Control System Design Project: LTI System Analysis and Design
VerifiedAdded on 2021/06/17
|12
|1530
|71
Project
AI Summary
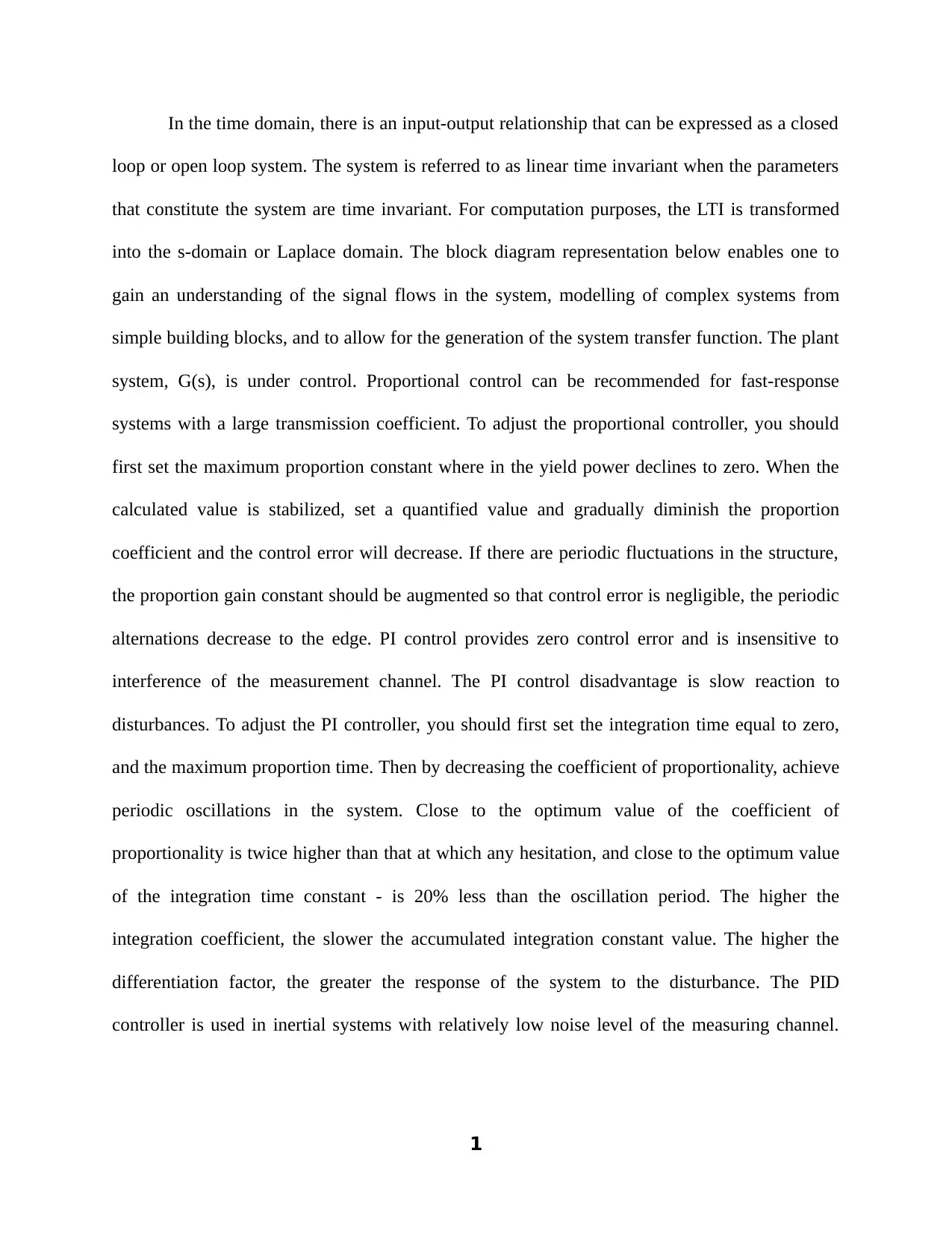
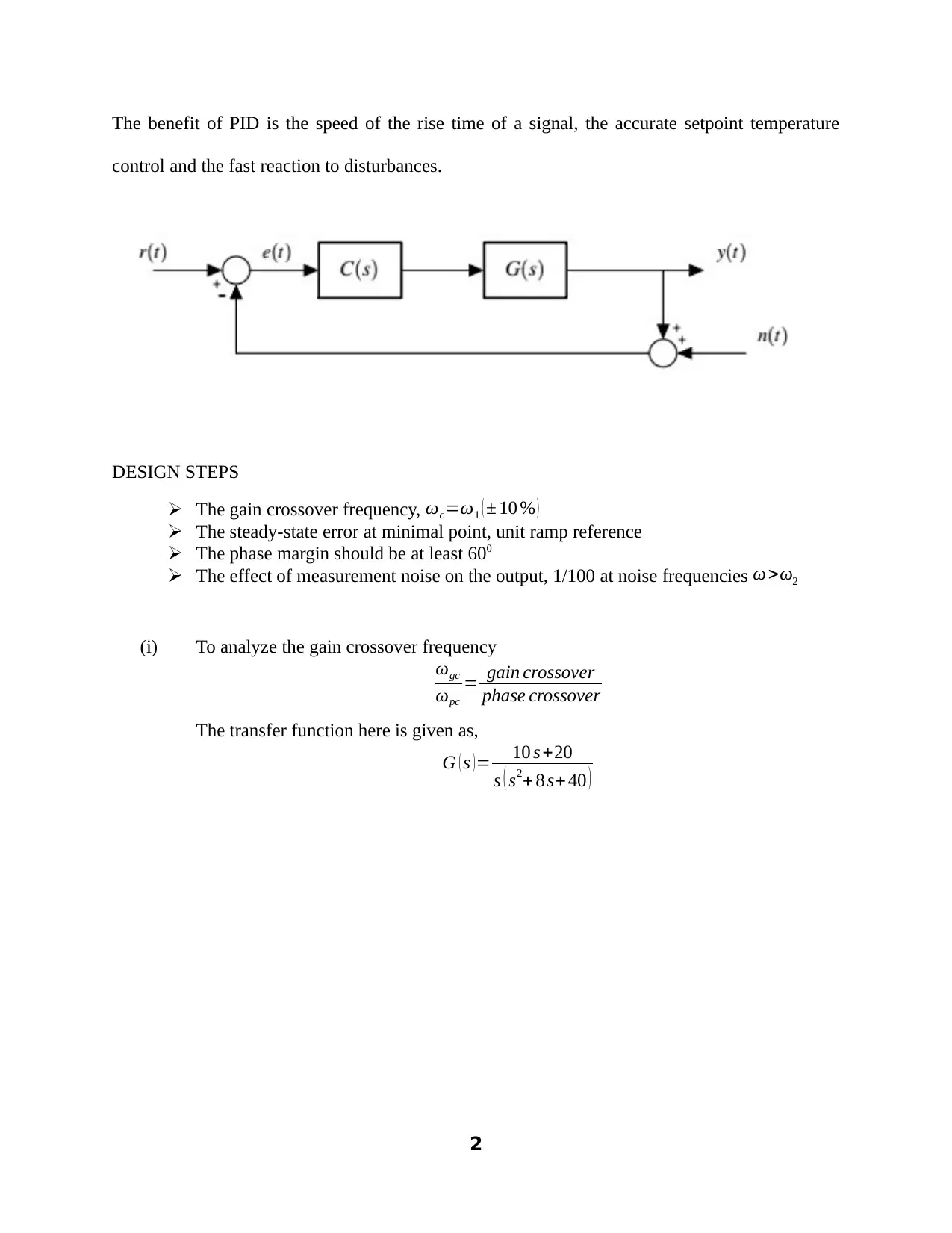
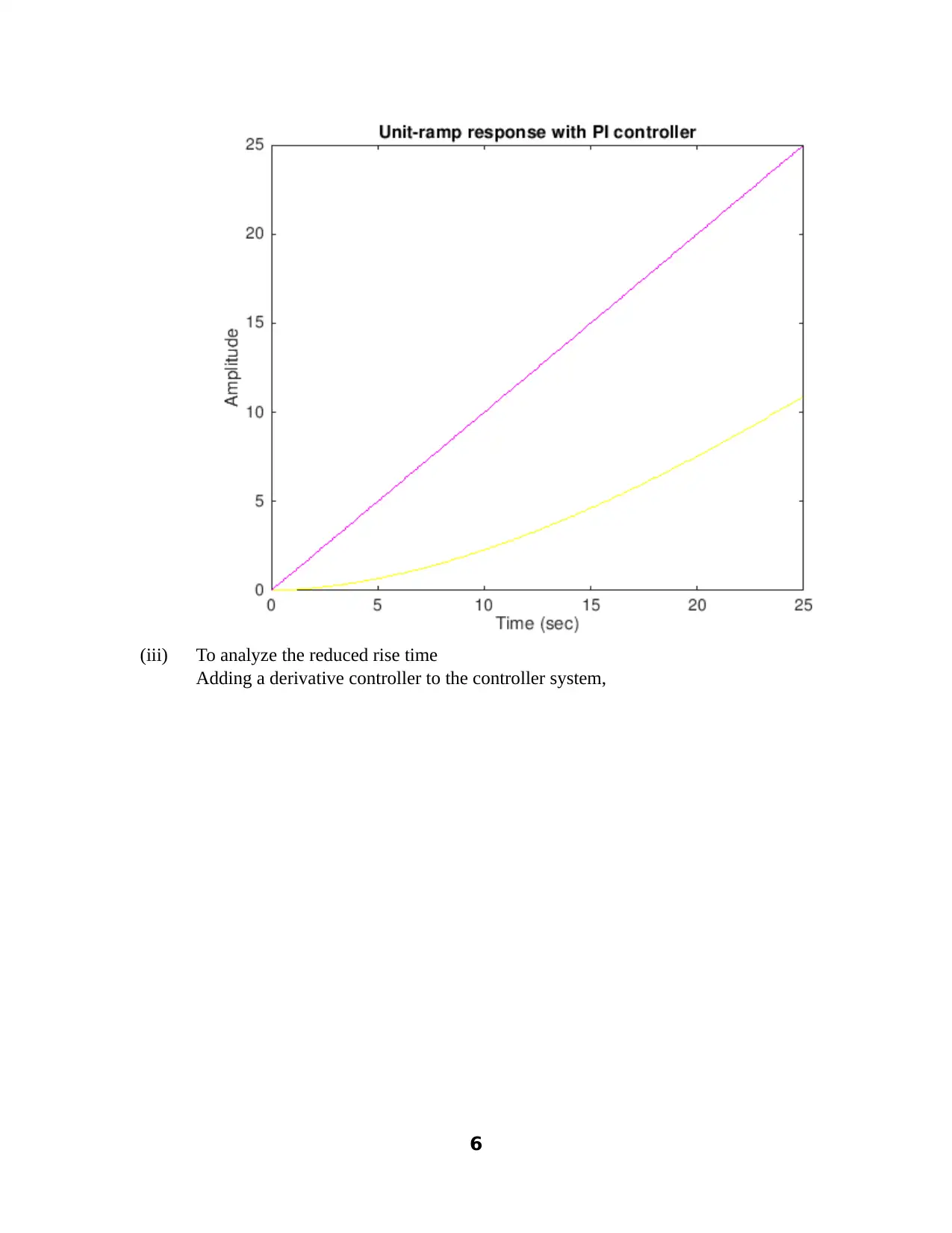
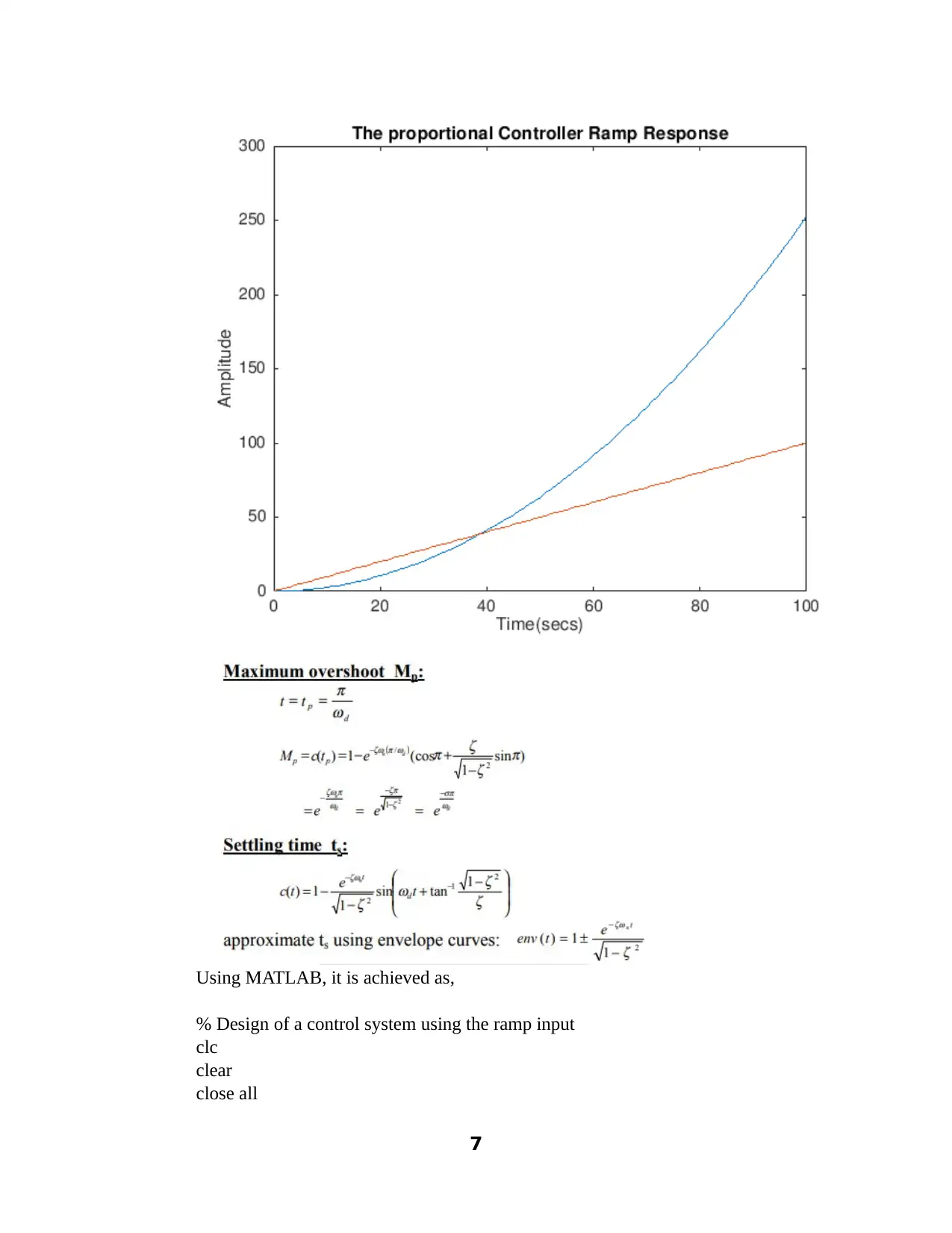
This project details the design and analysis of a control system using proportional, integral, and derivative (PID) controllers within the context of a linear time-invariant (LTI) system. The assignment explores the relationships between input and output signals, transforming the system into the s-domain for computational purposes. The project emphasizes the use of block diagrams for signal flow understanding and system modeling. It investigates the application of proportional, integral, and derivative control strategies, discussing their respective advantages and disadvantages, and provides guidelines for controller adjustments. Key design criteria such as gain crossover frequency, steady-state error, phase margin, and the impact of measurement noise are addressed. The student utilizes MATLAB to simulate the system's response to a ramp input, analyzing the transient and steady-state behavior. The results are presented graphically, illustrating the effects of each controller component on the system's performance, including rise time, overshoot, and settling time. The discussion section reflects on the trial-and-error design process and the importance of stability analysis using root locus. The project concludes with recommendations for achieving desired system performance and emphasizes the role of feedback loops in ensuring the intended output despite disturbances.



1 out of 12
Related Documents





Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.