Static Engineering System Task 1: Electrical Circuit and Beam Analysis
VerifiedAdded on 2019/12/18
|32
|3416
|392
Homework Assignment
AI Summary
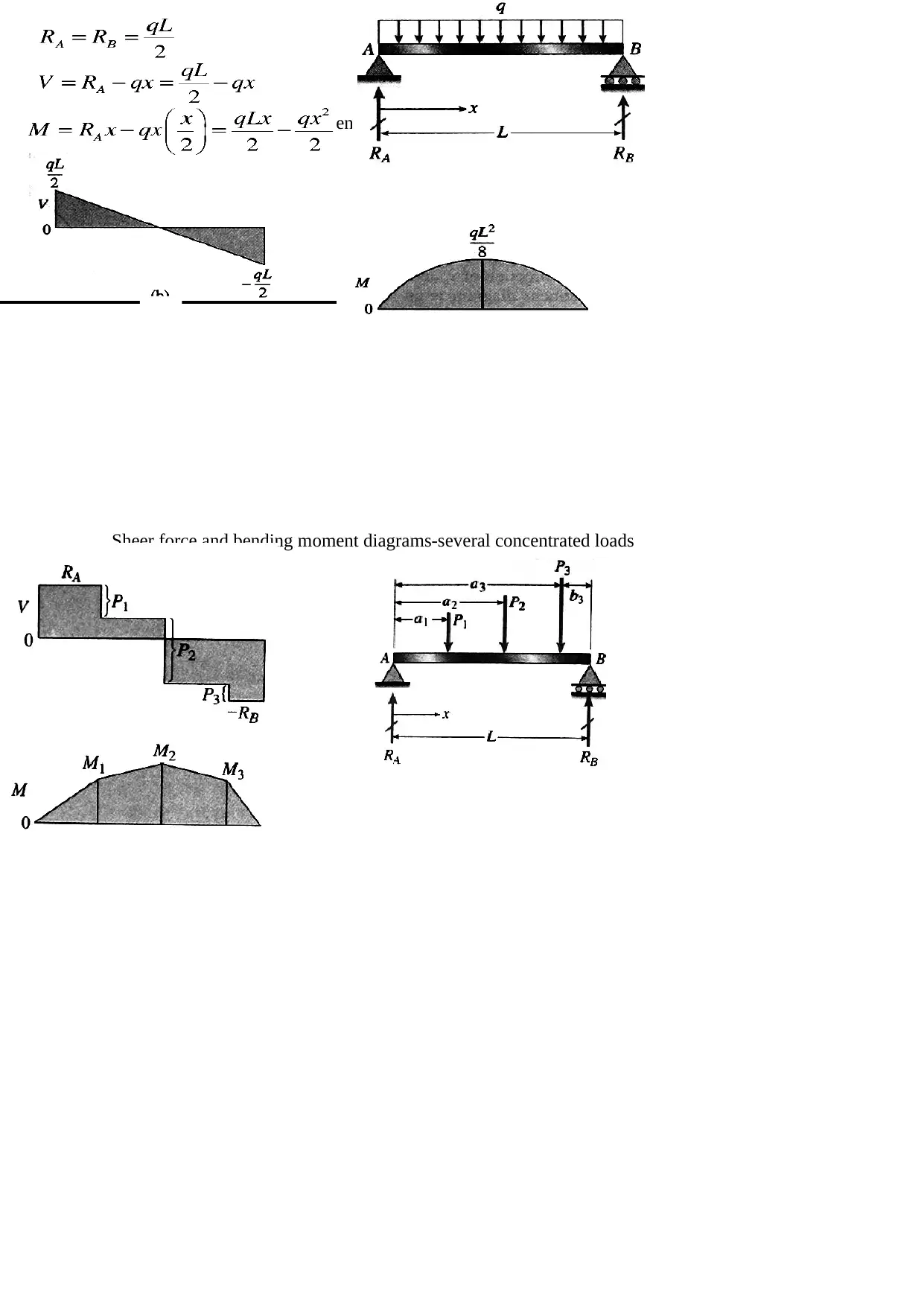
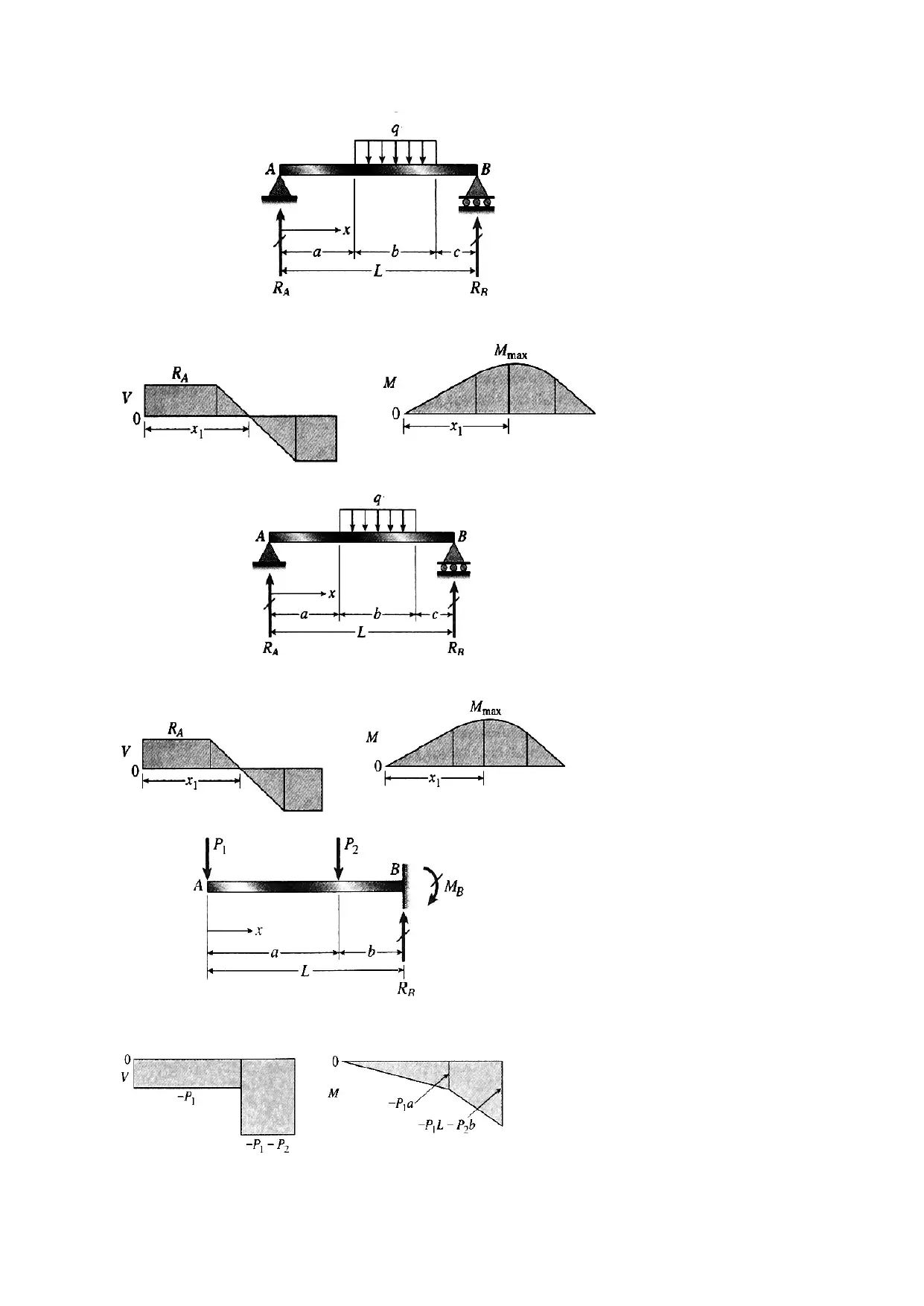
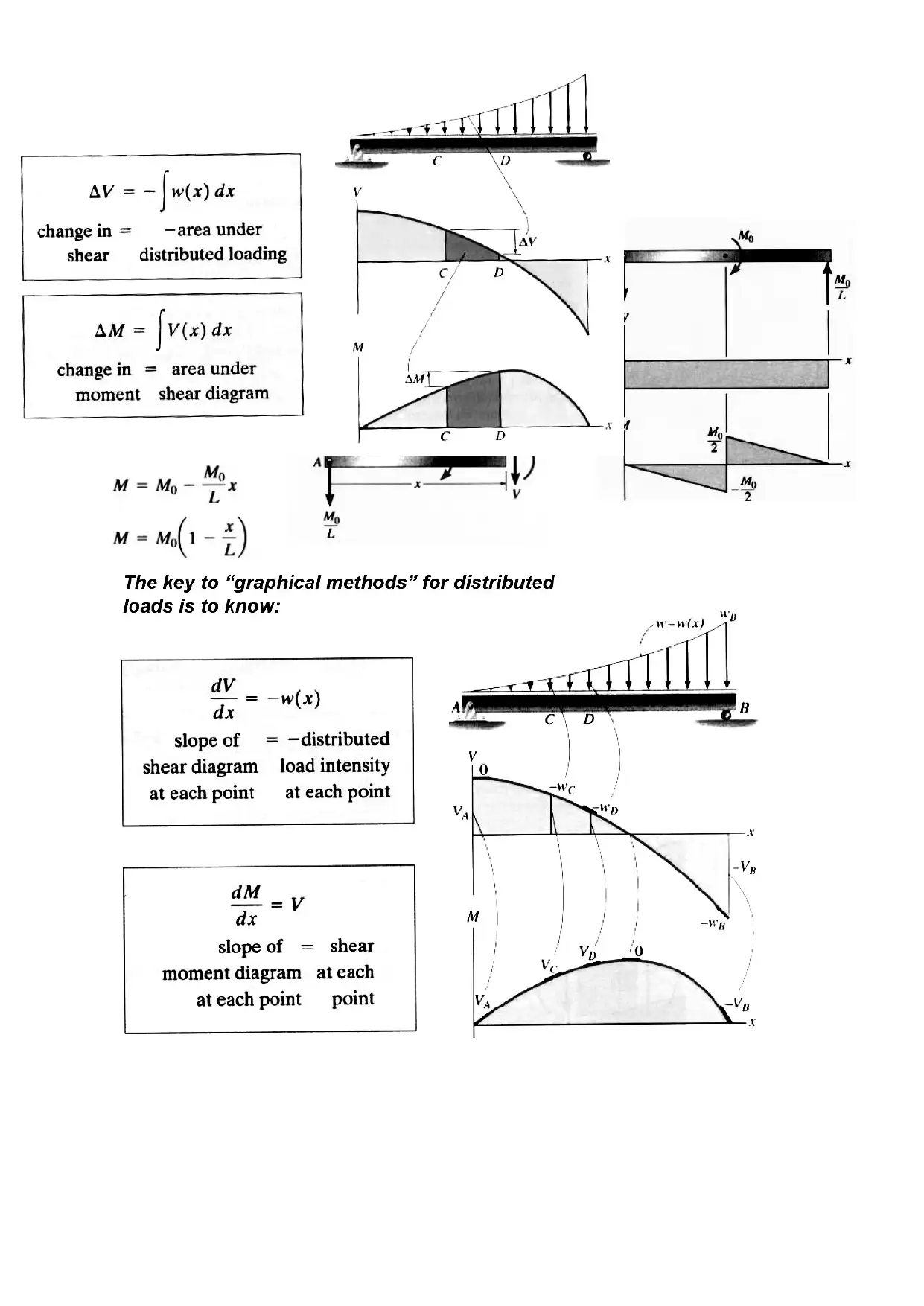
This document presents an analysis of static engineering systems, focusing on two primary areas: the mechanics of beams and the principles of electrical circuits. The beam analysis section explores different types of loading (axial, bending, torsional) and beam classifications based on support methods. It delves into concepts such as direct stress, direct strain, Hooke's law, and Poisson's ratio, with detailed explanations of shear force and bending moment diagrams for various load types. The electrical circuits section introduces fundamental concepts like voltage, current, and Kirchhoff's laws, alongside AC and DC circuit analysis. It describes circuit elements like resistors, inductors, and capacitors, with equations for their behavior. Furthermore, it touches on complex numbers in AC analysis and phasor diagrams. The document provides a comprehensive overview of the principles and analysis techniques for both structural and electrical engineering systems.

1 out of 32
Related Documents




Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.