifiedAdded on 2019/09/16
|6
|2436
|263
Project
AI Summary
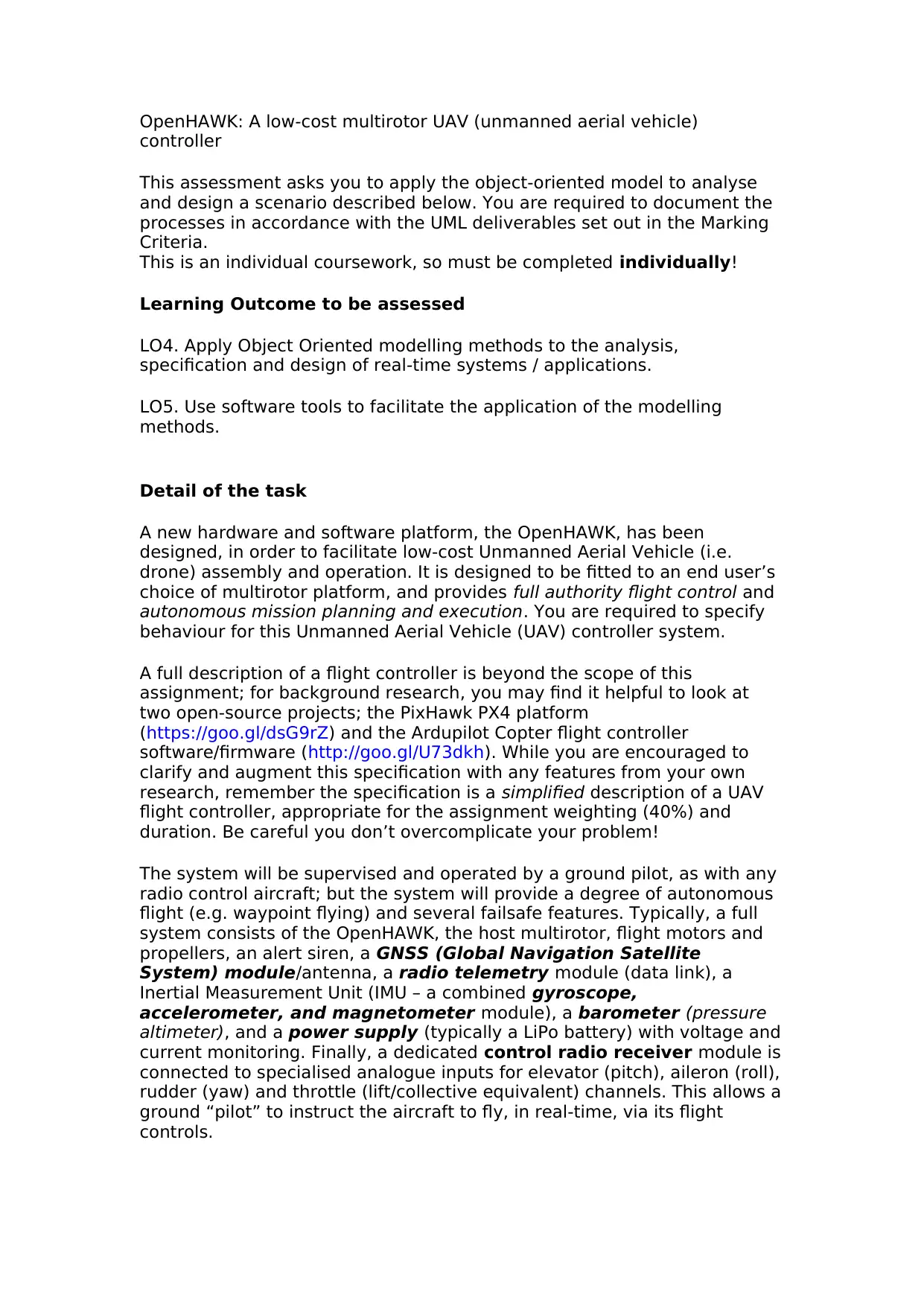
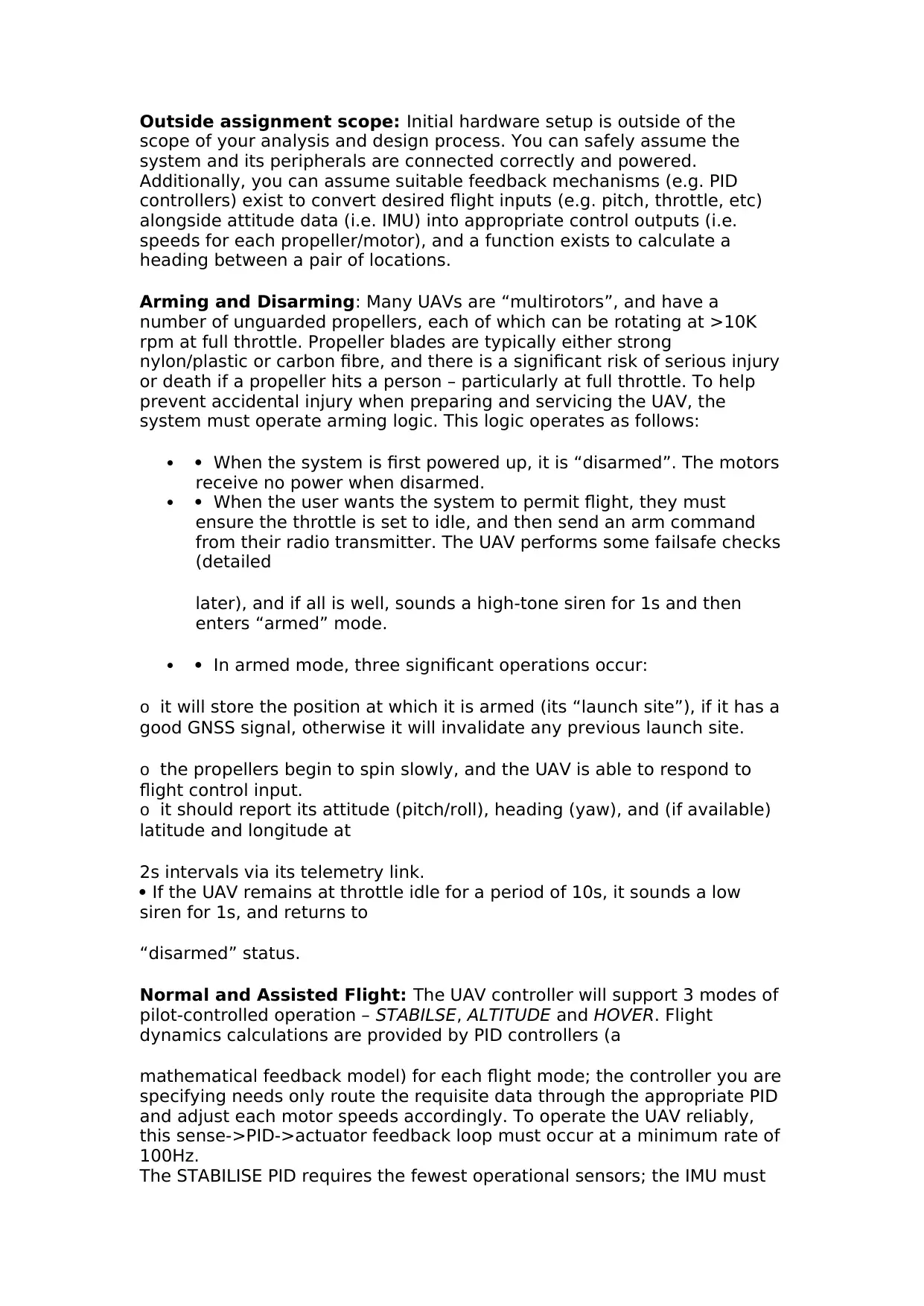
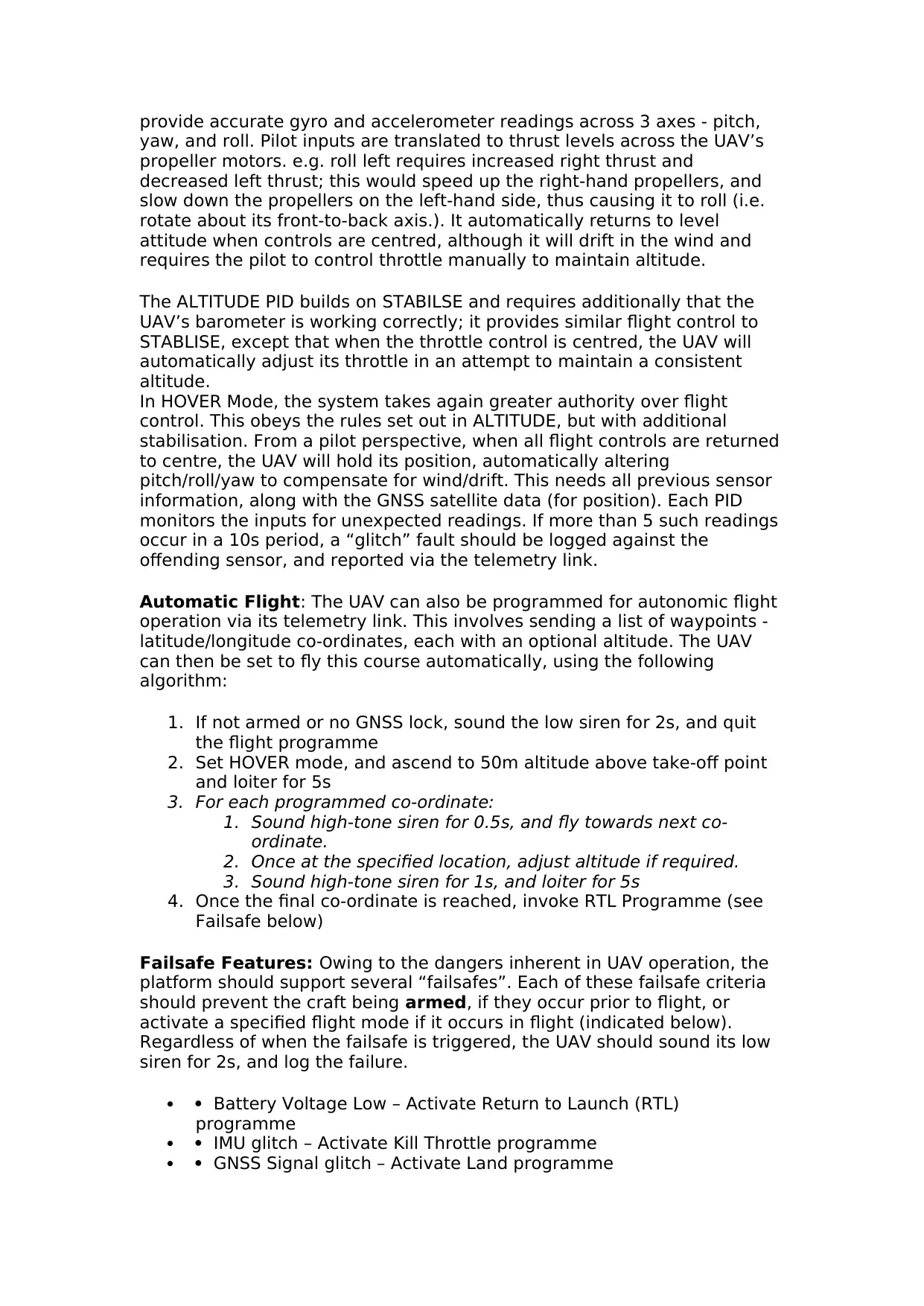
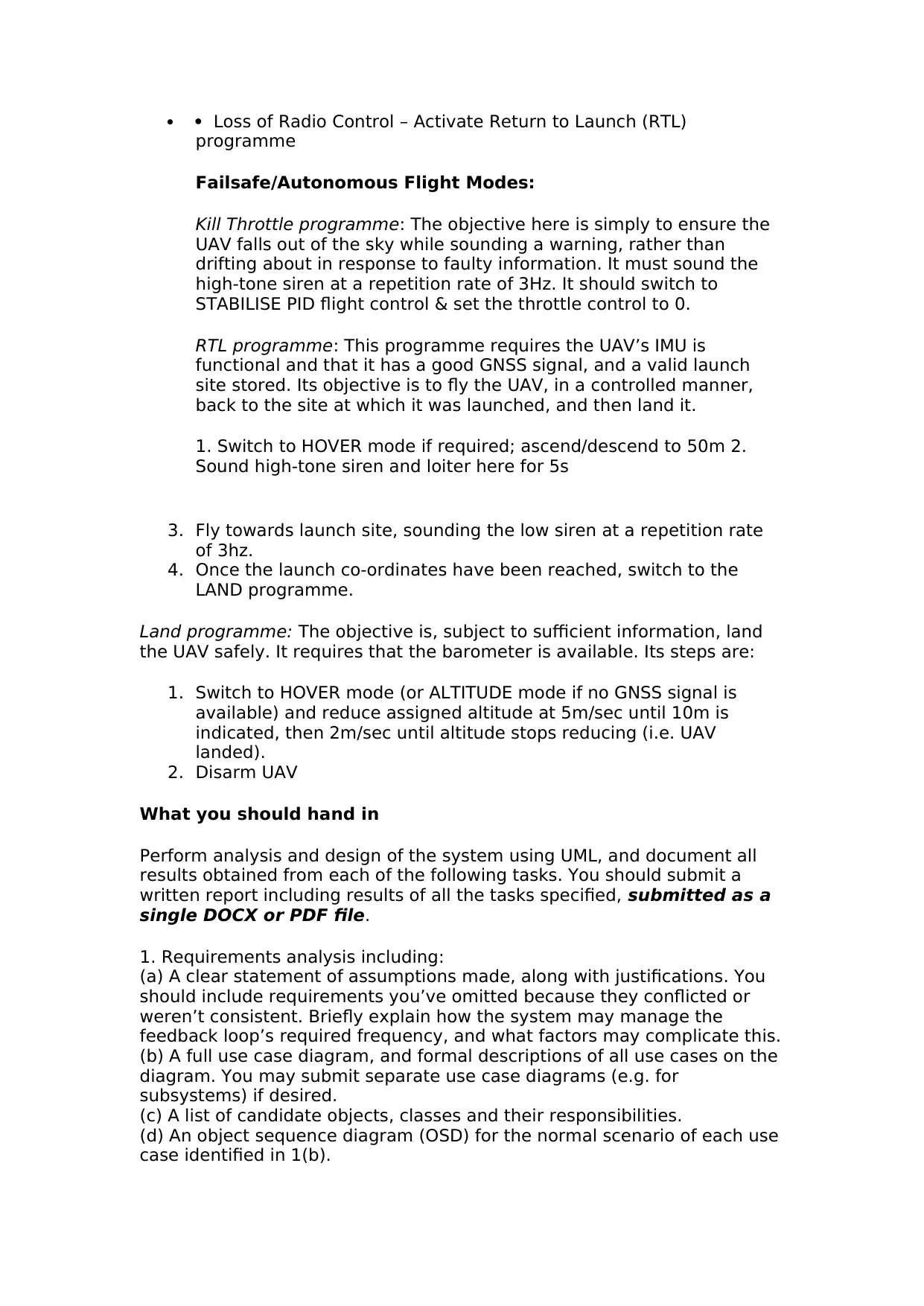
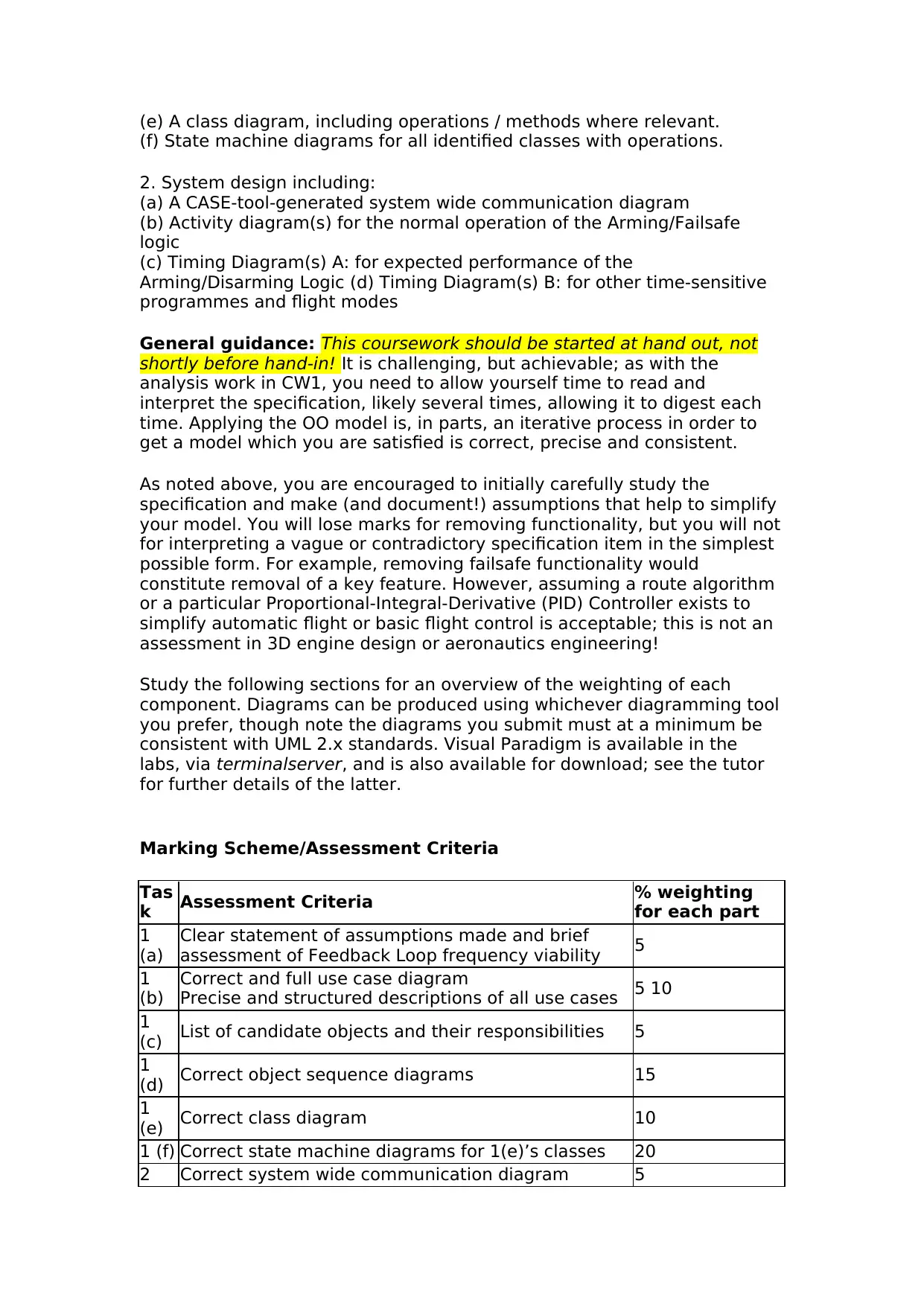
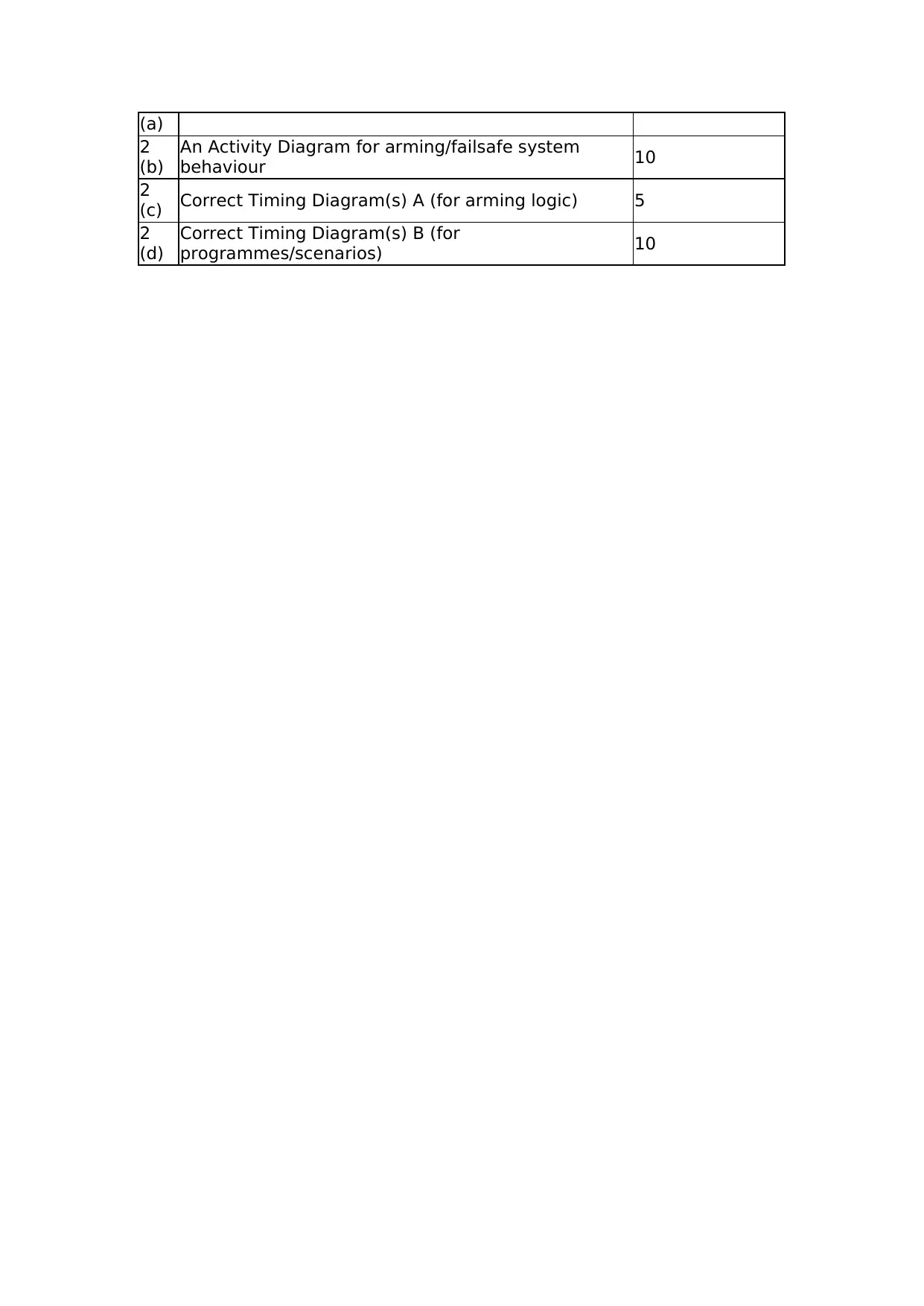
This project focuses on the design and analysis of the OpenHAWK, a low-cost multirotor UAV controller, using object-oriented modeling techniques and UML diagrams. The assignment requires students to specify the behavior of the UAV controller, which includes arming and disarming logic, various flight modes (STABILISE, ALTITUDE, HOVER), autonomous flight capabilities with waypoint navigation, and several failsafe features like Return to Launch (RTL), Kill Throttle, and Land programs. Students are tasked with performing requirements analysis, creating use case diagrams, identifying candidate objects and classes, developing object sequence diagrams, constructing class diagrams, and designing state machine diagrams. Furthermore, the project involves system design, including communication diagrams, activity diagrams for arming and failsafe logic, and timing diagrams for performance analysis. The goal is to apply object-oriented modeling to analyze, specify, and design a real-time system, demonstrating the use of software tools to facilitate the modeling methods. The solution includes a detailed report with UML deliverables as per the marking criteria, encompassing various aspects of the UAV controller's functionality and failsafe mechanisms.
1 out of 6
Related Documents




Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2025 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.