CIS116-6 Wireless Embedded Systems: Assignment Part-I Control Solution
VerifiedAdded on 2023/06/10
|18
|3362
|411
Project
AI Summary
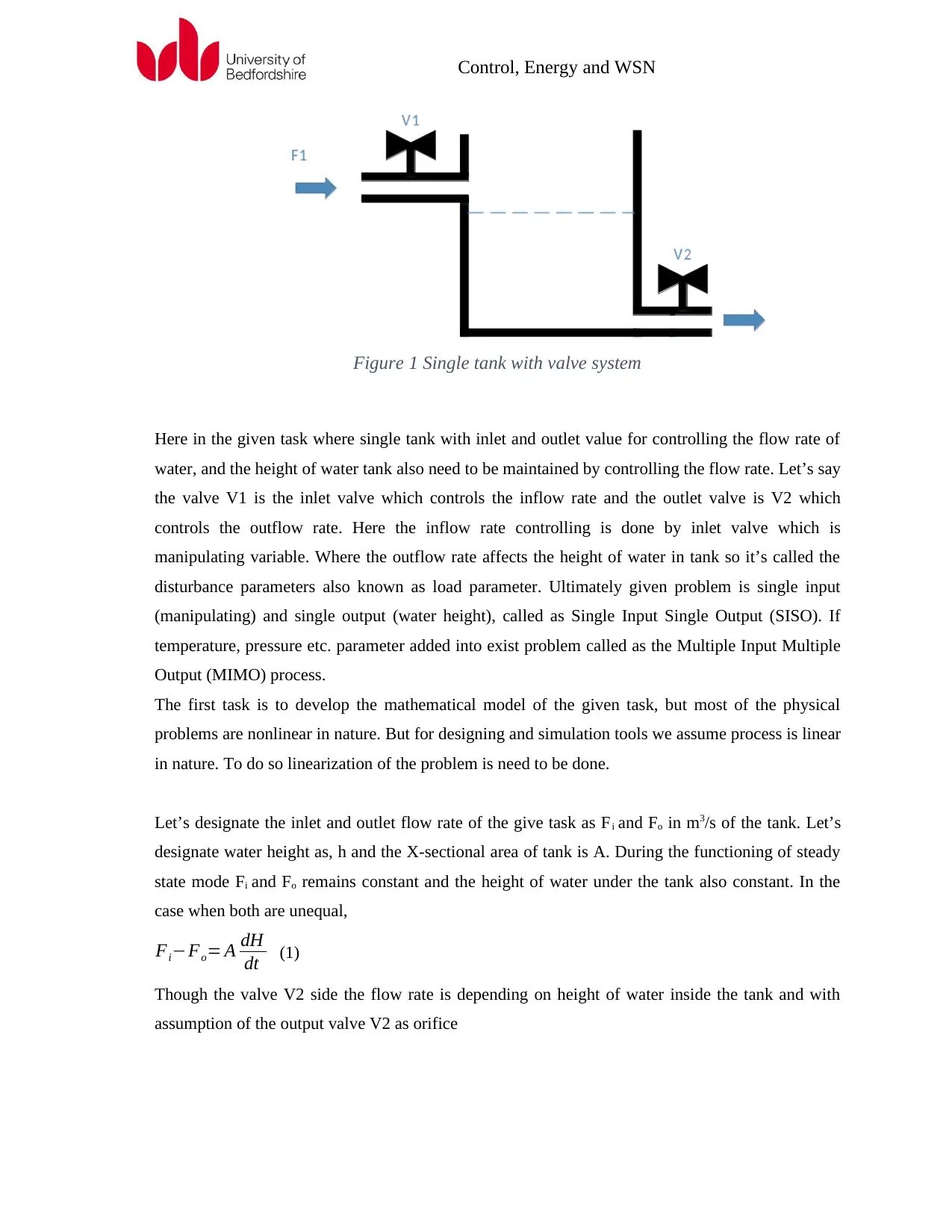
This assignment solution for CIS116 Wireless Embedded Systems addresses the control of a single-tank system. The solution begins with an overview of control processes, including SISO and MIMO systems, and the application of PID controllers. It then details the design of a single-tank system with inlet and outlet valves, deriving the mathematical model and transfer function for the system. The solution incorporates the use of a bottle and tag system for water level control. The assignment further develops a fuzzy logic controller using MATLAB Simulink and integrates it into a closed-loop control system. The performance of the closed-loop system is evaluated, with analysis of rise time, settling time, and stability. Open loop and closed loop simulations are presented, along with the analysis of the system with and without fuzzy logic controller, comparing the performance of different tuning methods. The report also provides MATLAB code and simulation results to validate the findings. The assignment's primary focus is on analyzing control systems, designing controllers, and evaluating system performance through simulation and mathematical modeling.


1 out of 18
Related Documents





Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.