Analysis and Design of a PID Controller for Brick Cart System
VerifiedAdded on 2023/06/05
|12
|2353
|248
Project
AI Summary
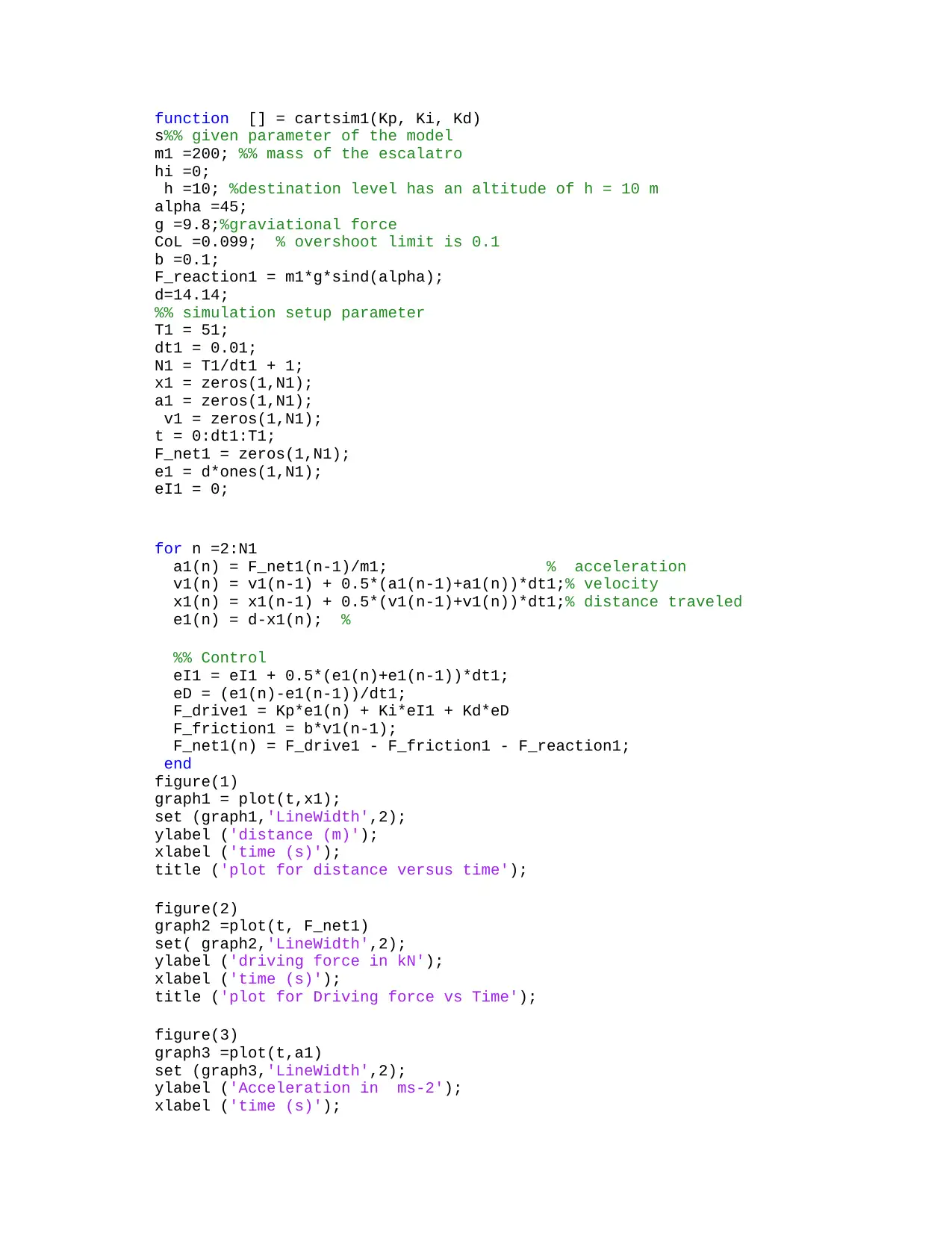
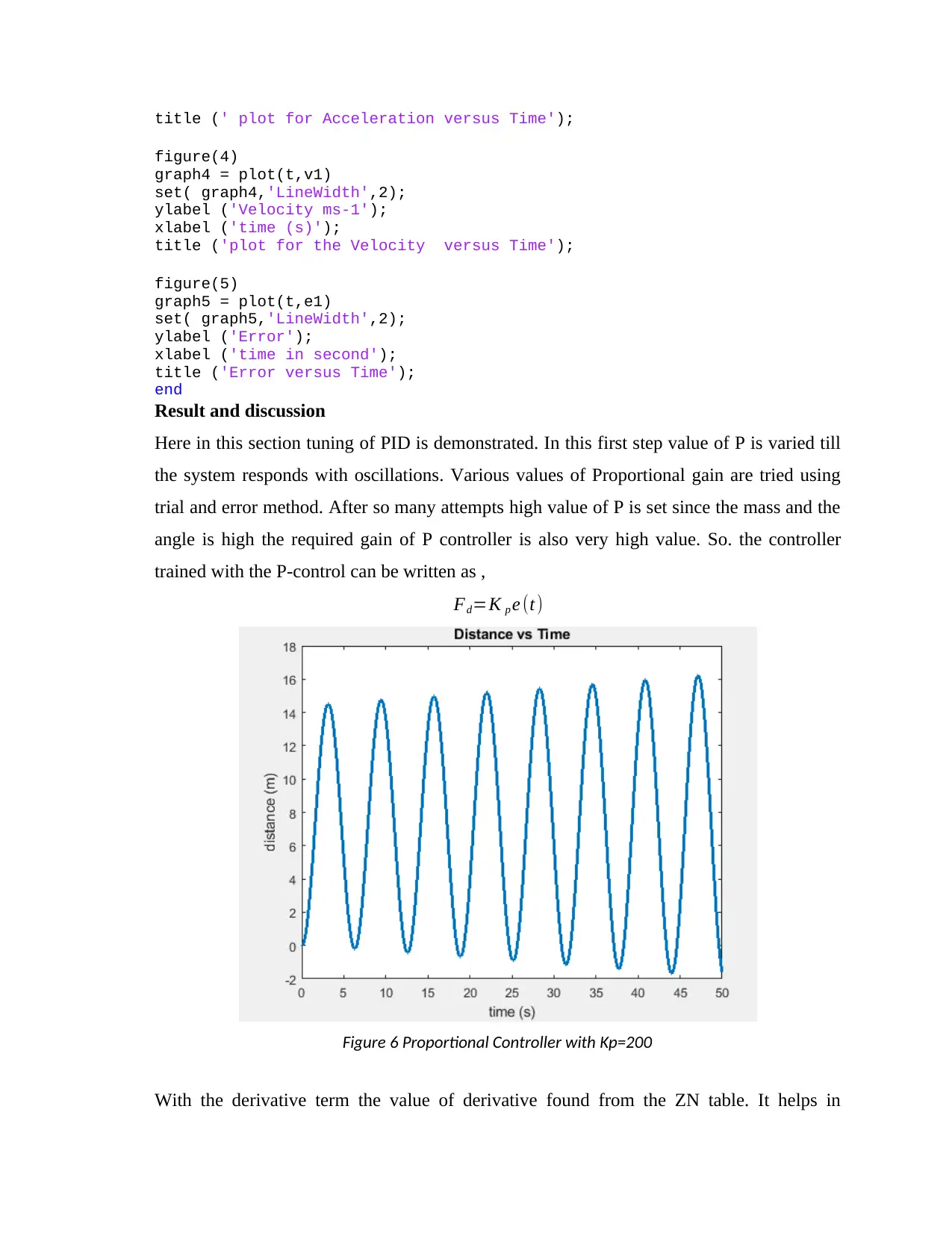
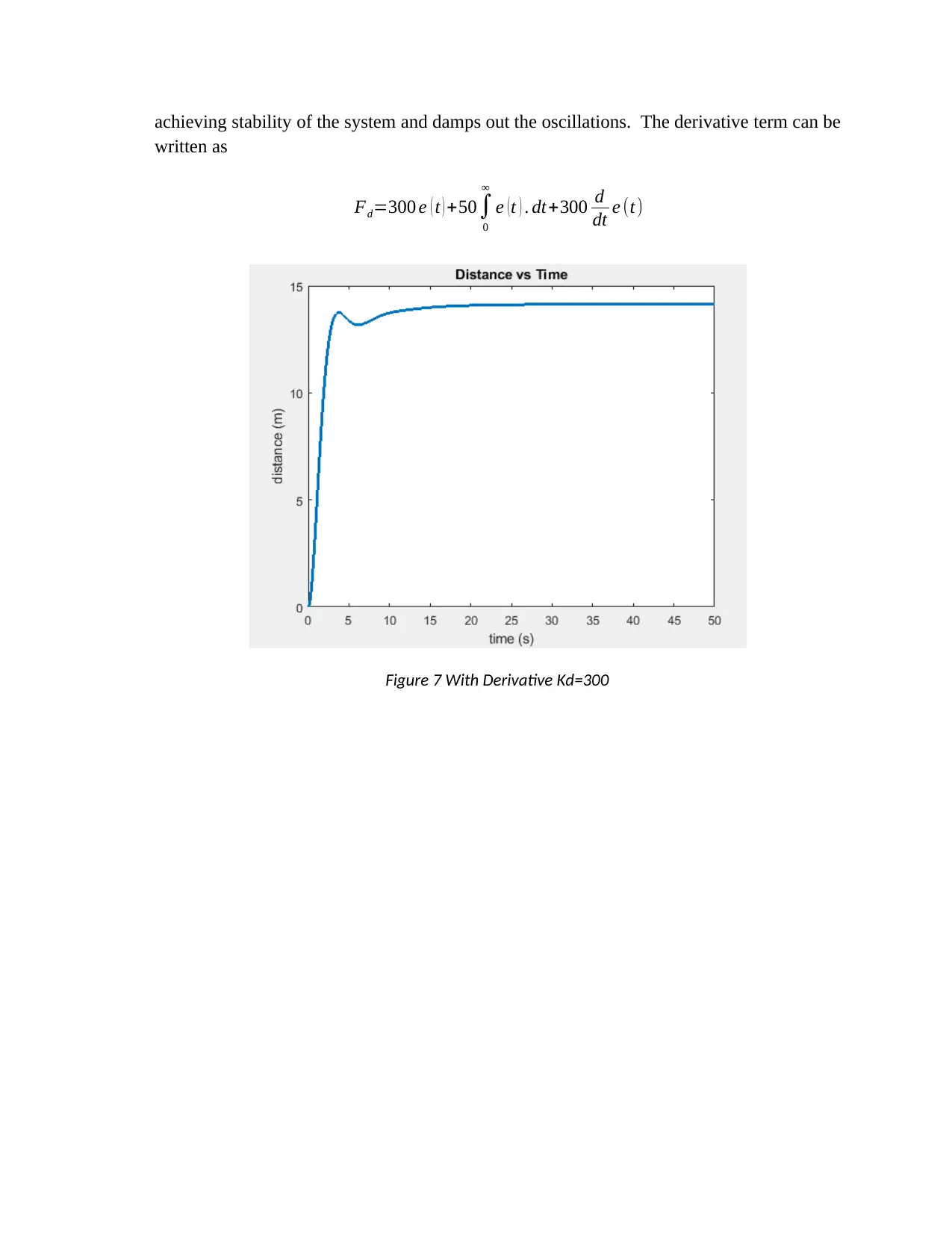
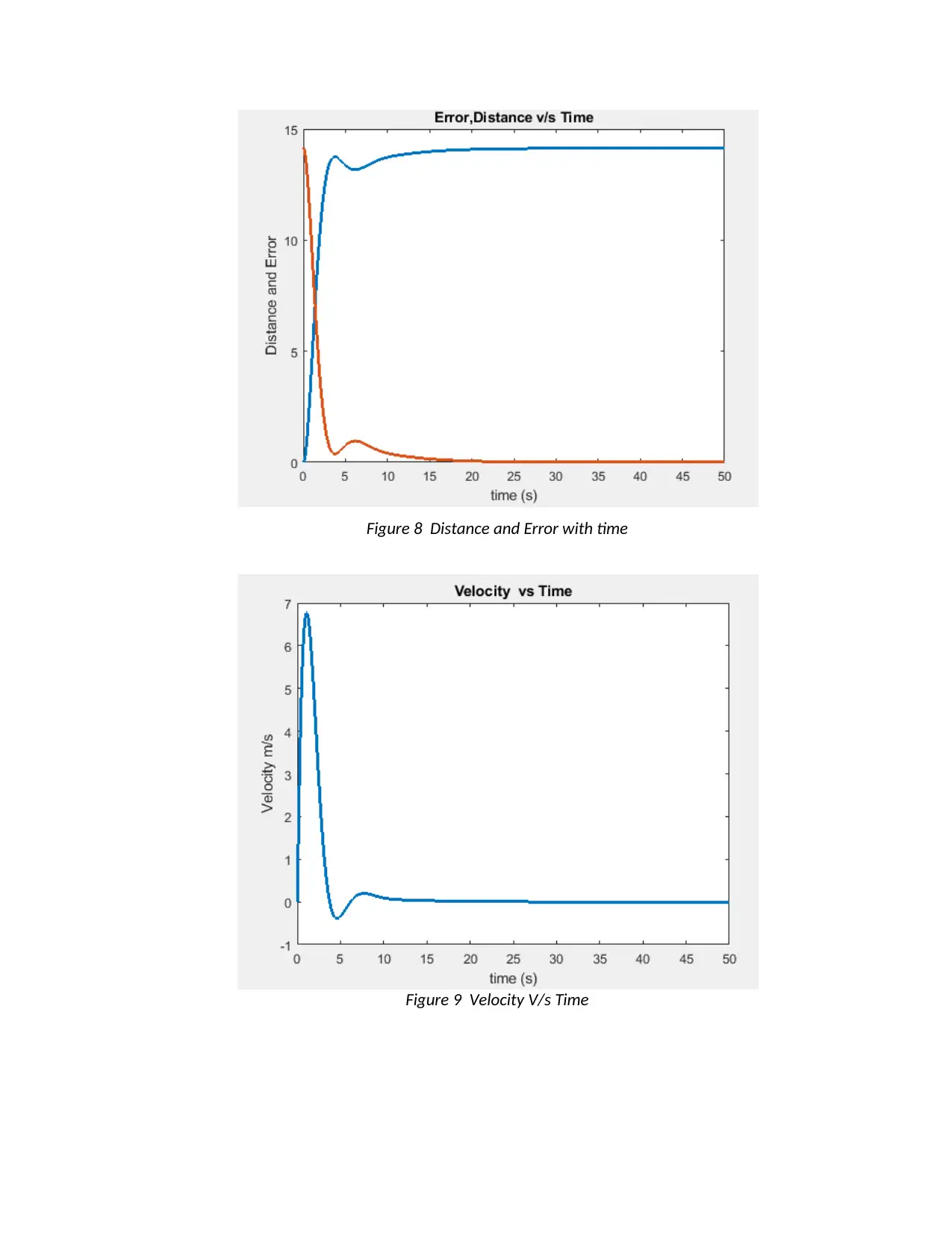
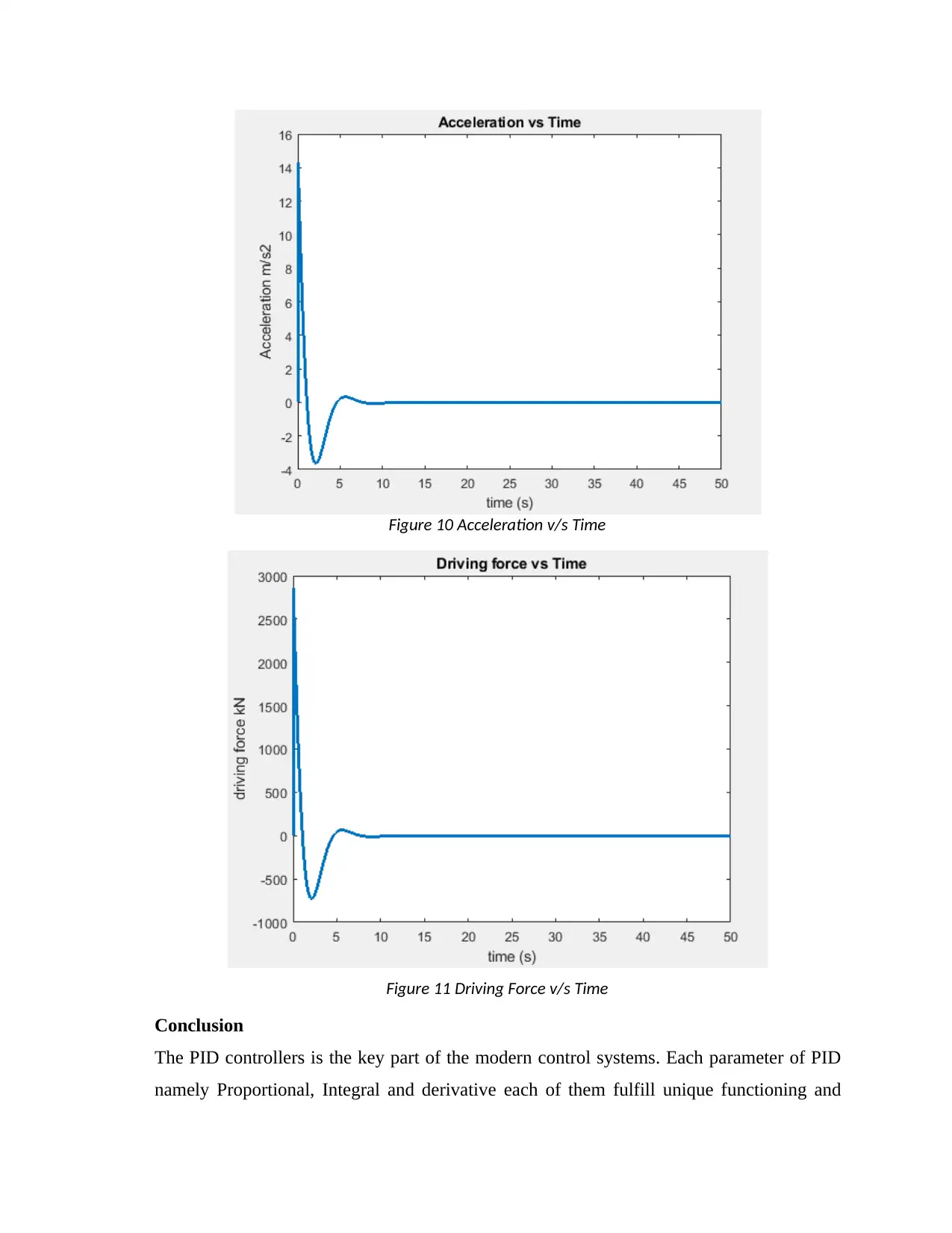
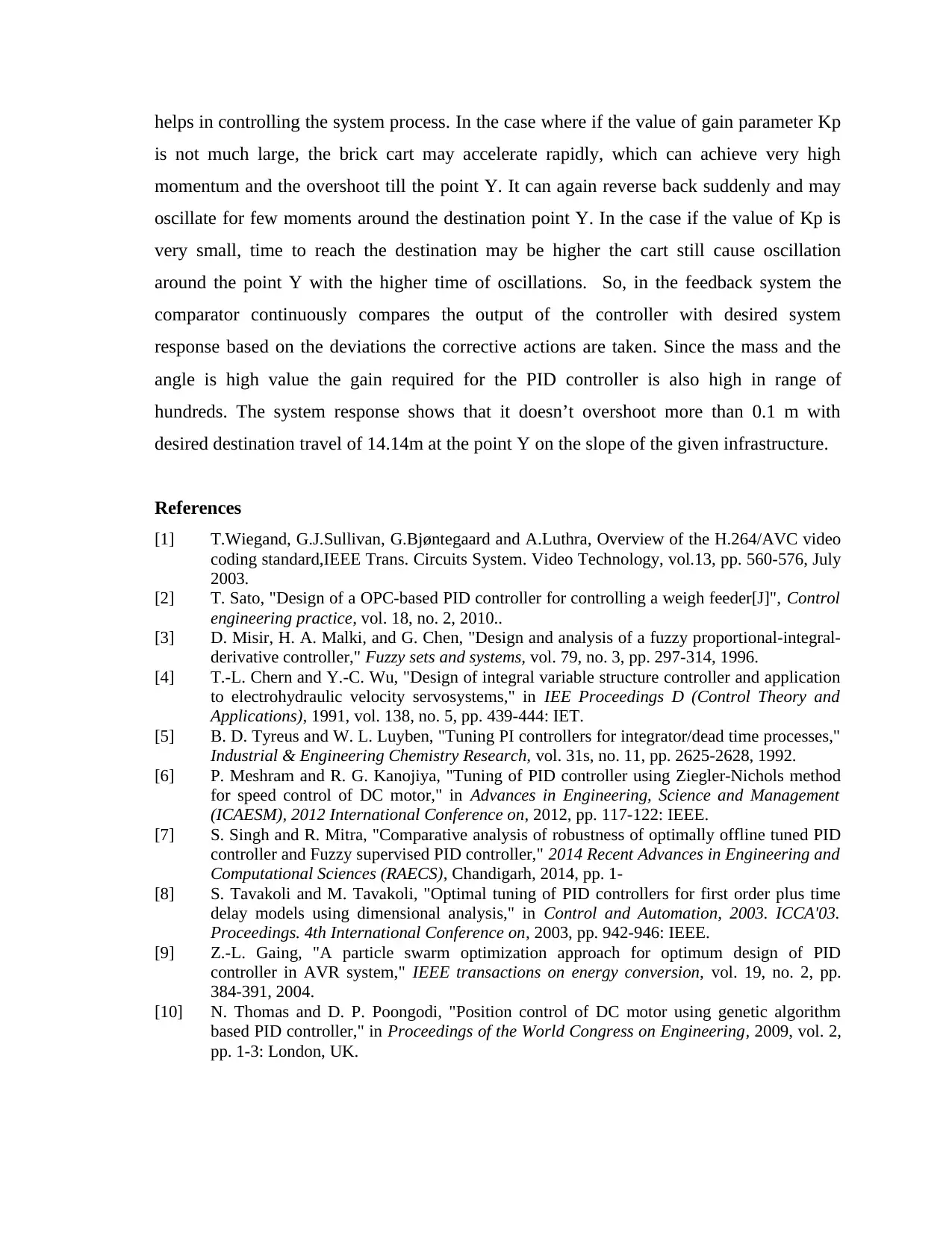
This project details the design and implementation of a PID controller for a brick cart system. The assignment begins with an introduction to control systems and the importance of PID controllers in various engineering applications. The main aim is to control the brick cart's movement from a base point to a destination, considering parameters like velocity, acceleration, and overshoot. The methodology includes an explanation of open and closed-loop control systems, with a focus on the PID controller structure. The Zeigler-Nichols method is employed for tuning the PID parameters. The project includes the derivation of equations for forces, displacement, velocity, and acceleration acting on the brick cart. MATLAB code is provided to simulate the system and analyze the performance of the PID controller with proportional, derivative, and integral terms. The results and discussion section presents the tuning process, including the impact of different PID parameters on the system's response, along with graphical representations of the results. The conclusion summarizes the functionality of each PID parameter, emphasizing the importance of controller tuning and the achieved performance, including overshoot limitations. References to relevant literature are also provided.


1 out of 12
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.